
旋翼无人机载激光雷达在农村不动产权籍调查中的应用
2020-08-03 12:46:48吉绪发
测绘通报 2020年7期
吉绪发
(广东南方数码科技股份有限公司,广东 广州 510665)
当前,我国正大力推动农村权籍调查工作,工作时间紧迫,且对调查时的土地所有权界址点精度要求较高。按地籍调查规程要求,土地使用权明显界址点精度不低于一级:中误差不大于5 cm,允许误差不大于10 cm。隐蔽界址点精度不低于二级:中误差不大于7.5 cm,允许误差不大于15 cm。按传统的解析法进行全野外调绘,虽然能够保证界址点测量的精度,但天气是否良好、村民是否长期外出,都会明显影响测量工作效率。目前一些地方在农村权籍调查工作的地籍测量中使用了新的技术以提高测量工作效率,如采用吊车搭载三维激光雷达扫描仪或使用无人机进行倾斜摄影测量。通过吊车搭载三维激光雷达扫描仪进行地籍测量,克服了传统地籍测量中工作效率低、劳动强度大等问题,提高了地籍成图与权属调查的效率[1];较传统地籍测量采集数据自动化程度高、测量精确度高,且具有可重复性和便于计算机及软件处理等优势[2]。另外,无人机倾斜摄影测量技术应用于农村地籍调查能够解决大部分房屋界址点的测量且大部分测量结果精度甚至优于解析法[3]。结合前人的研究成果[4-5],并考虑到倾斜模型受遮挡影响较大,受遮挡区域会产生拉花、变形及内业采集不准确或无法采集,需进行外业补测等问题[6],并且机载激光雷达技术在工程应用中具有可快速获取高密度三维激光点云及高清影像,快速处理获得的DEM、DOM及DLG等高精度地理信息数据,无需布设大量外业控制点,无需大量外业调绘,自动化程度高,数据生产周期短等优点[7],本文提出将无人机(旋翼机)载激光雷达采集点云数据的技术应用于农村不动产权籍调查,并对其精度进行验证。
1 关键技术
1.1 旋翼无人机载激光雷达测量技术原理
机载激光雷达技术是集激光测距技术、计算机技术、高精度动态载体姿态测量技术和高精度动态全球定位系统差分定位技术于一身的摄影测量领域中的新兴技术。激光测距技术是通过激光器向地面目标发射电磁波信号,以实现高精度测距的目的,如量测距离、角度、速度等。在现代测量领域中,便捷性和相对精确性使其在传统的测量工作中扮演着极为重要的角色,是新型测量手段的基础,从以往使用反射棱镜作为定位测距仪系统发展到现在不需要合作目标作定位的激光测距系统[8]。全球定位系统的出现则是解决了作为载体的机器在全球海陆空的定位问题。计算机技术和载体姿态测量技术的集成使机器高精度动态载体姿态的测定成为可能[9]。三者成熟的技术共同构成了机载激光雷达测距技术的基础。
