煤矿井下无极绳连续牵引车控制系统的设计研究
2020-07-31 17:54穆春林
机械管理开发 2020年6期
穆春林
(阳煤集团南庄公司, 山西 阳泉 045000)
引言
运输设备是煤矿开采过程中必不可少的重要设备之一,运输设备运行的稳定性直接影响着煤矿开采的质量和效率[1]。对于现代化的矿井而言,运输设备的技术和水平能够在很大程度上反映整个煤矿的现代化水平。当前阶段,无极绳连续牵引车是煤矿运输中比较先进的运输设备,在实践应用过程中表现出了明显的优势[2-3]。比如,使整个运输环节变得更加简化、运输可靠性显著提升、需要的工作人员数量减少并且作业强度降低等[4-5]。但是由于煤矿井下作业环境相对比较复杂,无极绳连续牵引车在实践应用中也表现出了一些问题,比如在控制方面有待进一步提升[6]。基于此,本文针对煤矿井下无极绳连续牵引车的控制系统进行了分析和研究,以期能够在一定程度上提升无极绳连续牵引车的控制水平。
1 无极绳连续牵引车总体概述
1.1 无极绳连续牵引车总体结构与布置
如图1 所示为煤矿井下无极绳连续牵引车的构成及其布置情况,从图中可以看出,煤矿井下无极绳连续牵引车由多个部分构成。各个部分通过钢丝绳进行连接,再结合一些辅助装置,比如控制按钮以及操作开关等控制设备,就可以利用该装置进行两个方向的连续运输。煤矿井下的一些运输辅助装置如人车、矿车、材料车以及平板车等,都可以与梭车进行直接相连。连接方式主要可以分为两种,分别为硬连接和软连接。通过无极绳连续牵引车能够实现两个方向上的远距离运输。

图1 无极绳连续牵引车总体结构与布置
牵引绞车是无极绳连续牵引车中的重要构成部分,其作用主要在于对钢丝绳进行固定和存储。通过牵引绞车对钢丝绳进行控制,进而实现物品的运输。需要运输的距离直接决定了需要储备的钢丝绳长度。因此,条件允许的情况下,应该尽可能多地储备钢丝绳。钢丝绳的张紧力主要通过张紧装置进行控制,为了保证运输安全,钢丝绳必须具有一定的张紧力。钢丝绳在长时间的工作过程中,受到运输距离长、坡度较大等因素影响,钢丝绳弹性模量以及伸缩量等都会出现一定程度变化,这时候就可以通过张紧装置来控制钢丝绳的张力,确保系统安全。
1.2 无极绳连续牵引车应用中存在的缺陷
一般情况下,煤矿井下的轨道相对比较复杂,存在很多起伏变化,矿车在不平稳的轨道上运输时必然会出现颠簸现象。一旦出现颠簸现象,矿车就会短暂地与轨道分离。在重力作用下,矿车又会与轨道接触,在接触过程中会与轨道产生冲击。这种冲击一方面对设备的稳定性造成影响,同时还会影响矿车的运行速度,进而对整个运输系统的效率造成负面影响。当矿车的运输速度较大时,这种现象表现得尤为明显。现阶段,无极绳连续牵引车都是将制动装置设置在牵引绞车附近,通过对卷筒进行制动以达到对运输设备进行制动的目的。当牵引绞车运行速度较慢时对制动控制方面的要求不是非常高。但是一旦牵引绞车运行速度较快时,为了保证无极绳连续牵引车的运行安全,就必须对自动过程进行精确控制。
2 无极绳连续牵引车控制策略
本研究中拟使用阻抗控制策略来完成无极绳连续牵引车的控制,阻抗控制又可以进一步划分成为基于力的阻抗控制和基于位置的阻抗控制。矿车在正常运行时,矿车与轨道之间的接触力大小能够很好地反映矿车的运行状态,这种控制模式通常具有更好的控制效果。基于位置的阻抗控制模式则能够更好地对矿车的位置进行控制,但是这种模式与基于力的阻抗控制模式相比较而言精度稍微较低。综合考虑两种模式的控制策略,本文选择基于力的阻抗控制策略对煤矿井下无极绳连续牵引车进行控制。
如图2 所示为基于力的阻抗控制结构框图,这种模式的阻抗控制策略是将阻抗控制器放置在力控制器的外面,在整个内环控制器中将力的控制作为主要控制手段。在矿车底部设置力传感器和位置传感器,通过这两个传感器可以实时获取矿车运行过程中的位置Xr以及矿车底部与轨道的接触力,在内环力控制器中将传感器获取的数据经过阻抗控制器处理后的量作为输入量,通过内环控制器实现矿车与轨道之间力的跟踪控制。

图2 基于力的阻抗控制策略结构框图
