传统岸边集装箱起重机自动化远程控制改造优化
2020-08-04 19:20邱涛林栋李凌凯
集装箱化 2020年6期
邱涛 林栋 李凌凯
岸边集装箱起重机(以下简称“岸桥”)是集装箱码头用于集装箱船装卸作业的专业设备。在传统岸桥作业过程中,岸桥司机需要高度集中精力地操控岸桥各机构动作,存在工作强度大、工作环境恶劣等问题,容易导致司机疲劳且易引发职业病。随着远程操控技术的普及,世界各国港口纷纷打造不同作业模式的自动化集装箱码头,将岸桥司机转移到环境舒适的远程控制中心,以降低岸桥司机工作强度,提高岸桥作业效率。为了适应自动化港口建设的需要,我国诸多集装箱码头着力于传统岸桥的自动化远程控制改造;但受限于传统岸桥(单小车岸桥)的性能及其与自动化作业流程的不兼容,改造后的岸桥在作业效率方面的表现欠佳。本文提出提升子系统性能、优化自动化作业流程等传统岸桥自动化远程控制改造优化方案,以期提升岸桥自动化作业能力。
1 优化子系统
增加子系统是传统岸桥自动化远程控制改造的途径之一,这些子系统包括船型扫描系统(ship profile scanning system,SPSS)、闭路电视监控(closed-circuit television,CCTV)系统、防摇防扭系统、半自动运行系统等。各子系统相互配合工作是实现岸桥自动化远程控制的基础条件;因此,有必要对子系统实施优化,以满足岸桥自动化作业要求,提升岸桥作业效率。
1.1 增強CCTV系统功能
CCTV系统的主要功能是:通过在岸桥各部位配置摄像头,实现岸桥司机对大车运行、作业贝位、吊具全局、俯仰机构运行轨迹及集卡车道的远程监控。司机在远程操控着箱动作时存在视觉盲区,在距离过远的情况下,还存在无法看清锁孔等问题,给着箱作业造成安全隐患。据统计,岸桥司机平均着箱耗时为36.5 s,仍有较大的提升空间。为了提升岸桥司机远程操控着箱能力,在海侧和陆侧理货室上方增设监控摄像头,使司机可以从侧面观察着箱情况;同时,在CCTV系统中增设可编程逻辑控制器(programmable logic controller,PLC)Text插件和TextBar插件。PLC Text插件可以获取岸桥起升高度,CCTV高清摄像头根据起升高度自动变焦,远控操作台(remote operation service,ROS)显示器自动切换显示岸桥司机所需观察角度最佳方位的摄像头画面,并使岸桥吊具始终处于画面中合适的位置,以减少视觉盲区。TextBar插件设在ROS中央显示器下方(见图1),主要显示岸桥起升高度、开闭锁状态等信息,从而极大地方便岸桥司机着箱操作。实践证明,CCTV系统功能的增强对缩短岸桥司机着箱耗时效果显著(平均着箱耗时缩短至25.0 s),并且有利于增强岸桥司机对码头作业现场的掌控力,从而保障码头作业安全。
1.2 部署三维集卡对位系统
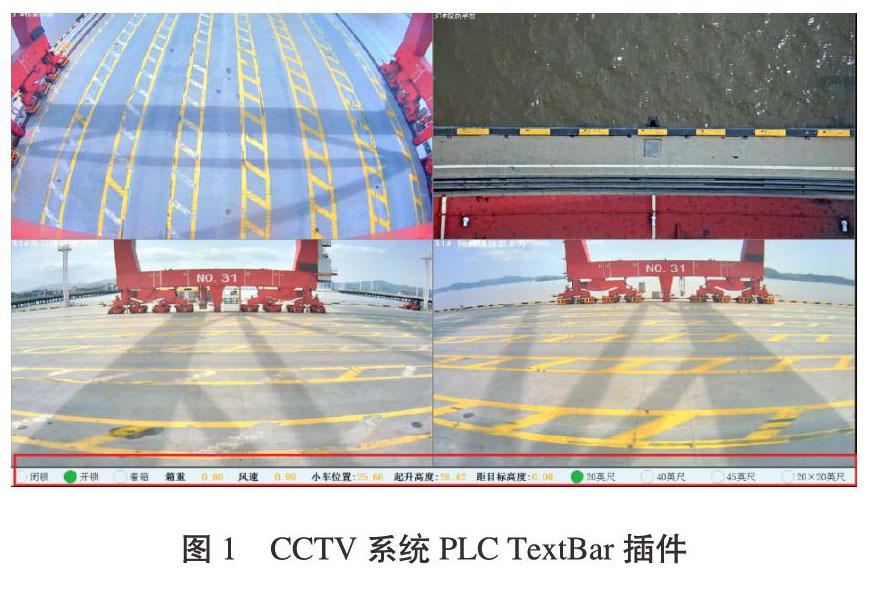
在传统港口作业模式下,岸桥陆侧着箱需要由捆扎工以一根标杆为参照物配合集卡司机完成集卡引导,存在司机与捆扎工沟通不畅、集卡引导到位耗时较长等问题。集卡对位系统(chassis position-ing system,CPS)的主要功能如下:自动检测集卡和集卡上单20英尺、双20英尺、40英尺和45英尺集装箱的位置信息并上传至单机自动化控制系统,同时通过岸桥支腿两侧的显示屏向司机提示集卡方向、距离、位置等实时信息(见图2),使司机无须依靠码头现场捆扎工的指挥就可实现集卡精准停靠。在实际作业过程中,当岸桥小车从海侧回归陆侧车道上方时,若集卡未处于车道正中央位置,则会出现对箱不准的问题。二维CPS引导集卡结束后,岸桥司机在着箱动作前可能还要微动小车才能对箱成功;相比之下,三维CPS不仅能实现集卡自动引导,还能通过采集集卡在码头的纵向位置信息实现吊具自动切换,并能通过PLC计算实际的陆侧目标位,在回归途中自动调整吊具姿态和下放导板,从而使岸桥司机可以直接操作吊具升降着箱。
统计结果显示:部署三维CPS后,集卡平均自动引导耗时从之前的11.3 s/箱缩短至8.0 s/箱,且岸桥司机远程操作一次着箱成功率达到90%以上,作业效率大幅提升。
