舰船辐射噪声听觉节奏的时变响度特征提取
2020-07-28 03:18韩雪朴胜春付金山
哈尔滨工程大学学报 2020年4期
韩雪,朴胜春,付金山
(1.哈尔滨工程大学 水声技术重点实验室,黑龙江 哈尔滨 150001;2.海洋信息获取与安全工信部重点实验室(哈尔滨工程大学),黑龙江 哈尔滨 150001;3.哈尔滨工程大学 水声工程学院,黑龙江 哈尔滨 150001)
特征提取是水下目标被动识别的关键技术,是探测系统智能化的重要标志。为了得到有效稳定的识别特征,一方面,舰船辐射噪声的特征提取技术得到广泛研究[1-8];另一方面,声呐员听音判型仍然是水下目标识别不可或缺的环节[9]。声呐员在听音判型过程中会受到外界环境、心理、生理等因素的影响[10],导致识别结果存在误差,因此,研究声呐员听音判型特征提取过程具有重要意义。响度、音调、音色是人类用来描述声音的三要素[11]。在心理声学领域,建立了心理声学参数计算模型。王娜等[12-15]验证了心理声学参数可以作为识别不同舰船辐射噪声信号的有效特征,但是所提方法没有考虑舰船辐射噪声自身的特点。阳雄等[16-18]结合舰船辐射噪声自身的特点提出舰船辐射噪声听觉特征,忽略了舰船辐射噪声在心理声学上的特点。
本文结合舰船辐射噪声在听觉上具有“节奏感”的特点,模拟声呐员听音判型过程,利用目前较为典型的Zwicker和Fastl与Glasberg和Moore时变响度模型对不同调制模式下的信号进行时变响度特征提取,在时变响度特征的基础上提出节拍响度变化量特征。对仿真目标和实测海上目标进行特征提取,分析说明本文提出的节拍响度变化量特征可以较好地识别舰船辐射噪声信号。
1 舰船辐射噪声节拍响度变化量特征提取
1.1 舰船辐射噪声的节奏信号建模
舰船辐射噪声听上去往往具有鲜明的“节奏”。声呐员在听音时先对接收到的舰船辐射噪声进行放大、滤波来提高目标的信噪比再对目标进行识别,声呐员听音判型处理流程如图1所示。

图1 声呐员听音判型处理流程Fig.1 The processing flow of sonar member audio judgment
听觉上的“节奏”表现为调制,本文选用陶笃纯[19]的调制模式仿真方法,设调制函数为m(t),带有“节奏”的舰船辐射噪声模型为:
s(t)=m(t)sx(t)
(1)
1.2 时变响度计算
时变响度模型与稳态响度模型不同,考虑了声音随时间的变化[20]。目前最为典型的时变响度模型分别是Zwicker和Fastl与Glasberg和Moore提出的[21]。Zwicker和Fastl模型只使用了一个时间常量,在模型中利用时间后掩蔽效应来描述响度动态行为,而Glasberg和Moore则为了矫正幅值调制声音的响度应用了多个时间常量。