机载激光雷达技术在数据层面上分两部分,即通过测距测角及GPS动态差分定位能够获取精确的高分辨率数字地面模型及地面物体的三维坐标,通过随机携带的CCD相机获取对应地区的影像信息[10];再经过计算机相应的软件对激光点云数据进行处理(滤波、分类、检查),形成相应区域的点云图像,并将其与实际对应地区的影像信息相结合,从而进行对应地区信息的采集。
机载激光原理如图1所示。机载激光雷达系统以飞机作为观测平台,结合激光器的高度、激光扫描角度、从GPS得到的激光器位置和从INS得到的激光发射方向,可准确计算出每一个地面光斑的三维坐标[11]。
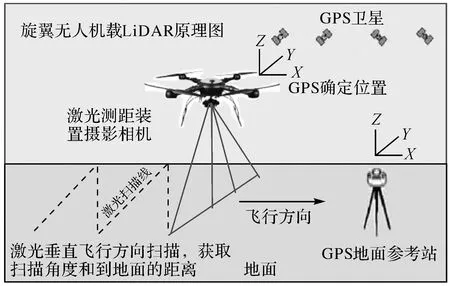
图1 旋翼无人机载激光雷达测量原理
机载激光雷达系统采用极坐标定位原理确定地面三维坐标信息。则矢量终点,即扫描点的点位坐标,等于矢量起点与矢量长度和方向确定的坐标分量之和[12]。其确定地面点三维坐标的数学本质:对于一空间向量,已知其模和其在物方坐标空间方向,若已知向量起点的空间坐标,则该向量的另一端点的坐标可唯一确定。
随着无人机低空遥感技术的兴起,针对其需求而研制的无人机LiDAR系统也大量出现,由于受重量和体积的限制,无人机LiDAR系统的精度有限,在数据采集和处理时需要增加外业工作量以保证精度[13]。
1.2 三维立体数据采集技术
三维立体数据采集是指利用一系列传感器或测量设备对三维立体待测物体进行空间三维信息数据采集。搭配机载的激光雷达测量技术,获取的为点云数据信息。
基于点云数据的三维立体采集,采用南方三维立体数据采集软件(iData_3D),它是以iData数据工厂为平台基础、拥有完全自主知识产权的一款三维立体测图系统,利用倾斜三维模型或海量点云数据进行DLG的采编、制图、入库,可广泛应用于地形测量、城镇或农村地籍、电力、管线、市政等行业。利用iData_3D可以秒级加载海量点云数据,通过点云捕捉、快捷键设置等功能,可提高点云的采集准确度。同时,软件提供点云过滤、裁剪盒等工具,可用于快速采集道路边线及市政部件,消除影响作业效率的高层建筑或植被,提升点云立采效率。软件可直接生产PDB格式的矢量数据,与ArcGIS数据库无缝衔接,并可分发为CASS制图标准的DWG格式文件,保证图形、属性、精度无损转换。
