FM G载荷地面试观测导行跟踪系统的设计与实现∗
2020-07-28 04:42:12陈垂裕林佳本白先勇邓元勇黄郭晶晶
天文学报 2020年4期
陈垂裕 林佳本 白先勇 邓元勇黄 宇 郭晶晶†
(1中国科学院国家天文台太阳活动重点实验室北京100101)
(2中国科学院大学北京100049)
(3中国科学院紫金山天文台南京210023)
1 引言
先进天基太阳天文台(Advanced Space-based Solar Observatory,ASO-S)卫星是中国科学院空间科学战略性先导科技专项中第2批确定的科学实验卫星之一,卫星轨道高度为720 km,设计寿命为4 yr.ASO-S卫星旨在以太阳活动第25周峰年观测为突破口,以观测太阳上两类最剧烈的爆发现象—耀斑和日冕物质抛射以及产生它们的磁场结构作为主要科学目标,揭示磁场演化、耀斑爆发、日冕物质抛射3者之间的关系,简称“一磁两暴”,在发现和研究太阳爆发机理的同时,也为空间天气预报提供重要的理论基础[1].全日面矢量磁像仪(Full-disk vector MagnetoGraph,FMG)是ASO-S卫星的3台主载荷之一,其目标是实现整星科学目标中的“一磁”,即获取全日面矢量磁场数据.
为了对FMG进行全系统性能测试和定标试验,怀柔太阳观测基地搭建了用于FMG外场测试的地面试观测平台,如图1所示.高精度的跟踪是实现高分辨观测的基础[2],地面试观测平台需要有一套高精度跟踪系统保证联试工作的顺利开展.为实现高精度跟踪太阳,结合FMG方案阶段试观测的基本情况和观测指标,我们研制了基于全日面太阳图像处理的导行系统.在2019年1–3月、5月的两次外场试观测中,运用该导行系统进行了相关测试,分析对比了恒动跟踪与导行跟踪的精度,并利用方案阶段试观测的太阳纵向磁图,分析了跟踪精度对磁图空间分辨率的影响.

