再入飞行器低误码率数字化遥测系统设计
2020-08-03 01:50闫新峰邝浩欣王伟伟
计算机测量与控制 2020年7期
闫新峰,邝浩欣,金 文,苏 伟,王伟伟
(北京航天长征飞行器研究所,北京 100076)
0 引言
再入飞行器遥测系统主要完成飞行器飞行过程中力、热等环境参数以及飞行器工作状态的采集、编码和存储,完成外系统的图像、串口等数字量数据的接收和存储,同时完成系统的在线自检、供配电控制等功能[1-2]。
遥测方式有无线遥测和存储回收遥测两种,与无线遥测相比,存储回收遥测具有可获取更为完整的飞行全程数据、数据误码率低等优点[3],是高速再入飞行器主要遥测方式之一。传统存储器容量一般为4 GB,未采用纠错编码,随着再入飞行器测量信号种类不断增多,尤其是高速大容量图像数据测量需求的提出,传统存储器已无法满足大容量、低误码率的需求[4-6]。同时,再入飞行器落地时会产品大冲击、二次碰撞、摩擦发热等恶劣环境,对存储器的回收防护也提出了更高的要求[7]。
传统供配电方式一般为地面供配电,采用PLC技术[8]和电磁继电器[9],由地面发送模拟控制信号,实现飞行器上的供配电、转电等功能,该方式地面设备多、操作复杂,可靠性低[10]。
飞行器测试时或发射前一般在地面采用人工判读的方式判断系统是否工作正常,该方式效率不高,不够智能,且容易出现误判[9-10]。
本文提出的再入飞行器遥测系统,克服了现有技术的上述不足,提高了存储器存储容量和可靠性,降低存储器误码率,简化地面供配电测试设备及操作,节约研制成本和人力成本,提高了飞行器智能化和测试性水平。
1 系统总体方案设计
再入飞行器遥测系统采用存储器硬回收方式,随再入飞行器落地,回收后将存储器中数据读出,对数据进行处理和分析,作为评估飞行试验的依据。
系统由采编存储设备、供配电设备以及传感器变换器组成,系统组成框图如图1所示。

图1 再入飞行器遥测系统组成框图
其中采编存储设备包括采编器、接口控制器和存储器。采编器接收传感器变换器输出的电压模拟量信号,进行采集、编码、组帧,并发送给存储器进行存储。接口控制器接收外系统的图像、串口等数字量数据,重新组帧后发送给存储器进行存储;接收地面测控系统的控制指令并转发给存储器,接收存储器的存储数据及状态信息并转发给地面测控系统,接收存储器的状态信息并转发给数字配电器。存储器接收采编器输出的采编数据和接口控制器输出的备份数据,进行存储;接收经接口控制器转发的地面控制指令,进行相应的实时监测、擦除、下载、停止下载等操作。
供配电设备包括数字配电器、二次电源和锂电池。数字配电器通过1553B总线接口接收地面测控系统控制指令,包括自检、转电、关机等指令,完成供配电控制、自检以及状态测量等功能。二次电源接收数字配电器的28 V供电输入,转换为二次电源,为存储器、传感器变换器等设备供电。锂电池为再入飞行器遥测系统提供一次28 V电源。
传感器变换器测量再入飞行器上的力学、热学等环境参数,并将参数值转换为电压模拟量输出给采编器。
2 关键技术及解决途径
2.1 大容量、低误码率、高可靠存储回收设计
本遥测系统采用存储硬回收方案,存储器为本系统的核心设备,大容量低误码率可靠存储技术以及落地后的结构回收防护技术是存储器设计的关键和难点技术。
2.1.1 大容量冗余备份存储设计
存储器需要存储再入飞行器环境参数及工作状态,还要存储外系统的图像及串口等备份数据。
存储器由3个独立的存储模块组成,每个存储模块有两片容量为16 GB的NAND Flash芯片,如图2所示。存储模块1和2用来存储再入飞行器环境参数及工作状态,为了提高数据存储可靠性,存储模块1和2中的四片Flash芯片同步记录,互为备份。存储模块3用于存储外系统图像及串口数据,两片Flash芯片串行记录,先记录第一片,第一片记录满之后开始记录第二片,存储容量扩展为32 GB。根据存储数据的数据速率计算,存储器可连续存储9 h数据。
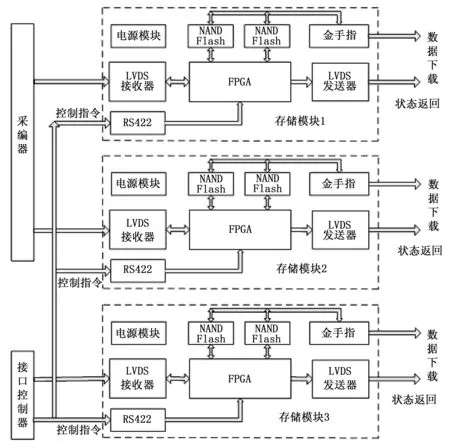
图2 存储器组成框图
存储模块1、存储模块2和存储模块3组成相同,均包括两块NAND Flash芯片、FPGA单元、RS422接口芯片、金手指、LVDS接收器、LVDS发送器以及电源模块。
FPGA单元接收来自LVDS接收器的数据,如果上电30 s内未接收到地面测试系统的“下载”或“擦除”指令,则将接收的数据同时写入两块NAND Flash芯片中,否则根据控制指令对两块NAND Flash芯片进行擦除或下载操作,将下载的数据通过LVDS发送器向外输出。
RS422接口芯片用于接收接口控制器转发的地面测试系统控制指令,并发送给FPGA单元。一个字节的帧头和一个字节的指令构成一个指令字,指令字重复三遍组成一个控制指令帧。
电源模块为存储模块上的各个器件供电。
金手指用于将两块NAND Flash芯片的管脚引出,在存储模块上电源模块、FPGA单元或LVDS发送器或其他相关器件失效时,能够从外部对NAND Flash芯片进行写入、擦除或下载操作。
2.1.2 基于ECC纠错编码的低误码率设计
NAND Flash芯片在进行编程时存在比特翻转的情况,而且容量越大,比特翻转的概率越大,为了减小数据存储误码率,采用了ECC校验算法,存储器误码率可降低至10-10。
在数据存储时,使用汉明编码产生模块,产生ECC校验码,每512 Byte有效数据产生3 Byte的校验码,并存储在每页的用户空闲区域,每页共存储8 KByte有效数据,因此共产生16组校验码,数据存储过程如图3所示。