瞬时响度描述的是非常短的时间内的听觉神经测量。该值的计算与稳态响度模型中的整体响度计算类似,不同的是与时间变量有关,而稳态响度模型与时间变量无关。
舰船辐射噪声的“节奏感”是噪声强度随时间有规律起伏引起的,因此舰船辐射噪声实际上是非稳态信号,利用时变响度模型提取舰船辐射噪声更为准确。为了叙述方便,将Zwicker和Fastl时变模型响度简称为Zwicker时变响度,将Glasberg和Moore时变模型简称为Moore时变响度。
图2~4给出了不同调制频带、四叶不同调制模式下的仿真信号功率谱、Zwicker响度、Moore响度时频图。为了能较好地与响度时频图相比较,功率谱时频图的分析帧长设为1 ms。图中仿真3秒的数据信号的第1 s与第3 s为背景环境噪声,第2 s为舰船地震波调制信号,信噪比为30 dB,这里用高斯白噪声来模拟海洋环境噪声。图2中信号的调制模式为四叶非均匀模式Ⅰ,载频为400~800 Hz。为了说明响度时频图对低频信号有更好地提取效果,图3中信号的载频设为1~100 Hz,调制模式不变。图4中信号为“节奏”更加密集的信号,调制模式设为均匀模式,载频为400~800 Hz。为叙述简便,将以上信号分别称为信号1、信号2和信号3。

图2 信号1的时频图Fig.2 The time-frequency diagram of signal 1

图3 信号2的时频图Fig.3 The time-frequency diagram of signal 2
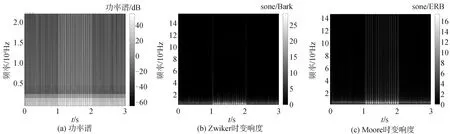
图4 信号3的时频图Fig.4 The time-frequency diagram of signal 3
从图2(a)可知,功率谱时频图中功率谱分布较分散,很难检测噪声和信号所在的时段。从图2(b)、(c)中可以看到,Zwicker时变响度和Moore时变响度能反映舰船辐射噪声的节奏特征,与功率谱时频图相比能量分布较集中,可看到噪声和信号所在的时段,及信号的能量强弱分布。这是因为响度模型考虑了人耳的频域掩蔽效应,峰值大的特征响度将峰值小的特征响度“淹没”,而Moore响度时频图的频率分辨率比Zwiker响度时频图的频率分辨率更高。
从图3(a)可以看到,功率谱时频图很难检测到舰船辐射噪声信号。而从图3(b)、(c)中可以看到,当信号的频带在低频段时,仍然可以清晰地看到被调制的舰船辐射噪声信号及能量分布,同时,Zwiker时变特征响度在低频处特征性的峰值较大,这与人耳的真实滤波特性存在差异。Moore响度时频图虽然在低频峰值不大,但是也可以检测到舰船辐射噪声信号,并且比Zwiker响度时频图能够更好地抑制噪声。