图1 FMG地面试观测平台Fig.1 Ground-based exp erimental observation platform of FMG payload
本文第2部分介绍了导行系统方案的方法原理.第3部分介绍了导行系统的软硬件设计.第4部分分析对比了恒动与导行两种条件下的跟踪精度、FMG方案阶段试观测的太阳纵向磁图并得出结论.
2 方法原理
在FMG的设计方案中,常规模式下采用积分观测,单幅图像由30 s内采集的多幅图像累加生成,除满足图像采样速率外,此过程还需要保持太阳像位置相对不变.此外,FMG还有深积分模式,需要18 min采集图像进行积分处理.利用较长时间的多帧叠加换取磁场灵敏度的提高,这就要求望远镜在观测时必须具备长时间、稳定、高精度的自动跟踪能力[3].
FMG系统以ASO-S卫星为平台,卫星的姿态变化、指向精度以及颤振等因素都会对系统的连续稳定观测产生不利影响.在太空中卫星平台的设计指向精度为0.01◦,指向稳定度为0.0005◦/s.结合磁场试观测的实际需要和测试平台的实际情况,地面试观测的跟踪精度RMS(Root Mean Square)指标为1′′/30 min.
恒动跟踪是指赤道式望远镜的赤经轴可以通过匀速转动来补偿因地球自转而产生的天体视运动[4],从而通过设定恒定转动速度后实现太阳跟踪.望远镜的轴系误差会影响恒动跟踪精度,通过对赤道仪设计指标的分析,我们认为单靠恒动跟踪难以满足外场测试的需要,需要进行高精度导行.
夜天文的导星方法与太阳导行方法有本质的区别.在夜天文的自动导星算法中,目标星点的提取和星点质心的定位是关键步骤,目标星体的识别精度和质心坐标的计算精度将直接影响最后的跟踪精度[5].夜晚星空中的星体经过光学系统后在焦平面上成像形成点状光斑,点状光斑目标的细分定位方法主要分为基于灰度和基于边缘两大类[6],星点中心定位技术实际上是利用数字图像处理中的点状光斑定位技术[7].与夜天文分布在较暗背景上的点状光斑不同,太阳是强面源像,夜天文的导星方法无法采用.太阳导行的关键步骤是对太阳图像移动量进行高精度检测,一般通过对面源像的位置定标计算偏移.面源像的位置定标是指如何标定太阳像在CCD(Charge Coupled Device)上的位置,一般是确定“中心”,这个“中心”可以是太阳像的重心或者是太阳像的圆心[8].
太阳导行有四象限探测、线阵探测器导行、面阵探测器导行等方法[9–10].随着大尺寸CCD相机的推广和计算机性能的提升,全日面图像实时处理逐渐成为提高导行精度的可行手段之一.在FMG的地面试观测平台中,首先通过全日面导行镜和大尺寸CCD相机获取可见光全日面像,其次利用算法实时计算全日面像的质心位置,然后通过与基准图像质心的偏移量控制望远镜的运动,最后实现长时间高精度的跟踪.图2是导行系统控制流程图,具体的流程为[11]:CCD相机采集首张太阳像计算质心作为基准;利用导行镜和高帧频CCD相机获取全日面像,通过GigE(Gigabit Ethernet)接口高速传输给上位机;上位机实时计算图像的太阳质心,并与基准图像的质心做比较,得到质心在赤经、赤纬方向的偏移;根据算法设定的条件进行判定,满足调整的条件后,通过TCP/IP(Transmission Control Protocol/Internet Protocol)与控制器通信;控制器发送指令信号到驱动器,驱动器根据偏移量发送脉冲信号到伺服电机进行校正.
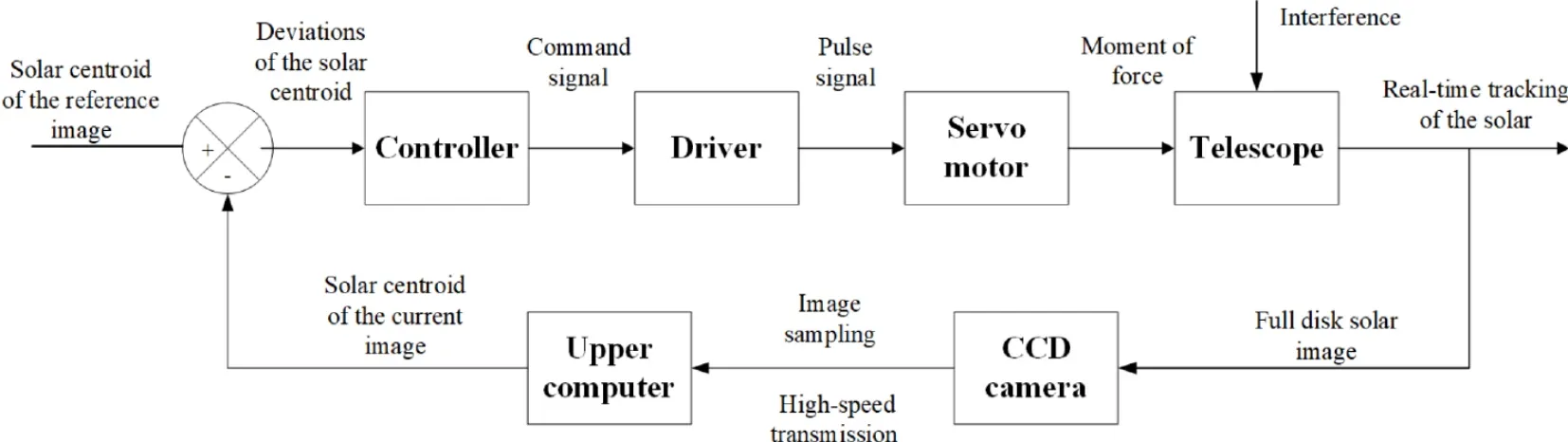
图2 导行系统控制流程图Fig.2 Control flowchart of the guiding system
3 软硬件设计
搭建用于FMG外场测试的导行系统,需要结合实际情况完成相关的硬件选型、安装和调试等工作,并将算法编写进入控制软件,通过软硬件平台结合实现导行功能.
3.1 硬件设计
本文的导行系统主要依托以下硬件开展实验:
(1)赤道仪
赤道仪采用日本西村制造所的NH-HR-02叉式单筒赤道仪,操作控制系统为制造商定制开发的Master of Telescope程序,通过上位机可以实现太阳指向和恒动跟踪.其设计指标中指向精度为10′′(RMS)(高度≽20◦),带自动导向装置的跟踪精度为5′′/10 min(RMS)(高度≽30◦).
(2)全日面导行镜
导行镜采用Vixen望远镜,主镜筒口径为100 mm,主镜口径为105 mm,焦距为1000 mm,焦比为F9.5.为了便于调整,导星镜另外安装了可调整距离的巴洛镜,口径50 mm,焦距100 mm,安装过程中可通过手动调焦.实际观测中,巴洛镜放大倍率为1.273,合成焦距为1273 mm.
(3)CCD相机
采用IMPERX公司型号为GEV-B2020 M的相机,该相机体积小,重量轻,可提供2048 pixel×2048 pixel的图像分辨率,靶面尺寸为15.15 mm×15.15 mm,标准帧率为16 fps,像素尺寸为7.4µm×7.4µm. 经测试全日面太阳像尺寸约为1600 pixel×1600 pixel,该相机满足实验要求.使用GigE接口,通过网线每秒能传输120 MB数据.
3.2 算法与软件设计
上位机程序在Visual Studio 2010平台下使用面向对象的C++语言进行开发.算法中设定了判定条件[10],只有满足判定条件的图像才会计算质心.不同的质心算法对导行方法的影响不大[12],本次导行采用平均亮度阈值法.
设全日面太阳像中有i、j两个方向,m、n分别为i、j方向像素的数量,某一点像素值为f(i,j),则像素点(i,j)处的灰度值g(i,j)为:

满足条件的全日面太阳像,首先通过大津法设定阈值T,然后通过(1)式将图像二值化.设基准图像的质心为(x0,y0),二值化后当前图像质心位置(x,y)可通过如下质心法计算:

质心偏移量d x、d y为:

实时获取图像的d x、d y,再将其转化为控制指令,就能实现导行.赤道仪仅可以依靠继电器的吸合控制两个预留接口来实现高精度导行.前期调试中,使用的方案是通过众为兴ADT-8860控制器的输入、输出口控制继电器吸合,依据偏差发送相应脉冲驱动电机的方式来调整望远镜位置,这样导致系统复杂,且响应时间长.为实现高精度导行,后换为研华PCI-1761数字式IO(Input/Output)卡,它是一个有8路继电器输出和8路继电器隔离输入的PCI(Peripheral Component Interconnect)卡,引入IO卡后简化了系统,提高了稳定性.
在导行过程中,需要与赤道仪的轴系控制系统相配合.与将质心偏移量换算为运动控制系统的正负脉冲量进行轴系控制的方法不同[11,13],本次导行是通过偏移量改变脉冲频率进行控制,在电机的赤经恒动速度的基础上,采用加减速完成调整.通过设置速度调整系数Sp Adjust,根据偏移量d x,可以将当前速度调整为Speed X=raPerpetualSpeed+d x×SpAdjust,其中raPerpetualSpeed为赤经恒动速度.当d x小于设定的阈值后,停止速度调整.通过速度调整系数SpAdjust的设定,可以实现在偏移阈值范围内,不同的偏移量以不同的速度进行调整.使用这种方法,赤经方向的速度始终大于0(设自东向西为正方向),望远镜能保持自东向西的运动,从而减小传动机构中齿隙的影响.如果使用正负脉冲量进行调整,望远镜在往复运动之间会直接受到齿隙影响,加大系统震荡影响控制精度.赤纬轴1 yr的变化范围为−23◦27′—+23◦27′,在1 d中调整的幅度较小,此外赤纬轴没有设置恒动,不能通过改变速度进行调整,只能通过正负脉冲量来减少偏移.
图3是FMG试观测导行系统的界面,界面左侧可以调整增益、底值、曝光时间等相机参数,同时可以设置存盘间隔和路径.界面右侧下方是导行系统的控制界面,点击Location按钮可以保存基准图像,点击Adjust启动导行功能,自动调焦可以根据图像进行自动调焦,十字键可以对轴系系统进行微动调整.用户通过界面右侧上方可以调整导行参数:只有质心偏移量大于矫正阈值才进行导行操作,可避免微小偏移触发操作,设定值需要经过调试,设定过大影响导行精度,设定过小容易引起轴系振动.为了避免质心大幅偏移时望远镜误操作,只有相邻两次偏移的差值小于间隔阈值才进行导行操作,一般将其设定为比矫正阈值略大的数值.导行时间是指多久进行一次导行检测和调整,设定为合理的导行时间,可避免系统高频振荡.理想情况下,全日面太阳像接近于正圆,用圆心率阈值判断图像是否为正圆,一般将其设定为1.1–1.3.当长短轴之比小于设定值时,图像接近于正圆(比率为1)才能进行导行操作,这样可以避免太阳像偏离出视场或视场受到遮挡时望远镜误操作.亮度阈值设定为观测条件较好时图像像素灰度平均值的30%,低于设定的亮度阈值时,表示图像质量不佳会停止导行.根据试观测的实际情况设定合理的参数,可以避免误操作提升安全性,保证导行系统的可靠性.通过界面参数的调整,使得导行系统在较短时间内与赤道仪的轴系系统协同工作.证明了导行系统具备较好的可移植性,对硬件兼容性高.
4 测试与分析
在外场观测期间,我们在恒动和导行两种条件下,记录了相机采集的全日面太阳像,进行对比并计算跟踪精度.此外,也对比了两种条件下FMG方案阶段试观测的太阳纵向磁图,分析跟踪精度对于磁图空间分辨率的影响.
4.1 不同跟踪条件下的跟踪精度
在实验中进行30 min不间断的跟踪,以1 s/张的频率进行图像采样,逐一计算采样
图像的质心坐标、赤经(赤纬)的跟踪误差RMS即TE为:

其中,ai为采样图像的质心赤经(赤纬)坐标,µ为所有采样图像的平均质心赤经(赤纬)坐标,N为采样图像的数量.在采样图像中,全日面像的直径约为1595像元,当天的太阳视直径为31′33.78′′,所以全日面像中1像元≈1.187322′′.