图3 采用ECC校验算法的数据存储示意图
数据下载过程中,首先从Flash芯片的每页中读出有效数据,同时从每页的用户空闲区域读出ECC校验码,根据汉明码产生模块产生新的ECC校验码,比特纠错定位模块将新生成的ECC校验码和读出的校验码进行对比,如果有误码,确定出误码位置。为了加快下载速度,设计了乒乓缓存模块,在乒乓缓存模块中根据误码位置对误码进行纠正。数据读取过程如图4所示。

图4 采用ECC校验算法的数据读取示意图
2.1.3 可靠性设计
存储器响应的指令有“下载”、“停止下载”,“擦除”3个指令。为了防止再入飞行器在飞行过程中,存储器由于受到干扰导致存储器数据误擦除,以及意外断电重启导致数据丢失,进行了以下可靠性设计:
1)存储器每次上电后等待30 s,只在30 s内响应“下载”、“擦除”指令,在30 s内如果接收到擦除指令,则擦除存储器数据,同时将当前写地址复位为存储器首地址,如果接收到下载指令,则下载数据,擦除或下载完成后存储器进入空闲状态;
2)在30 s之内如果没有接收到任何指令,30 s后自动进入记录状态,存储器从当前存储的记录地址顺序记录,能够存储并实时更新当前记录地址,当前记录地址在存储器断电后不消失,断电重启后能够从上次存储位置自动进行续存,不会将上次数据覆盖。进入记录状态后,不再接收任何指令。存储器记满后,则不再记录,防止覆盖以往数据。
2.1.4 抗高冲击结构回收防护设计
存储器结构设计采用了复合防护结构,钛合金内筒加外部高强度钢壳体的防护方式,在内桶和外壳间设置非金属隔离层,触地方向采用整体半球头,壳体内部采用灌封工艺,在保证一定强度的同时减轻内部重量,实现了落地冲击和二次撞击时,导致的防护结构变形、引出电缆被切断或产生火焰等严酷条件下存储器数据能够正常回读。
2.2 基于1553B总线的数字化供配电设计
2.2.1 数字配电器方案设计
数字配电器是实现数字化供配电和在线故障诊断功能的核心设备,通过1553B总线接口接收地面测控系统发送的自检、起飞、转电、关机等指令,并实现相应操作,向地面测控系统反馈自检和转电结果,对系统工作状态进行在线测量并存储。
数字配电器由电源模块、1553B总线模块、配电模块和采集模块组成,如图5所示。