考虑到矿车在运行时始终与轨道相互接触,因此在设计控制系统时需要将矿车与轨道两者之间的相互影响、相互作用考虑在内。选用最经典的PID 控制器来完成相关的控制系统设计工作。矿车在运行过程中位置传感器会实时检测矿车的实际位置,并将其与理想的位置进行比较分析,会产生一个位置偏差ΔX,经过阻抗控制器进行处理后会产生一个力的控制量,将该参数输入到内环PID 控制系统中从而实现无极绳连续牵引车的控制。另外,矿车底部也会安装力传感器对接触力进行实时检测,作为控制系统的反馈量。
3 无极绳连续牵引车控制系统硬件设计
3.1 控制系统基本工作原理
位于矿车底部的力传感器会收集得到相关的力数据,采集得到的数据信息经过A/D 转换模块进行转换后将结果输入到DSP 控制器中,经过对数据的分析和处理,计算得到矿车的自身重量以及震动产生的加速力,认为这两个力的合力就是矿车与轨道之间的接触力。另外,利用外部的传感器对矿车的运行速度进行测量和计算,并将矿车的运行平均速度输入到DSP 控制器中。控制器通过接触力计算得到矿车理想的运行速度值,并将其与真实的速度进行比较分析,进而得到一个控制量。如果需要加速,直接利用驱动电机的转速调整实现矿车运行速度的提升控制。如果需要减速,则需要启动制动控制。
无极绳连续牵引车在正常工作时,会对制动缸进行加压处理,经过加压后缸内的压力会得到显著提升,进而将内部的弹簧慢慢压缩,正常运行过程中制动缸处于一种抬起的状态。一旦控制系统判断需要对牵引车进行制动时,系统一方面会对外界发出牵引车超速的警示信号。同时会输出一个制动控制信号,将制动缸内的压力卸载。压力卸载以后制动缸内的弹簧失去外力作用,逐渐恢复伸长,会使得制动片与轨道发生接触,达到对牵引车进行制动的目的。如图3 所示为牵引车制动控制基本流程图。
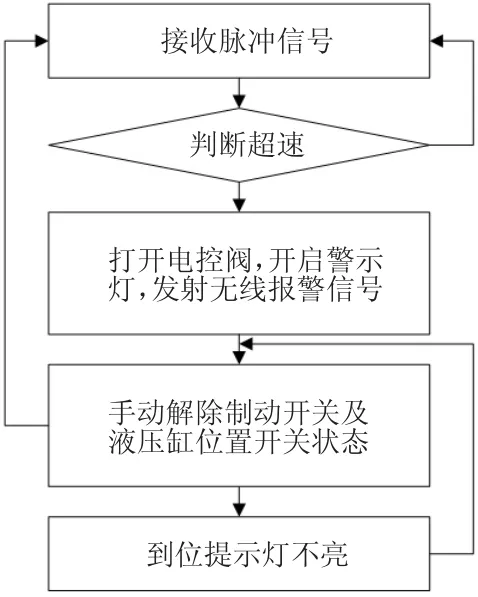
图3 牵引车制动控制基本流程图
3.2 DSP 控制器型号的选择
对无极绳连续牵引车进行控制时牵涉到大量的算法,这对控制器性能提出了较高的要求。如果控制器性能高,则计算速度快,整个控制系统的反应时间短。保证运输系统的安全以及稳定是进行控制的根本目的,本文在综合考虑多方面因素的基础上选用TMS320F2812 型号的DSP 控制器,将其作为整个控制系统的控制核心。如下页图4 所示为TMS320F2812型号DSP 控制器内部功能结构示意图。
3.3 测速装置
对牵引车的实时速度进行准确测量是实现精确控制的基础和前提。本系统中利用霍尔传感器对牵引车的速度进行实时准确测量。具体测量方法可以概述如下:将霍尔传感器安装在绞车底部,然后在绞车车轮轮辐部位粘贴磁铁,需要说明的是磁铁不得安装在金属部分。绞车在运行过程中,霍尔传感器固定不动,位于车轮轮辐的磁铁会随着绞车车轮一起转动,进而周期性地切割霍尔传感器。通过对切割频率进行统计能够计算得到绞车车轮的旋转速度。再通过相关的理论计算公式,可以得到绞车车轮表面的线速度,该速度就是钢丝绳的运行速度。
4 结论
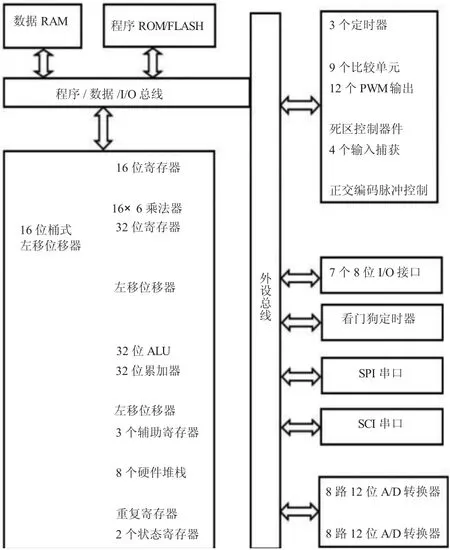
图4 TMS320F2812 型号DSP 控制器内部功能结构示意图
当前阶段,无极绳连续牵引车以其显著的优势在煤矿中得到了显著的应用。但是煤矿井下作业环境复杂,如何对其运行速度进行精确控制以保证运输系统的稳定和安全非常关键。基于阻抗控制策略的无极绳连续牵引车的速度控制系统,可以结合实际情况对牵引车的运行速度进行精确控制,确保了牵引车运行的安全性和稳定性。
猜你喜欢
装备制造技术(2020年3期)2020-12-25
宝藏(2020年4期)2020-11-05
作文大王·低年级(2020年2期)2020-03-13
数学大王·低年级(2020年2期)2020-03-13
机械管理开发(2020年1期)2020-02-17
幽默大师(2019年5期)2019-05-14
中国设备工程(2017年23期)2017-01-20
汽车实用技术(2015年8期)2015-12-26
军事历史(1986年4期)1986-08-21