
互联网地图在汽车能量管理系统中的应用研究
2020-07-31 09:31孙和成
现代信息科技 2020年4期
摘 要:及时而准确地提供前方道路实时路况及坡度、曲率信息,可以有效帮助插电式混合动力汽车选择最合适的动力系统运行模式和能量回收强度,最大限度地优化整个行程的系统效率。文章提出的智能能量管理系统基于互联网地图为车辆控制系统实时提供有效地图信息,提升车辆的燃油经济性,并提出了在云端路网中实现路线匹配的方法,从而由云端下发与指定路线相匹配的坡度和曲率信息,可以有效解决车载地图模块中缺少坡度、曲率的问题,以及坡度、曲率数据的鲜度问题,可为相关应用与研究提供参考。
关键词:插电式混合动力汽车;互联网地图;智能能量管理;路线匹配;坡度;曲率
中图分类号:P289;TP273 文献标识码:A 文章编号:2096-4706(2020)04-0150-03
Abstract:Providing real-time road condition,slope and curvature information in time and accurately can effectively help the plug-in hybrid vehicle choose the most appropriate power system operation mode and energy recovery intensity,and optimize the system efficiency of the whole journey to the maximum extent. The intelligent energy management system proposed in this paper is just based on the internet map to provide real-time effective map information for the vehicle control system and improve the fuel economy of the vehicle. This paper also proposes a method to realize route matching in the cloud road network,so that the slope and curvature information matching the designated route will be issued by the cloud. This scheme can effectively solve the problem of lacking slope and curvature in the vehicle map module,and also solve the freshness problem of slope and curvature data. The research results can provide reference for related application and research.