图5 数字配电器组成框图
电源模块将28 V电压转换为5 V电压,给其他模块供电。
1553B总线模块与地面测控系统进行通讯,接收地面测控系统发送的自检指令,进行自检并将自检结果反馈给地面测控系统;接收起飞指令并发送给采集模块;接收转电指令发送给配电模块;接收采集模块发送的配电输出电压和电流等参数,编帧后发送给采编器进行编帧并遥测下传;接收紧急断电指令并发送给配电模块。
配电模块在地面上电后,通过地面电源为飞行器上各用电设备供电;接收到转电指令后,切换为电池为各用电设备供电;接收到紧急断电指令后,同时断开地面电源和电池供电。
采集模块采集配电模块的供电电压、电流以及二次电源发送过来的电压,发送给1553B总线模块作为自检结果上报;接收到起飞指令时,将起飞信号转发给采编器进行遥测帧计数的清零。
2.2.2 供配电设计
供配电设计电路如图6所示,其中K1、K2、K3为固态继电器,V1、V2为二极管,核心处理器采用DSP芯片。二极管V1和V2的作用是防止地面供电或电池供电的电流倒灌。
地面测控系统首先给数字配电器供电,数字配电器加电后,其中的DSP开始工作,接通K1和K2,完成28 V配电和电池加温配电功能,遥测系统其他设备开始工作,加温电路视环境温度确定是否进行加温。
当数字配电器通过1553B接口接收到转电指令后,接通K3,保持K1接通,同时切断K2。
为了提高系统可靠性,防止DSP芯片因受到干扰导致死机或程序跑飞,继电器K1和K3具有指令保持功能。采用将DSP的控制信号输出到CPLD,由CPLD输出高电平直接控制固态继电器,即使DSP出现复位或跑飞现象,CPLD仍然能够按照内部逻辑锁定控制信号,输出高电平以保持K1和K3的接通。
当数字配电器通过1553B接口接收到关机指令后,切断K1、K2和K3,系统断电。

图6 供配电设计电路图
2.2.3 在线故障诊断设计
数字配电器接收到地面测控系统发出的自检指令后,对全系统的供电情况以及存储器工作状态进行自检,并通过1553B总线上报自检结果,地面测控系统根据自检结果,可以对故障进行诊断和快速定位,确定飞行器是否具备发射条件。
2.2.4 状态测量存储设计
在飞行器地面测试以及飞行过程中,数字配电器会对系统工作状态进行测量,测量的内容主要包括系统工作的电压电流、接收到的指令以及自检和转电结果,把这些数据打包为一个数据帧,通过两路RS422接口分别发送给存储器进行存储和地面测控系统进行在线实时状态监测。
3 试验验证
存储器参加了炮击试验,使用某型火炮,按照设定的炮击速度将存储器发射出去,撞击到按照配比要求夯实的靶标上,炮击试验后,存储器外部及内部机械结构无明显变形,灌封材料完整,存储器数据顺利读出后经判读完整正确,验证了存储器在高速侵彻靶板介质产生的大冲击环境和热环境下具有良好的防护能力。
再入飞行器遥测系统通过了温循、振动、老炼等验收试验以及冲击、湿热等鉴定试验,参加了电气系统匹配试验、电磁兼容试验等多项大型地面试验,并通过了多次飞行试验考核,飞行试验取得圆满成功,系统均工作正常,完整获取到了全程飞行试验遥测数据。
4 结束语
本文提出的大容量、低误码率、高可靠存储回收技术解决了长时间大容量存储问题,与无线遥测相比,误码率降低了4个数量级,实现了高冲击条件下遥测数据的可靠回收。提出的数字化供配电技术、在线故障诊断技术等,解决了传统供配电方式中存在的测试设备复杂、岗位多、可靠性低等问题,简化了地面测试,节约研制成本,解决了飞行器发射前故障诊断实时性要求高的问题,提高了飞行器智能化和测试性水平。该系统已经应用于某再入飞行器,经过了飞行试验考核,具有良好的应用前景和推广价值。
猜你喜欢
建材发展导向(2022年3期)2022-04-19
建材发展导向(2022年5期)2022-04-18
探测与控制学报(2022年1期)2022-03-21
计算机测量与控制(2021年9期)2021-10-08
锦绣·中旬刊(2021年9期)2021-08-31
北京航空航天大学学报(2021年6期)2021-07-20
现代装饰·理论(2016年7期)2016-11-02
企业文化·中旬刊(2015年10期)2016-03-09
环球时报(2014-06-18)2014-06-18
计算机世界(2009年27期)2009-07-30