2 某村庄权籍调查地籍测量实施
本次试验选取了房屋类型比较典型的区域,涉及7个村庄,约1.5 km2。涵盖房屋结构复杂、附属结构多、房屋规整的有个别区域有遮挡、房屋不规整的遮挡严重等实际作业中可能涉及的多种类型。
2.1 激光雷达地籍测量技术流程
激光雷达测量应用于地籍测量的技术流程如图2所示。
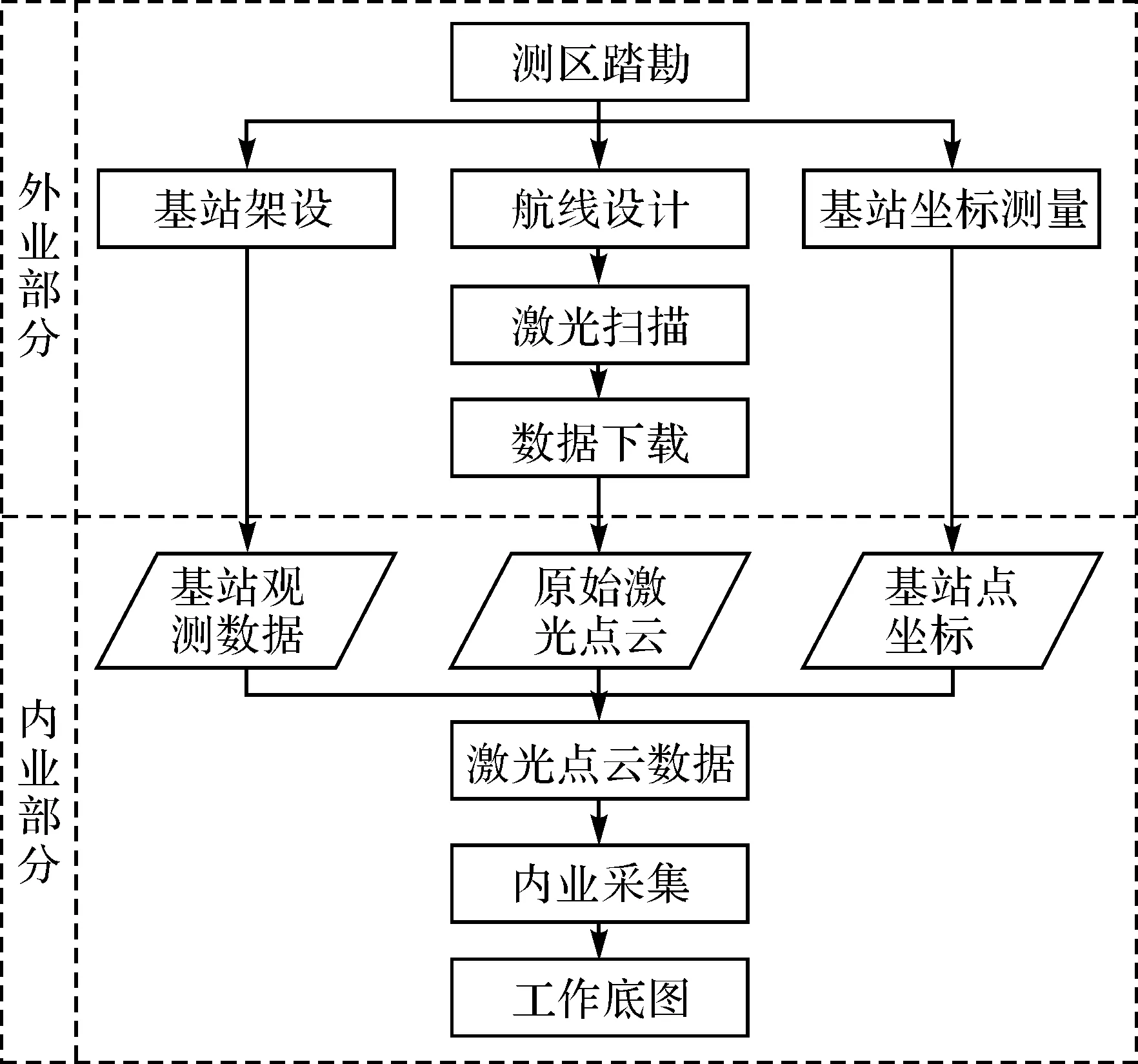
图2 应用激光雷达测量的地籍测量技术流程
(1)确定需要勘探的测区,收集测区资料,设计飞行器航线和地面基站架设位置。
(2)装载激光雷达测量系统的飞行器由测区外飞至测区上空,按项目勘察设计的飞行路线进行激光扫描采集数据,以明显地物点设置的基站辅助修正飞行路线,采集完成后检查采集路线与采集区域是否完整,如有遗漏则及时补测,以保证数据完整性。
(3)下载激光扫描采集的数据,形成原始的激光点云数据;下载基站的观测数据;收集记录基站的坐标数据。三者共同构成激光点云数据。
(4)针对形成的激光点云数据进行数据预处理,去除误差,从而形成可用的工作底图。
2.2 旋翼无人机载激光雷达测量系统组成
本文采用南方测绘六旋翼无人机载激光雷达移动测量系统SZT-R250对试验区域进行航飞,获取矢量宗地及房屋的激光点云数据。
旋翼无人机载激光雷达测量系统分为4个部分:
(1)用于确定激光雷达信号的参考点空间位置的GPS发射器,确定无人机在测区的飞行路线和覆盖范围。
(2)用于确定扫描装置的相对空间位置姿态参数的姿态测量装置,保证扫描装置位于正确的位置上对测区进行扫描。
(3)用于测定激光雷达发射的参考点到地面激光脚点间距离的激光测距仪,形成相应的原始数据。
(4)成像装置,一般用于对扫描区域进行影像上的记录,为后续的数据处理提供必要的参考信息。
2.3 外业数据采集
(1)测区踏勘:在航飞之前对测区进行踏勘,了解测区范围及测区内的地物地形情况。
(2)基站架设及基站坐标测量:应用激光雷达进行飞行作业时,需要在测区地面明显地物点处布设基站,根据测区的大小、地形概况确定基站布设的距离和数量。一般情况下在地面布设1~3个基站,间距为30~50 km,在航摄过程中基站用于同步接收GPS信号,并测定动态差分GPS的定位结果供数据解算时使用[14]。
(3)航线设计及激光雷达扫描:根据测区的地物地形情况设定覆盖扫描区域的航线,按照测区勘探设计的采集路线用激光雷达扫描进行数据采集。本次案例中设定的无人机航线飞行数据为航高65 m;飞行速度8 m/s;航线间距60 m;采用交叉航线航飞。
