Tesla阀性能的影响因素及其优化分析
2020-08-05 02:42:32陈昱嘉
物理实验 2020年7期
陈昱嘉
(西安交通大学 数学与统计学院,陕西 西安 710049)
由于Tesla阀没有可动部件,不能使流道完全闭合,所以压差比(Tesla阀的反向压降与正向压降的比值)是衡量Tesla阀性能的最重要的指标[1]. 压差比越大说明阀的阻断性能越好. 为了提高Tesla阀的性能,必须对其结构参量进行优化设计. 需要研究Tesla阀内部流场,分析其性能受到哪些因素影响及其影响程度[2]. 在Tesla阀的优化设计方面,国内外现有大多数研究成果是应用CFD(Computational fluid dynamics)软件技术,对Tesla阀进行仿真分析,实现对几何结构、尺寸参量的优化设计. 由于CFD技术计算结果的精度往往取决于对复杂流场仿真前置处理时的边界条件、物性参量等是否与实际情况一致,以及计算方法与后置处理是否准确等方面[3]. CFD仿真结果是否有效,仍需要进行实验验证.
本文利用数控加工技术,制作Tesla阀模型,通过试验研究,探究Tesla阀的几何结构和尺寸参量、使用条件(流体压差、黏度)对Tesla阀性能的影响. 在给定的阀体整体结构尺寸约束条件下,研究Tesla阀的几何结构、尺寸参量的优化设计方法,实现Tesla阀性能最优.
1 Tesla阀模型与制作
1.1 模型建立
Tesla阀是由多个相同几何构型的瓣膜管道拼接而成的,如图1所示[4-6].

图1 Tesla阀瓣膜管道结构示意图
单个瓣膜管道的几何构形可由分叉角α、汇入角β、弯道半径R、瓣膜管道间的距离L和管道直径W决定. 因此选择其中1个瓣膜管道进行建模,最终将N个瓣膜管道拼接在一起便可形成完整的Tesla阀. 本文不考虑管径W的影响,选择沿着Tesla阀的管道中心线建立阀的数学模型,如图2所示.

图2 Tesla阀单个瓣膜管道数学模型
对于图2中的阀体得到方程组I:
(1)
(2)
(3)
(4)
(5)
解得
(6)
(7)
将O′点坐标(x0,y0)代入式(2)~(5)得到A和B点的坐标(xa,ya),(xb,yb).
1.2 模型制作
采用T-500高速钻攻中心,按照图2瓣膜管道数学模型,编制数控加工程序,控制刀具沿着图3所示的瓣膜管道中心线进行加工. 利用直径5 mm的球头铣刀,在2块同尺寸亚克力板上铣出正反两面的半个管道,如图4所示. 然后,将2块已加工好瓣膜管道的亚克力板,利用螺丝和螺母组装起来,并在阀体两端的进出水口加工螺孔,连接进出水接头.