通过图4的仿真信号发现,环境噪声和被调制的舰船辐射噪声信号听起来较为相似,均匀模式的强脉冲分布较密集,而经过滤波后的噪声在幅度上也有起伏,因此给听音信号检测带来干扰。从图4(a)可知功率谱时频图频率分辨率较低,很难检测到调制噪声信号。从图4(b)和(c)中可知,响度时频图中仍然清晰地看到舰船辐射噪声信号所在的时段以及噪声时段,并且舰船辐射噪声节奏信号类型也较明显,而Moore响度时频图相比Zwiker频率分辨率更高,能更好地检测信号。
由以上对比可知,响度时频图相比功率谱时频图可以更好地检测被调制的舰船辐射噪声信号,而Moore响度时频图比Zwiker响度时频图能更准确地反映人的主观感受,并且Moore响度时频图比Zwiker响度时频图的频率分辨率更高能量更加集中。
1.3 节拍响度变化量特征提取算法
由于舰船辐射噪声信号是时变的,节拍声能量最强处和能量最弱处不仅存在能量大小的差异,而且其功率谱结构也有所变化,节拍从强到弱过程中某些频率功率增大,某些频率功率减小,这也是造成人耳感知音色不同的重要原因[17],而时变响度可以反映节拍强弱处的主观感受。从本文分析可知,Moore时变响度比Zwiker时变响度能更好地描述舰船辐射噪声的时变特征,利用Moore时变响度对节拍响度变化量特征进行提取,提出节拍响度变化量特征提取算法。
将时变响度的凸点对应的时刻称为H时刻,将响度的凹点对应的时刻称为L时刻。H时刻和L时刻由瞬时响度的响度的局部极大值和瞬时响度的局部极小值确定,确定方式为:
(2)
(3)

利用H时刻和L时刻所对应的Moore瞬时特征响度的局部极大值LIS,max(ti,fc)和Moore瞬时特征响度的局部极小值LIS,min(tj,fc)表征舰船辐射噪声节奏强弱的特征。为了特征稳定和减小估计方差,累计后H时刻和L时刻的瞬时响度为:
(4)
(5)
式中N和M分别为ti和tj对应的时刻个数。
定义节拍响度变化量为:
(6)
式中max[·]为取最大值运算。
从式(6)可以看到,所提出的特征不仅考虑了信号的频率信息的,而且考虑了信号的时间信息,同时考虑了信号的整体响度信息。
2 节拍响度变化量特征提取算法仿真分析
本文仿真2类目标,假设2类信号均为四叶调制,第1类信号为非均匀调制模式Ⅰ,第2类为均匀调制模式,载频在355~891 Hz。对2类信号进行节拍响度变化量特征提取。经研究,事件请求代理(event repuest broker,ERB)间隔的选取对特征提取影响不大,为了减小运算量,本文选取的ERB间隔为2,得到20维节拍响度变化量特征参数,如图5、6所示。图5(a)和图6(a)为2类信号响度局部极大值时刻和响度局部极小值时刻所对应的瞬时特征响度分布图。图5(b)和图6(b)为提取出的节拍响度变化量特征。