2.4 内业数据处理
(1)基站观测数据:在测区明显地物特征点设置的基站所收集的飞行器观测数据信息。
(2)原始激光点云:飞行器在使用激光扫描测区时所收集到的地面脚点反射的数据。
(3)基站点坐标:在测区明显地物特征点设置的基站的坐标信息。
(4)激光点云数据解算:使用POS数据及基于数据解算软件解算转换的基站点坐标,预处理原始激光点云并进行差分解算,通过精度检测检验高程中误差和平面中误差,获取精确的激光点云数据。解算软件可将航带边缘精度稍差的点云数据自动分类,删除冗余数据。
(5)内业采集处理:内业采用iData_3D软件基于点云数据采集,成果数据库采用通用的地理信息空间数据标准,结合iData平台下的骨架线符号化技术,实现数据库内动态采编、入库、出图一体化作业,最终形成工作底图。
2.5 地籍测量成果输出
采用模板机制输出成果,通过自主研发的iData报表插件,编辑word模板实现自定义效果,简单高效、快速出表,可定制化程度高。
2.6 旋翼无人机载激光雷达测量技术精度分析
点位精度检测:采用92个外业实测点,与倾斜模型同一点位进行平面坐标对比,倾斜模型的点位中误差为4.4 cm,粗差率不超过5%(见表1)。
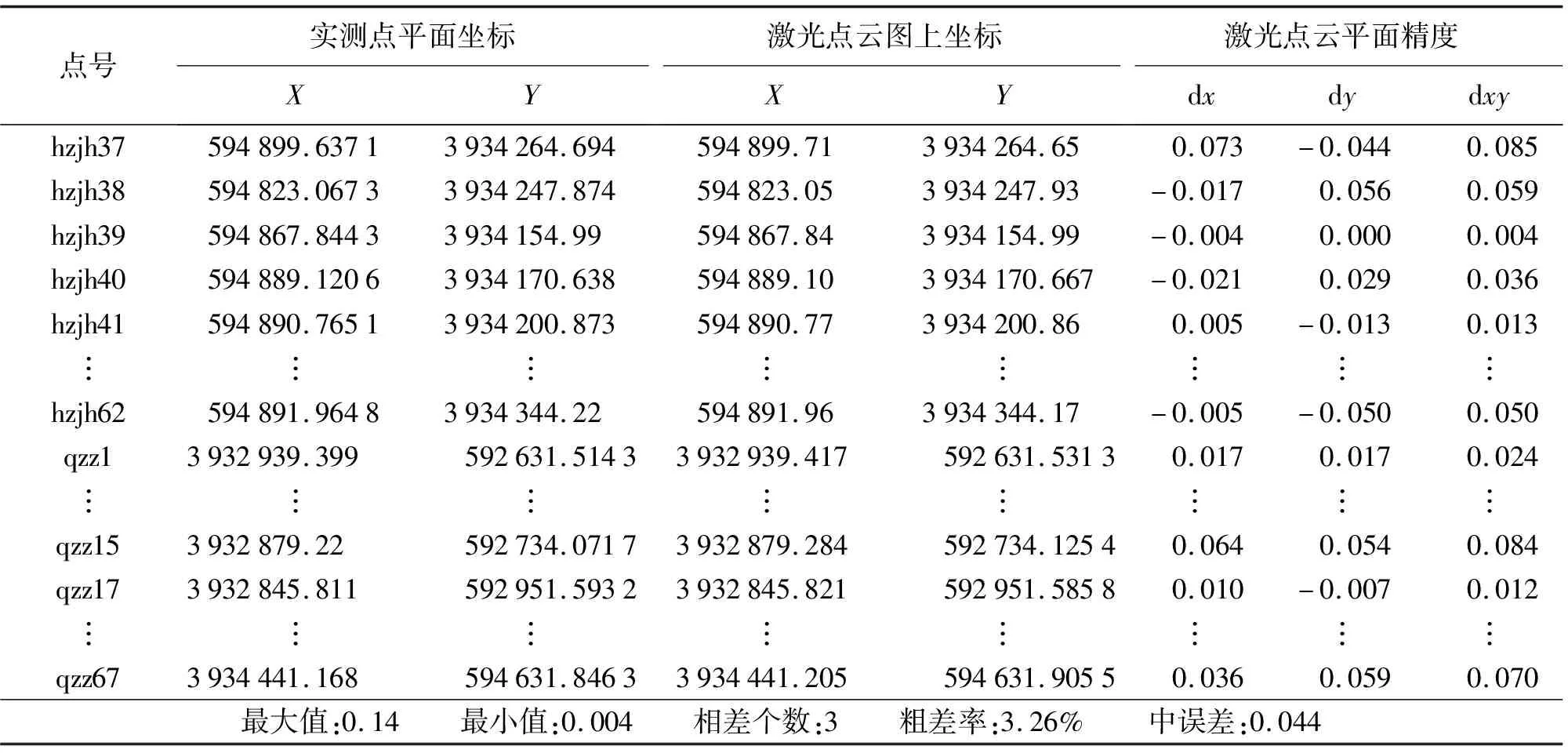
表1 点位精度 m
边长精度检测:采用50个外业实测边长,对比倾斜模型的对应边长,剔除粗差后倾斜模型的边长中误差为4.1 cm,粗差率不超限(见表2)。

表2 边长精度 m
激光雷达的作业方式不是每天都能满负荷航飞,其平均航飞效率为1.1 km2/d。机载激光雷达测量技术主要是采用主动测量方式对测量区域的实际情况进行测量,不受可见光的影响,因此能够穿透薄云、薄雾,其在使用过程中一般不受天气、自然环境限制,对外界环境的依赖程度较低且能在夜晚开展工作,不受时间上的影响。将该技术应用于植被丰富的地区,其测量结果不受植被的影响,具有较强穿透力,能够直接测量植被下的房屋区域等,适合植被情况复杂的农村区域[15]。本文只体现白天作业的效率。航飞完成之后,经过高集成化解算即可开始内业采集工序,如图3所示。

图3 激光点云工序比例
3 结 语