图3 瓣膜管道中心线的数控加工轨迹

图4 加工在亚克力板上正反两面的瓣膜管道
由于T-500的高速钻攻中心的加工误差小于±0.02 mm,所制作的Tesla阀模型的精度满足实验要求.
按照以上方法,制作了18个Tesla阀模型,其基本参量如表1所示.
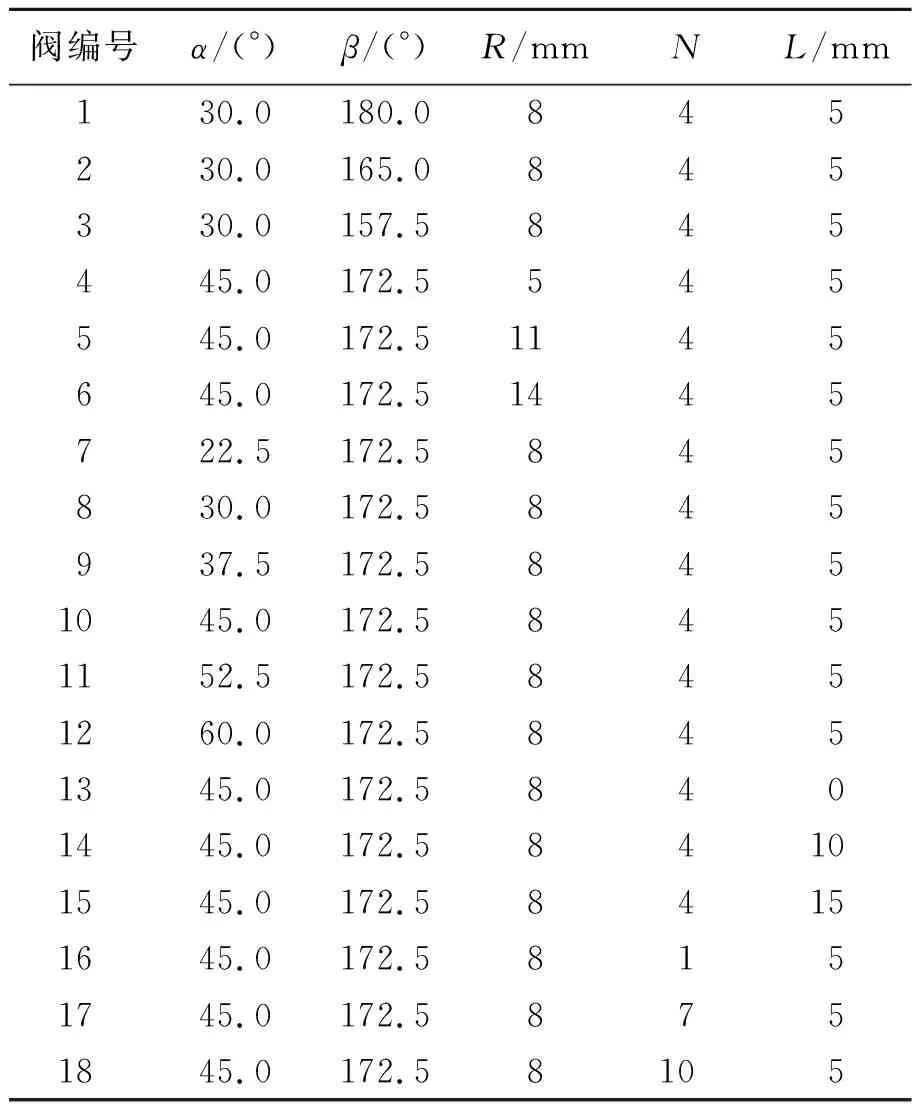
表1 实验用Tesla阀的基本参量
2 Tesla阀性能分析
2.1 Tesla阀机理分析
为了解Tesla阀顺流与逆流的流体阻断机理,使用有限元分析方法,利用ANSYS软件,对单个瓣膜管道进行几何建模.
2.1.1 网格划分
仿真采用非结构网格,网格总数为20×105,网格质量控制在0.7以上.
2.1.2 仿真参量设置
1)采用RNGk-ε湍流模型,SIMPLEC算法求解.
2)速度入口:设定来流速度的大小与方向,此处设置为1 m/s.
3)压力出口:认为流动在该处已经充分发展,故边界条件使用压力出口.
4)壁面:管道壁面,设定无滑移条件,u=v=w=0.
5)阀体几何参量设置:分叉角α取60°,汇入角β取172.5°,弯道半径R取8 mm,瓣膜管道个数N取4.
2.1.3 仿真结果
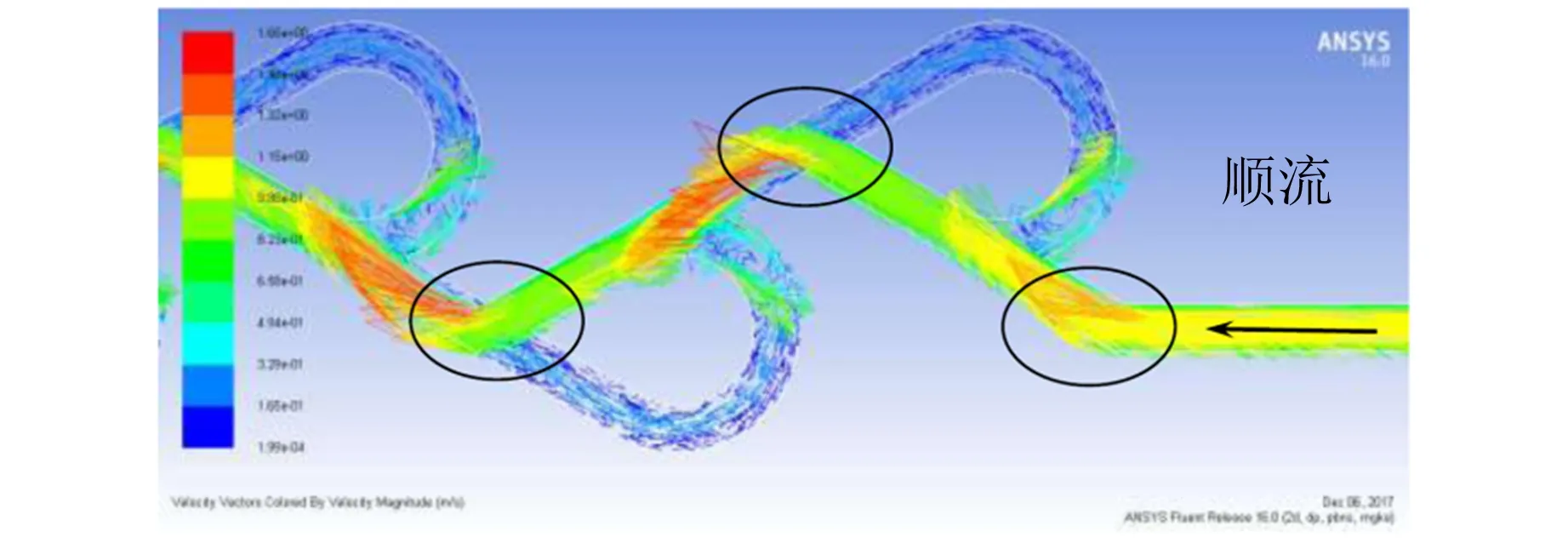