Keywords:plug in hybrid vehicle;internet map;intelligent energy management;route matching;slope;curvature
0 引 言
續航里程短、充电设备不完善、维修和保养成本高、电池价格昂贵等一系列问题依然是目前纯电动汽车发展的重要瓶颈,因此插电式混合动力汽车(Plug-in Hybrid Electric Vehicle,PHEV)逐渐成为新能源汽车的重要组成部分[1]。
PHEV将传统动力系统与纯电动动力系统有机结合在一起,既解决了纯电动汽车续航里程短的问题,又表现出了优越的节能环保能力。
由于PHEV存在多个能量源,能量管理系统自然成为PHEV的核心技术之一[2]。基于规则的能量管理系统主要依据试验数据和工程经验进行反复调试以控制阈值,容易实现,鲁棒性好,但工况适应性差[3]。基于全局优化的能量管理系统,如动态规划(Dynamic Programming,DP)算法,不仅算法复杂,而且需要预测行驶工况信息,难以用于实车控制[4]。
随着汽车智能化、网联化的发展,汽车部件及系统控制策略可以与互联网地图相结合,将实时路况、道路属性及前方转向等信息整合到PHEV能量管理系统中,大幅提升PHEV的工况适应性,改善燃油经济性[5]。
1 智能能量管理系统
对混动车主来说,在选择纯电还是混动时,总有各种各样的纠结。选择纯电模式,能耗和舒适性最佳,毫无疑问是短距离出行和有充电桩用户的第一选择。但对于中长途出行或者无充电条件的用户,纯电模式并不是最优选择。
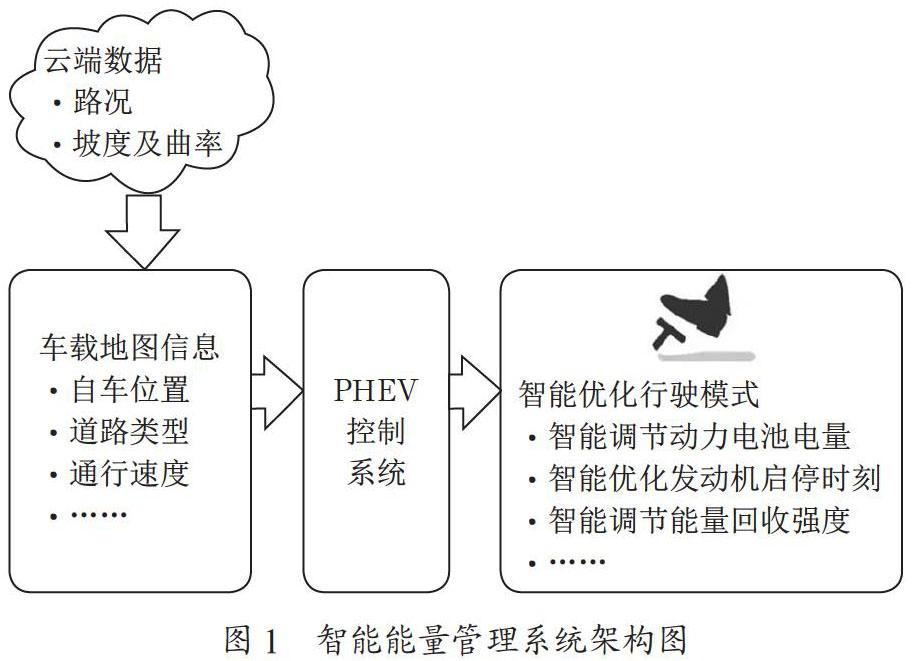
基于互联网地图的智能能量管理系统(Intelligent Energy Management System,IEMS)功能架构如图1所示。它会自动根据整个行程的里程、预计车速、坡度、曲率、拥堵等信息提前规划,调整发动机和电机的使用范围,根据整个行程信息进行用油、用电分配,实时控制电池电量,发挥系统最高效率。
比如,行驶过程中收到来自地图的前方拥堵信息,系统会在畅通路段利用发动机的高效区进行充电。虽然这一段会使得能耗偏高,但在接下来的拥堵路段,车辆能以低速、效率更高的纯电模式行驶。最终整个行程的能耗更低,同时让低速路段更加安静、平稳。
IEMS还可以根据地图信息了解前方是否有红绿灯,知道车辆有较强的减速需求时,会在此时加大能量回收强度,回收更多的能量。这时,只需要开到红绿灯前,松开油门,车辆就会在强能量回收的作用下较快减速,既符合驾驶员预期,同时也把能量存储到电池包中,代替了刹车功能,降低了能耗。
2 云端路线匹配
与IEMS相关的地图数据包括自车位置、导航状态、道路类型、实时路况、通行速度、机动点、目的地、摄像头、坡度及曲率等等。这些信息可以从不同角度帮助IEMS实现节能减排的功能。
在导航场景(用户设置了目的地)下,IEMS可以从车载地图模块中直接获取到路线详情,但其中缺少道路坡度及曲率数据。