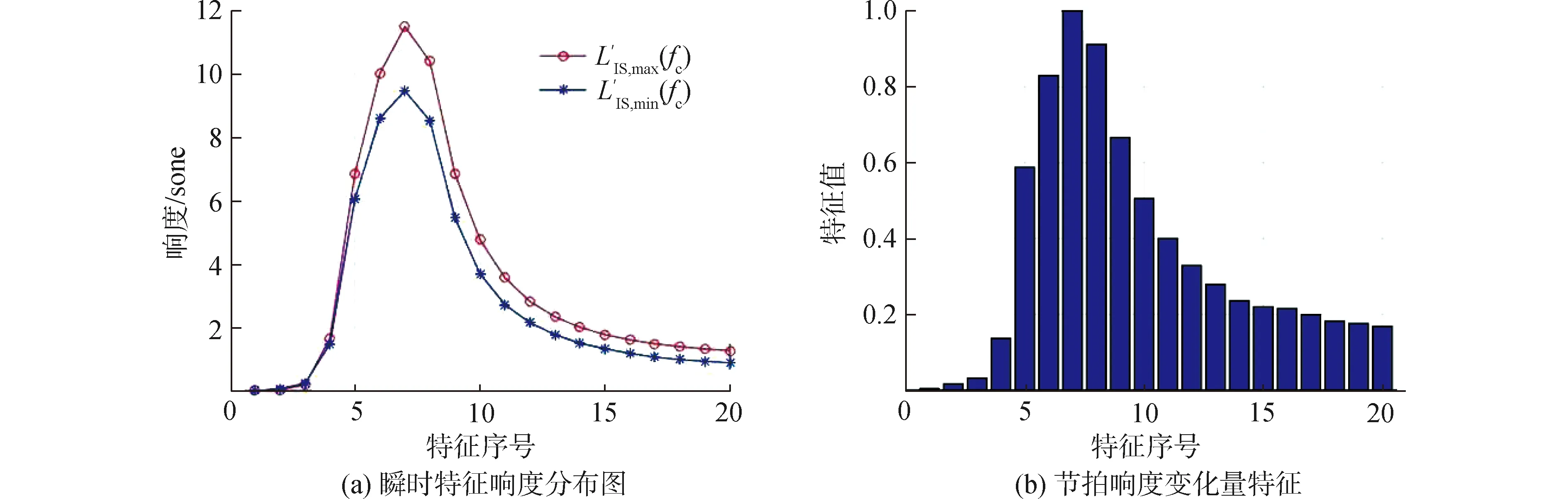
图5 第1类目标Fig.5 The first kind target
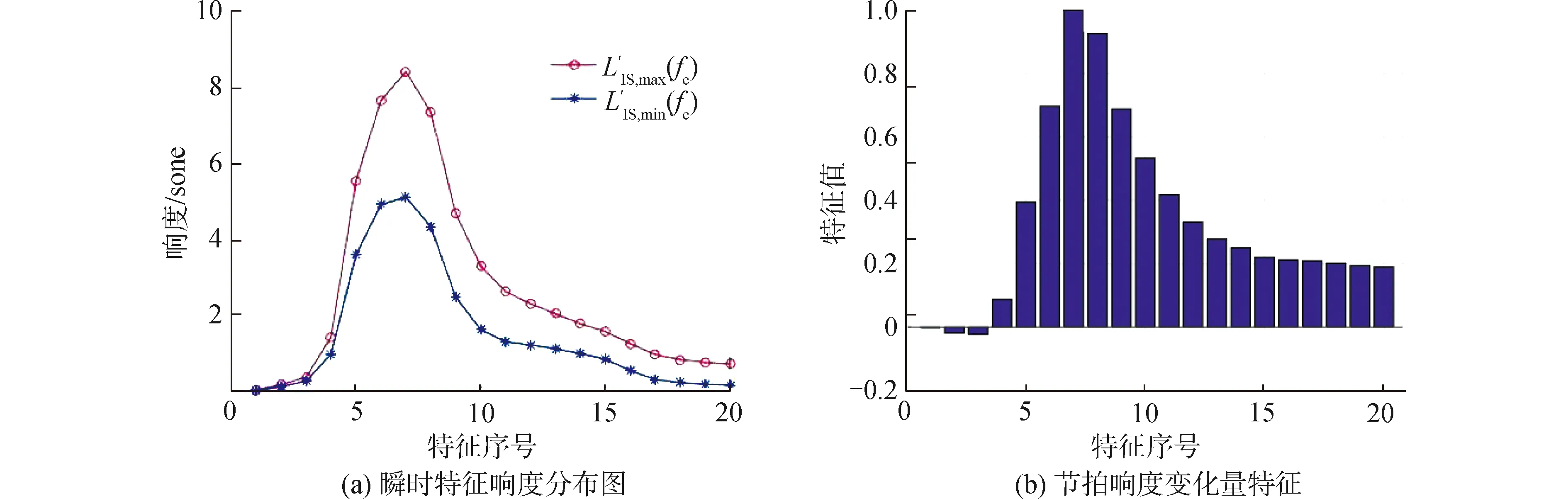
图6 第2类目标Fig.6 The second kind target
从图6(a)可以看到,响度局部极大值时刻所对应的瞬时特征响度分布与响度局部极小值时刻所对应的瞬时特征响度分布大体上是一致的,但在第12~15个特征频带内响度值变化趋势差别较大,这是因为舰船辐射噪声的节拍能量不同导致瞬时特征响度不同的原因,这一点从图7(a)中也可以看出。2类信号虽然在同一频带上,在听音上具有相似的音色,瞬时特征响度分布类似,但是瞬时响度特征差值是不同的。
从图6(b)和图7(b)对比可知,2类信号第7维和第8维特征值较接近,其他维度的特征值都有明显的区别。可见,提取出的节拍响度变化量特征可以作为区分舰船辐射噪声的有效特征。
为了更客观地对比不同特征的识别效果,利用支持向量机对上述2类目标进行识别,为了说明所提出的节拍响度变化量特征的有效性,对信号提取了Moore稳态特征响度作为对比。
节拍响度变化量特征所用的样本长度为1 s信号,而对于稳态特征响度考虑其适用特点,样本长度取0.05 s。每种特征,2类目标各有100个样本。随机抽取两类信号的全部样本的1/2作为训练集,其余1/2作为测试集,输入支持向量机进行识别。识别结果如表1所示。
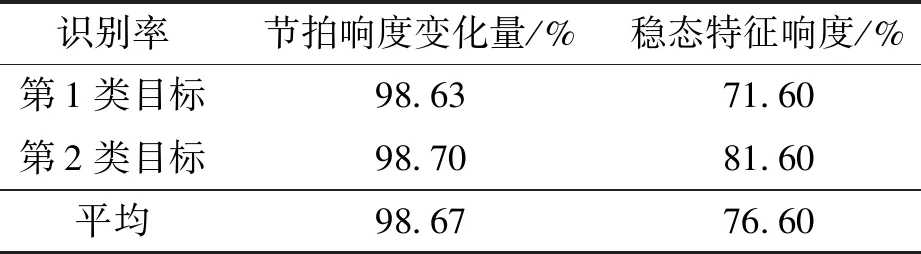
表1 目标分类结果Table 1 The results of simulation targets classification
从表1可以看到,2类目标的节拍响度变化量特征的识别率均达到90%以上,而稳态响度特征的识别率较节拍响度变化量特征的识别率低,这是因为信号的载频较窄,提取的2类目标稳态响度特征区别不大,而节拍响度变化量利用了不同时刻特征响度不同的特点很好地区分出了两类目标。
3 实验结果与分析
对海上实际数据进行特征提取,目标A和目标B的滤波频带为355~891 Hz,目标C的滤波频带为562~1 120 Hz。分别提取3类目标的节拍响度变化量特征和Moore稳态特征响度输入支持向量机进行识别。每1 s求取信号节拍响度变化量特征,每0.05 s求取稳态特征响度。样本个数如表2所示。3类目标特征的均值分布如图7所示。
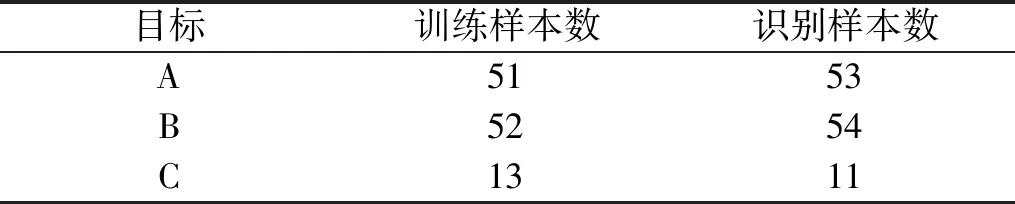