通过观察绘制的顺流和逆流速度云图(图5),发现在顺流时,流阻主要产生于分叉角α处,其原因是流体的流动方向发生变化. 而在逆流时,流阻主要产生于汇入角β处,其原因是直管和弯管中的水流相互撞击,导致流阻变大. 无论是顺流还是逆流,流阻大小都与管道内流体流速v有关,但流速对逆流流阻的影响,大于对顺流的影响. 流速太小会导致Tesla阀的阻流效应失效.
(a)
参照电路分析中对电阻的定义,引入流阻G,并使用逆顺流阻比M衡量Tesla阀的性能.
(8)
(9)
2.2 Tesla阀性能测试的实验方法
采用控制变量法,通过固定水桶中的水面到Tesla阀阀口的高度,以固定Δp,通过测量流体质量和秒表计时的方式,利用
(10)
得到流量Q,进而得到流阻G和流阻比M.
实验装置如图6所示. 首先配置好水桶,将长导水管的一端连接在水桶出口处,另一端连接到Tesla阀的入口处. 将短导水管一端接到Tesla阀的出口处,另一端置于已经固定高度的烧杯杯口. 向水桶中持续加水,保证水桶中的水面到Tesla阀阀口的高度保持一定. 打开长导管上的止水夹,等到Tesla阀中的气泡被排尽,且Tesla阀内流体处于稳定流动后,开始测量流体质量和时间. 顺逆流各测量3次流体质量和时间.
通过改变水面到特斯拉阀的高度差,改变Tesla阀的压差. 通过在水中配置不同比例的甘油,改变流体的黏度. 通过更换Tesla阀实物模型,改变Tesla阀的几何参量.