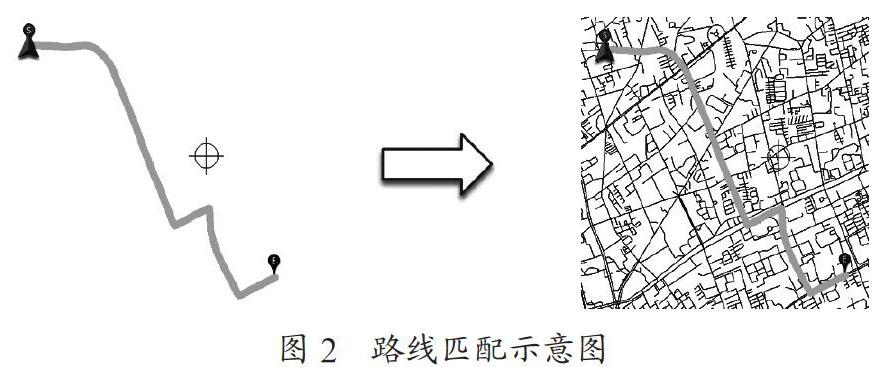
既然车载地图模块中无法直接获取到坡度和曲率,那么就从云端接收。于是,我们在云端部署了含有坡度和曲率数据的全国路网。在导航场景下,车载地图模块的路线信息被上传至云端,云端基于路线匹配算法将路线完整而准确地匹配到云端路网中,最终将云端路网中的坡度和曲率信息填充到路线中,并下发给车机。路线匹配过程如图2所示。
2.1 地图投影算法
地图投影,就是借助路网信息将一连串位置点投影到数字地图上的过程。我们所要匹配的路线就是一连串的位置点。
定义路线L={p1,p2,p3,…,pn},pi表示经纬度坐标。
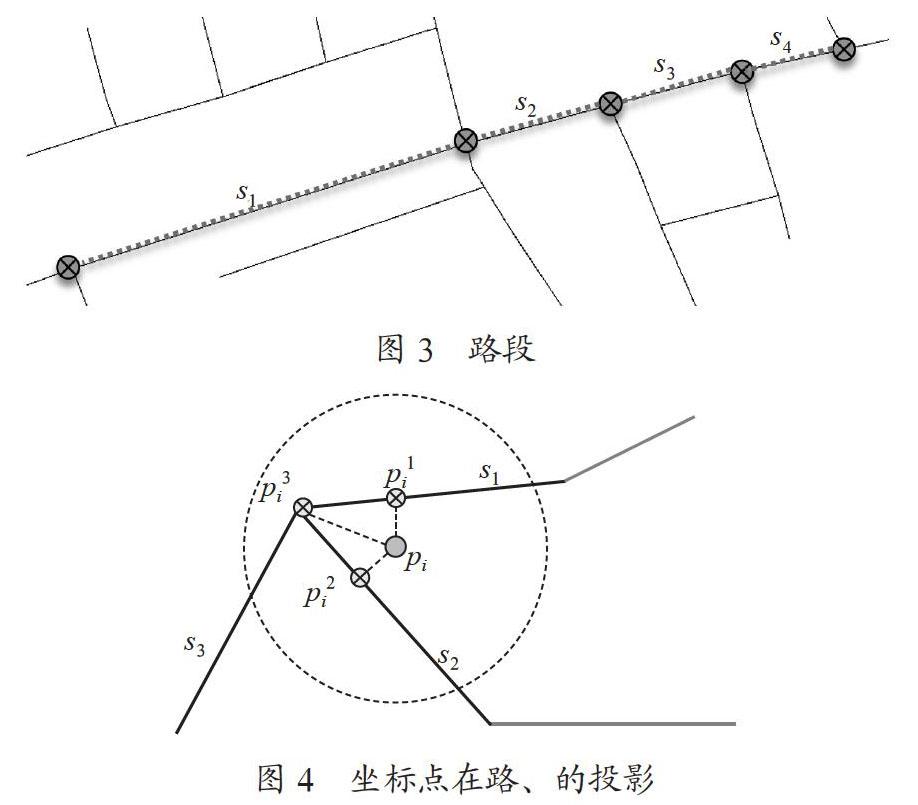
在路网中,路段表示为一条有向边,它的属性包括长度、通行方向、通行速度、起终点以及若干个形状点。图3中示意标出了s1、s2、s3及s4四条路段。
基于路线和路段的定义,地图投影算法分为三个步骤:
第一步,以坐标点pi为中心,在一定范围内筛选出候选路段集合。半径值的定义在不同的场景下要求也不同。譬如,待匹配的坐标点是GPS定位结果时,由于GPS定位精度一般在5米~10米,那么半径值就需要设置在10米以上。而本文中待匹配的坐标点本就是路网中的形状点,一般误差在1米~5米以内,所以半径值可以相对设置较小,遇到候选路段集合为空的特殊情况时,再扩大半径值。如图4所示,在以坐标点pi为中心的圆形范围内中可以选择三条路段s1、s2及s3。
第二步,根据线段投影计算出三条路段上分别对应的投影点pi1、pi2及pi3。将一个位置点pi投影到不同路段上的多个点的集合,显然是不合理的。我们需要将一个位置点准确地投影到本该属于它的路段上。
第三步,通过观察概率和传递概率来选择最可能路段。观察概率依赖于路网中的几何信息,它是基于坐标点pi和投影点pij之间的距离而计算出的匹配概率。也就是说,在多个投影点中,与坐标点pi距离最近的投影点的观察概率最大。
由于观察概率没有考虑坐标点的拓扑关系,通常会导致错误的匹配结果。如图5所示,如果只考虑观察概率,则pi对应的点是pi1,而实际应该是pi2。因为根据pi前一个坐标点pi-1的位置关系,很容易将pi1排除。
2.2 道路属性匹配
在一般情况下,基于路网几何信息和拓扑关系,地图投影算法都可以准确地将路线匹配到路网上。但是,在一些特殊情况下,两条路段的几何信息和拓扑关系完全是一致的,此时我们需要进一步借助道路属性信息来过滤掉不可能的候选路段。
如图6所示,路线附近同时存在两条路段,它们的几何信息和拓扑关系非常相似,但是它们的道路属性明显存在差异。
前面提到,我们从车载地图模块获取到的路线详情里是含有道路属性的。也就是说,每一个坐标点都有对应的属性。借助这样的信息,我们就可以很容易过滤掉不可能的候选路线。
道路属性包括车道数、道路等级、道路名称等。比如图6中,如果坐标点pi对应的道路属性是三车道主路,那么我们就可以轻松过滤掉候选路段中的辅路。
3 结 论