相较于传统全过程外业调查测量,利用旋翼无人机搭载激光雷达进行扫描,在相同时间段内,无人机测量比人工测量所获取的信息量大,内外业工作量小,处理周期短,效率高,不受可见光影响限制,充分利用了旋翼无人机的强机动性。其机载激光雷达具有小型化和轻量化的特征,灵活便捷,适应狭小空间飞行,对起降场地要求简单,操作人员可实时调整旋翼无人机的位置和航线,通过快速建立模型保证激光雷达扫描得到的数据的完整性。
在实地进行无人机激光雷达扫描时,基于iData_3D软件进行地物激光点云采集,辅以适度的人工补充作业,可有效减少工作量,解决复杂地物的测量。在激光测量中可以从任意高度对房屋取切断面,房屋边界以矢量点的形式呈现可以更直观地判断墙面位置,减少判断过程。墙面没有凸凹,采集精度更高。在遮挡区域,由于激光点云具有多回波特性,房屋的墙面可完整表现且周边不会产生变形。总体可以达到以下效果:①可通过房屋高度判断层数;②房屋附属柱子可通过多角度观察进行判断;③能够判断不封闭阳台、飘楼、柱廊、露台等房屋附属结构,无法区分封闭的阳台、廊等房屋附属与主房,无法判断屋顶材质,临时搭建房屋,需外业核查。
通过iData_3D软件对收集的点云数据进行预处理,去除冗杂数据,加载海量的点云数据,实现对点云数据的编辑和管理。通过自主iData_3D软件可以生成DSM、使用多种快速采集房屋工具(直角绘房、直线绘房、房棱绘房)、智能化自动提取轮廓线(智能绘房)、批量提取高程点、自动提取等高线、模型切割,从而高效率、智能化地实现点云数据的内业处理,形成工作底图。
通过案例进行精度验证,在同等时间内利用旋翼无人机载激光雷达测量得到的点云数据的精度符合要求。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
山东煤炭科技(2022年6期)2022-07-14 03:10:40
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
汽车观察(2021年8期)2021-09-01 10:12:41
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
河北地质(2021年4期)2021-03-08 01:59:14
中国铁道科学(2019年5期)2019-10-19 07:55:14
电子制作(2019年9期)2019-05-30 09:41:48
中国交通信息化(2019年1期)2019-03-26 06:43:46
测绘通报(2018年10期)2018-11-02 10:07:28