图6 Tesla阀性能测试实验方法示意图
2.3 Tesla阀性能的影响参量
2.3.1 流体压差
采用10号阀进行实验. 通过调整水桶水面与Tesla阀之间的高度差h,改变Tesla阀两端的压差. Tesla阀的流阻G和流阻比M实验数据如表2和图7所示.

表2 压差对Tesla阀流阻比M的影响

图7 压差对Tesla阀逆顺流阻比的影响
将实验数据采用f(x)=axb拟合得到(95%置信区间):
M=-1.151h0.057 81,h∈[0,+∞).
(11)
曲线拟合均方根误差为0.008 5,从实验数据,可以得到结论:压差越大, Tesla阀的性能越好,且满足式(11).
2.3.2 流体黏度
仍采用10号阀进行实验. 通过调整甘油与水的溶液配比比例φ改变流体的黏度. 对不同黏度的流体进行实验,计算Tesla阀的流阻G和流阻比M,实验数据结果如表3和图8所示.

表3 流体黏度对Tesla阀流阻比M的影响

图8 不同黏度对Tesla阀逆顺流阻比的影响
采用f(x)=ax2+bx+c对实验数据进行拟合,得到(95%置信区间):
(12)
拟合均方根误差为0.021 71.
随着甘油水溶液的体积分数增大(即黏度增大),Tesla阀的流阻比减小并趋于1. 这是因为液体黏度增大导致了沿程阻力的增大. 尽管沿程阻力的增大会在一定程度上导致阻流效果更好,但是与此同时其流速也因此大大降低,从而Tesla阀难以发挥其构型带来的阻流作用,说明Tesla阀并不适用于高黏度的流体.
2.4 Tesla阀的几何结构参量
2.4.1 分叉角α
利用7~12号Tesla阀进行实验. 将实验数据采用f(x)=axb+c进行拟合得到式(95%置信区间):
M=-1.439×10-7α3.414+1.566,α∈[0,90].
(13)
实验数据拟合图像如图9所示. 拟合均方根误差为0.007 893,Tesla阀的逆顺流阻比M会随着分叉角α变大而减小,呈现由缓至陡的变化趋势.
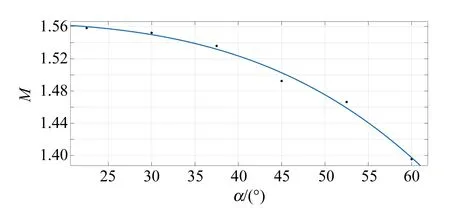
图9 分叉角α对Tesla阀逆顺流阻比的影响趋势
2.4.2 汇入角β
利用1,8,2,3号Tesla阀进行实验. 实验数据采用f(x)=axb+c拟合得(95%置信区间):
M=5.656×10-16β6.453+1.387,β∈[90,180].
(14)
实验数据拟合图像如图10中. 拟合均方根误差为0.022 73. Tesla阀的逆顺流阻比M会随着汇入角β变大而增大,呈由缓至陡的变化趋势.

图10 汇入角β对Tesla阀逆顺流阻比M的影响趋势
2.4.3 弯道半径R
利用6,5,10,4号Tesla阀进行实验. 通过实验数据可得到定性结论:Tesla阀的逆顺流阻比M会随着弯道半径R变大先增大后减小. 但由于实验数据本身的缺乏,无法依据实验数据直接得到对应的定量拟合函数. 依据其变化趋势,采用f(x)=ax3+bx2+cx+d对实验数据进行拟合(95%置信区间):
M=0.003 304R3-0.105 8R2+1.053R-1.685,R∈[5,14].
(15)
实验数据和拟合如图11所示. 由于本文只有4个数据点,实验数据必定完美符合上述拟合公式,但逆顺流阻比M在R∈[5,14]时是否满足式(15)还需更多数据点进行佐证.

图11 弯道半径R对Tesla阀逆顺流阻比的影响趋势
2.4.4 瓣膜管道间的垂直距离L
共利用13,10,14,15号Tesla阀进行实验. 当L=0时,Tesla阀的逆顺流阻比M最大;当L≠0时,逆顺流阻比M会下降,其中L<0比L>0下降的更快(图12). 这是由于当L<0时,汇入角处的结构遭到破坏,逆流时直管与弯管水流无法很好的进行碰撞,从而逆流的阻碍作用大打折扣. 而当L>0时,L增大只会徒增整个Tesla阀的长度,从而增大阀的沿程阻力,这对逆流顺流都会造成影响.

图12 13,10,14,15号Tesla阀实验数据
但由于实验数据本身的缺乏,无法依据实验数据直接得到对应的定量拟合函数. 依据其变化趋势,本文采用f(x)=axb+c对实验数据进行拟合(95%置信区间)
M=-0.051 37L0.430 3+1.492,L∈[0,+∞).
(16)
后3组实验数据拟合的图像见图13. 由于此

图13 瓣膜管道间的垂直距离L对Tesla阀 逆顺流阻比的影响
处只取了3个数据点,实验数据必定完美符合上述拟合公式,但逆顺流阻比M在L∈[0,+∞)时是否满足式(16)还需更多数据点进行佐证.
2.4.5 瓣膜管道个数N
利用16,10,17,18号,Tesla阀进行实验. 将实验数据采用f(x)=axb的幂函数进行拟合得到如下拟合公式(95%置信区间)
M=1.075N0.245 2,N∈N+.
(17)
实验数据拟合图像如图14所示. 拟合公式的均方根误差为0.021 31. Tesla阀的逆顺流阻比M会随着瓣膜管道个数N的增大而增大.