表2 提取出3类目标用于训练和识别的样本数Table 2 The number of samples for training and recognition of three kinds of targets
从图7(a)可以看到,3类目标节拍响度变化量特征差别较大。目标A的节拍响度变化量特征均值的最大值在第6维,在高频带即从第12维特征值起节拍响度变化量均值较大,而目标B的节拍响度变化量特征均值在第5维最大,在高频带节拍响度变化量均值是3类目标中最大的,而目标C的节拍响度变化量均值在第7维最大,并且在高频带节拍响度变化量是3类目标最小的。
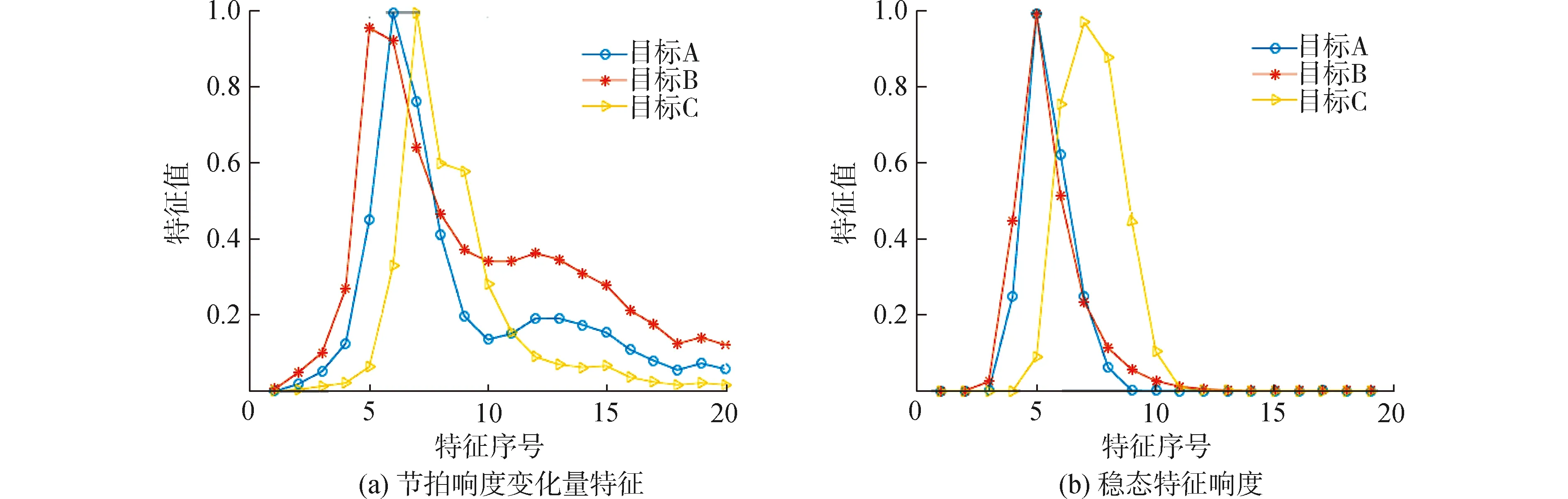
图7 3类目标特征的均值分布Fig.7 The distribution map of the average values of the three different targets
从图7(b)可以看到,目标C的稳态特征响度与目标A和目标B的稳态特征响度差别较大,这是因为目标C所在的频带与前2类目标不同的原因,而对于具有相同调制频带的目标A和目标B,2类目标信号的稳态特征响度较接近。
从识别率结果来看,利用节拍响度变化量进行识别,3类目标的识别率均达到了100%,而利用稳态特征响度进行识别目标A的识别率为96%,其他2类目标的识别率为100%,可见稳态响度特征会对相同频带信号的识别带来干扰,而所提出的节拍响度变化量特征可以很好地区分此类目标。从平均识别率来看,时变响度变化量的识别率高出稳态特征响度识别率约2%。
4 结论
1)利用时变响度模型提取信号相比功率谱提取信号结果能量分布更集中,检测效果更好。
2)Moore响度时频图比Zwicker图能更准确地反映人的主观感受,频率分辨率更高能量更加集中。
3)所提出的节拍响度变化量特征可以作为识别舰船辐射噪声的有效特征。
4)当信号的载频相似而调制模式不同时,利用节拍响度变化量特征可以很好地区分不同目标。
猜你喜欢
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
煤气与热力(2021年4期)2021-06-09
听力学及言语疾病杂志(2020年2期)2020-05-20
中华戏曲(2020年1期)2020-02-12
阅读与作文(英语初中版)(2019年11期)2019-09-10
软件(2017年9期)2018-03-02
演艺科技(2017年8期)2017-09-25
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27