1.3 应用陆侧自动着箱系统
岸桥司机陆侧着箱耗时过长是影响岸桥自动化作业效率的症结之一。在港口装卸自动化发展的过程中,陆侧自动着箱方案(如双小车系统)的实施不仅使岸桥自动化程度大大提高,而且使岸桥作业效率明显提升。陆侧自动着箱系统的应用,尤其是该系统在起升高度超过40 m的单小车岸桥上的应用,是当前港口自动化研究的前沿课题。岸桥陆侧自动着箱系统在利用SPSS和三维CPS的基础上引入陆侧目标检测系统,在陆侧建立三维目标模型;此外,系统配备防摇防扭系统,以控制吊具倾转,实现吊具精准对箱和着箱。在岸桥陆侧自动着箱作业过程中,吊具从起升到着箱成功的中途不再停滞,整个过程较传统着箱模式缩短1个作业循环的时间(5 s)。陆侧自动着箱的一次着箱成功率至少需要达到95%,否则会影响岸桥整体作业效率。
2 优化作业流程
集装箱港口自动化改造离不开配套码头作业模式的转变,例如,需要配备码头智能理货系统、码头智能配载系统、码头作业面调度策略等。岸桥自动化远程控制改造不只是局部改造,而是整个作业链的改造。只有岸桥硬件配置与软件系统兼容,才能实现岸桥作业智能化,达到提升岸桥作业效率的目的。
2.1 智能理货系统流程
智能理货系统是对传统人工理货方式的科技创新,其应用智能化模块、信号转换模块、验残模块等实现信息采集、储存和传输,省去人工理货方式中核对箱号、输入箱号、查验箱体残损、确认贝位等环节,实现集装箱装卸实况的可追溯性。智能理货系统流程会影响岸桥自动化作业连贯性和作业效率。以目前应用较为广泛的光学字符识别(optical character recognition,OCR)系统为例,岸桥从码头操作系统获取任务的速度取决于OCR系统识别速度,而OCR系统在昼夜交替时和极端天气下存在识别成功率下降的问题(识别成功率不到80%)。为了解决该问题,需要优化OCR系统的相机拍照逻辑和识别算法:在拍照逻辑方面,通过多次拍照取优和调用相邻相机一起拍照并校验的方法,成功调用清晰度和识别度最高的相片;在识别算法方面,通过加入深度自学习识别算法,将识别成功率提高至95%。目前,加入人工智能技术的OCR系统的识别成功率达到98%,并具备实时监控、自动识别、错误拦截、自动传输等功能,完美匹配岸桥自动化作业流程,从而有效提升岸桥作业效率。
2.2 作业面策略应用
在码头作业现场,通常只有重点作业路才配备数量充足的集卡,并且存在集卡等待岸桥的现象,而其他作业路则需要岸桥等待集卡,从而严重影响作业效率。集装箱码头自动化改造通常配套引入用于水平运输作业的自动导引车、跨运车或无人集卡,同样存在集卡调度不平衡的问题。水平运输多路共享和资源池调度等作业面策略的应用有助于使参与码头作业的集卡服务于多条作业路,实现资源池中所有装卸指令共享,从而获得最优作业效率。作业面策略的实施过程实质上是智能选择的过程:通过码头动态指令分发,水平运输设备完成不同岸桥作业路边装边卸作业,控制员对水平运输设备作业的控制力减弱。作业面策略在解放水平运输设备生产力的同时大大提升岸桥作业效率,保障岸桥自动化作业流畅。
3 结束语
自动化港口建设是未来港口发展的必然趋势,自动化码头是智能港口建设的起点;因此,如何提高码头自动化作业效率逐渐成为港口行业研究的热门课题。实际上,码头作业效率的提升不仅仅涉及岸桥、场桥等设备单机作业效率,同时还与整个自动化作业链息息相关;因此,码头设备远程控制系统及流程优化对提升码头作业效率至关重要。
(编辑:曹莉琼 收稿日期:2020-04-22)
猜你喜欢
浙江人大(2021年11期)2021-12-12
集装箱化(2021年5期)2021-08-03
阅读(快乐英语高年级)(2021年11期)2021-03-08
集装箱化(2020年10期)2020-12-21
装备维修技术(2020年3期)2020-11-20
集装箱化(2020年5期)2020-07-26
集装箱化(2020年7期)2020-06-20
小星星·阅读100分(高年级)(2017年2期)2017-02-24
集装箱化(2016年8期)2016-10-20
作文与考试·小学高年级版(2016年7期)2016-05-14