综上所述,基于互联网地图的智能能量管理系统可以有效利用实时路况、坡度、曲率等信息预估车速变化,更合理地控制车辆在纯电、行车充电、并联模式中切换,更智能地选择最合适的动力系统运行模式和能量回收强度。典型场景的实测数据显示,目前的智能能量管理系统能够有效节省能耗15%以上。
除了路况、红绿灯、坡度、曲率等数据,互联网地图中还有很多其他有价值的数据值得挖掘。比如,IEMS可以自动判断目的地附近是否有用户常去的充电站。如有,则可以在接近目的地时更多地切换成纯电模式。比如,IEMS可以自动识别前方颠簸道路,提前降速,增加能量回收强度。
基于互联网地图的智能能量管理系统一定可以利用越来越丰富的地图数据,让车辆更节能,让天空更蔚蓝。
参考文献:
[1] 装备工业司.关于2016-2020年新能源汽车推广应用财政支持政策的通知 [R/OL].(2015-04-29).http://www.miit.gov.cn/n1146285/n1146352/n3054355/n3057585/n3057589/c3617158/content.html.
[2] 苏岭,曾育平,秦大同.插电式混合动力汽车能量管理策略研究现状和发展趋势 [J].重慶大学学报,2017,40(2):10-15.
[3] Anbaran S A,Idris N R N,Jannati M,et al. Rule-based supervisory control of split-parallel hybrid electric vehicle [C]// Energy Conversion (CENCON),2014 IEEE Conference on. IEEE,2014:7-12.
[4] Zhou W,Yang L,Cai Y,et al. Dynamic Programming for New Energy Vehicles Based on Their Work Modes Part I:Electric Vehicles and Hybrid Electric Vehicles [J].Journal of Power Sources,2018,406:151-166.
[5] 王旭,杜光乾,黄勇,等.考虑交通信息的PHEV电量消耗轨迹预测与跟随算法研究 [J].重庆理工大学学报(自然科学),2018,32(8):1-7.
作者简介:孙和成(1984-),男,汉族,江苏盐城人,硕士,研究方向:互联网地图。
猜你喜欢
装备维修技术(2021年52期)2021-07-03
考试与评价·高二版(2020年4期)2020-09-10
福建基础教育研究(2020年3期)2020-05-28
东方教育(2017年19期)2017-12-05
读写算·教研版(2016年19期)2017-04-17
中国人口·资源与环境(2016年11期)2017-02-17
南水北调与水利科技(2016年6期)2017-01-06
绿色科技(2016年20期)2016-12-27
成才之路(2016年16期)2016-07-11
湖南师范大学学报·自然科学版(2016年3期)2016-06-25