图14 瓣膜管道个数N对Tesla阀逆顺流阻比的影响
3 Tesla阀的综合优化
3.1 几何参量对阀尺寸影响
3.1.1 瓣膜管道间的垂直距离L


图15 Tesla阀单个瓣膜管道数学模型细致化
首先研究瓣膜管道间的垂直距离L对矩形P的长的影响. 此时对矩形P的长的影响反应在线段OD的长度变化上. 如对于某2个瓣膜管道间的垂直距离L,
(18)
由式(18),随着瓣膜管道间的垂直距离L增大,矩形P的长会线性增大. 又由2.3.4节,当L=0时,Tesla阀的逆顺流阻比M最大;当L≠0时,逆顺流阻比M会下降. 总结来讲,瓣膜管道间的垂直距离L的增大会增大尺寸,减弱性能. 因此,L=0即是最优的情况.
3.1.2 汇入角β
汇入角β对矩形P的长的影响,反映在线段OH的长度变化上. 由1.1节式(6)~(7)得
(19)

(20)
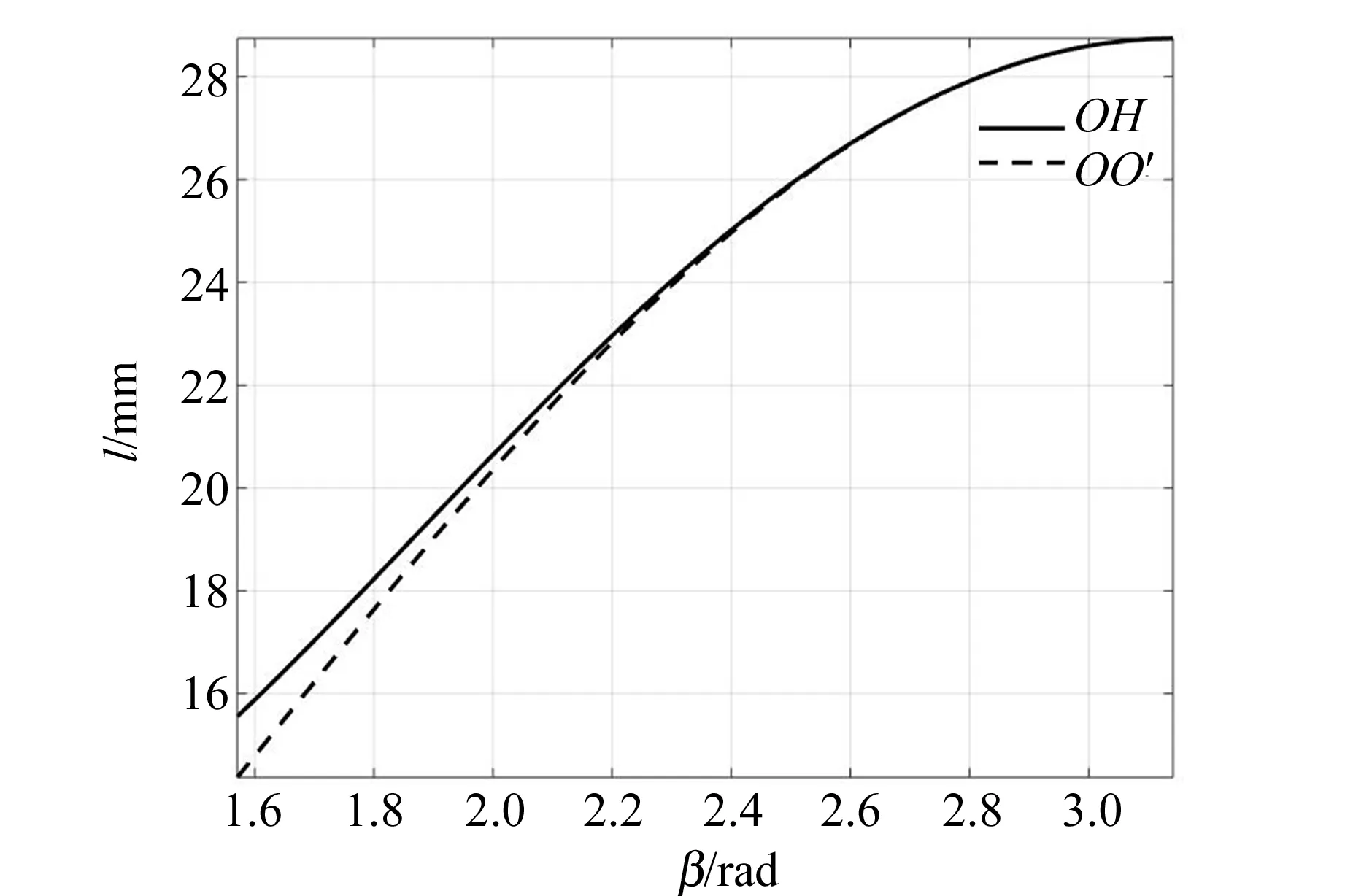
图16 线段OH和OO′长度随着汇入角β的变化趋势
3.1.3 分叉角α和弯道半径R

此时弯道半径R与线段OH的长度成正比;分叉角α与线段OH的长度成反比. 由于弯道半径R对线段OH的影响大致呈线性,属于可接受范围内,且根据图14可看出看出R=8 mm时阀体可达到最优性能,因此固定弯道半径R为8 mm. 相对的,分叉角α对线段OH的影响较大,并且分叉角α对逆顺流阻比M的影响又相对复杂,因此,分叉角α需要进行进一步优化.

图17 线段OH长度随着分叉角α的变化趋势
图18 线段OH长度随着弯道半径R的变化趋势
通过以上分析,最终固定了以下参量:瓣膜管道间的垂直距离L=0,汇入角β=π,弯道半径R=8 mm;并在固定了以上3个参量的条件下,进行综合优化.
3.2 综合优化
L0为亚克力板可用部分的长度(已减去入水口和出水口所需的攻丝螺纹长度). 若给定L0,通过
可得到最大可容纳的瓣膜管道个数. 注:[]为向下取整.
利用薄板样条插值方法和前文实验得到的数据点,可以得到逆顺流阻比M关于分叉角α和瓣膜管道个数N的函数M(α,N),结果如图19~20所示.

图19 薄板样条插值方法得到M(α,N)的三视图视角

图20 薄板样条插值方法得到M(α,N)的上视图视角
将分叉角α从22.5°~60°均分为2 000份,取逆顺流阻比M最大的组即为最优解. 通过改变阀体可用的最大长度L0,给出了最大逆顺流阻比M随L0的变化曲线并进行了拟合,如图21所示.

图21 最大逆顺流阻比M随L0的变化曲线
图21表明,当L0从30 mm(再短会导致做不出来任何瓣膜管道结构而失去意义)变化至1 030 mm时,最大逆顺流阻比M随L0呈指数增长,采用f(x)=axb的指数函数进行拟合(95%置信区间):
(21)
拟合均方根误差为0.011 57,综上,当给定了阀体可用的最大长度L0时,可以通过式 (21)推算该阀可能达到的最大逆顺流阻比M;当对阀体性能 (即逆顺流阻比M)有特定需求时(如: 必须达到2及以上),也可以通过式 (21)反推阀体至少要达到的最短长度.
4 结束语
本文建立了Tesla阀的几何结构参量化的数学模型,分析了Tesla阀阻流特性的形成机理. 利用数控加工技术,提出了Tesla阀模型制作方法,并制作了多种结构参量的Tesla阀模型. 设计了Tesla阀的性能测试的试验方法. 在给定的阀体整体结构尺寸约束条件下,开展了对Tesla阀的几何结构参量的优化设计,实现了Tesla阀性能最优. 本文的研究工作和仍有待进一步深化和完善. 对于Tesla阀的瓣膜管道的几何构形、结构参量(如变管道直径)、拼接方式等仍有很多可以创新和优化的内容,有待于进一步深入研究.
猜你喜欢
中国水运(2020年6期)2020-11-17 09:41:54
化肥设计(2019年3期)2019-07-02 07:59:54
人物(2019年9期)2019-02-13 03:00:50
汽车与驾驶维修(维修版)(2018年9期)2018-11-15 06:20:54
汽车与驾驶维修(维修版)(2017年12期)2018-01-15 01:43:39
汽车与驾驶维修(维修版)(2017年6期)2017-09-03 08:50:58
中国经贸(2016年7期)2016-10-21 01:39:38
物理实验(2015年9期)2015-02-28 17:36:51
数学年刊A辑(中文版)(2014年4期)2014-10-30 01:50:32
声学技术(2014年2期)2014-06-21 06:59:14