图3 FMG试观测导行系统界面Fig.3 Guiding system interface for exp erimental observations of FMG
若设xi为采样图像的质心赤经坐标,yi为采样图像的质心赤纬坐标,µx和µy分别为采样图像平均质心的赤经、赤纬坐标,则总体的跟踪误差RMS即TTE为:

图4为开启恒动30 min内的太阳质心在赤经、赤纬方向以及总体的偏移情况.赤经方向的跟踪误差约为8.5747′′,呈现一定的线性变化.赤纬方向的偏差主要集中在两个像元以内,跟踪误差约为1.7538′′,总误差达到8.7522′′.在试观测之前我们对恒动跟踪精度进行了多次评估,恒动跟踪总误差约为10′′,赤经、赤纬跟踪精度波动较大,不满足FMG地面试观测的要求.
图5为开启导行后的太阳质心在赤经、赤纬方向以及总体的偏移情况.赤经、赤纬方向的跟踪精度优于1′′,没有极端峰值的出现.总误差约为0.79201′′,表明导行系统跟踪精度达到1′′/30 min(RMS)的设计指标,可以满足FMG地面试观测的需求.
通过恒动和导行跟踪的对比,单靠赤道仪的恒动跟踪无法满足试观测需求,加上导行跟踪后达到了指标要求.为了验证系统长时间工作的稳定性,图6为开启导行210 min内的太阳质心在赤经、赤纬方向以及总体的偏移情况.赤经、赤纬方向的长时间跟踪精度优于1′′,总误差略大于1′′,证明了导行系统可以为FMG试观测提供稳定的技术支撑.

图4 启动恒动30 min内,太阳质心在赤经、赤纬方向以及总体的偏移量.上图为赤经方向的偏移量,中图为赤纬方向的偏移量,下图为总体的偏移量.蓝线表示实际偏移量的折线,红线表示数据平滑后的连线.Fig.4 During the perp etual motion in 30 minutes,deviations of the solar centroid in right ascension,declination directions,and the total deviations.The top panel shows the deviations in the right ascension direction.The middle panel shows the deviations in the declination direction.The bottom panel is the total deviations.The blue line indicates actual of fset.The red line indicates smoothed of fset.

图5 启动导行30 min内,太阳质心在赤经、赤纬方向以及总体的偏移量.上图为赤经方向的偏移量,中图为赤纬方向的偏移量,下图为总体的偏移量.蓝线表示实际偏移量的折线,红线表示数据平滑后的连线.Fig.5 During the guiding in 30 minutes,deviations of the solar centroid in right ascension,declination directions,and the total deviations.The top panel shows the deviations in the right ascension direction.The middle panel shows the deviations in the declination direction.The bottom panel is the total deviations.The blue line indicates actual of fset.The red line indicates smoothed of fset.

图6 启动导行210 min内,太阳质心在赤经、赤纬方向以及总体的偏移量.上图为赤经方向的偏移量,中图为赤纬方向的偏移量,下图为总体的偏移量.蓝线表示实际偏移量的折线,红线表示数据平滑后的连线.Fig.6 During the guiding in 210 minutes,deviations of the solar centroid in right ascension,declination directions,and the total deviations.The top panel shows the deviations in the right ascension direction.The middle panel shows the deviations in the declination direction.The bottom panel is the total deviations.The blue line indicates actual of fset.The red line indicates smoothed of fset.
4.2 不同跟踪条件下对磁图的影响
FMG在常规模式下30 s生成单幅磁图,我们以纵向磁图为例(见图7,为更直观显示结果,从全日面磁图中提取日面中心附近局部磁图),图中的横纵坐标为视场角.纵向磁图中可以看到黑白磁特征结构,通过对这些特征点的识别,可以判断在不同跟踪条件下跟踪点的位移情况.图7为开启恒动跟踪30 min前后的磁图对比,跟踪点在赤经方向偏移32′′.
图8为开启导行跟踪30 min前后的磁图对比,跟踪点在赤经方向偏移14.5′′.尽管全日面像的质心位置相对不变,但局部日面位置会因太阳自转而发生变化.经过换算,30 min太阳赤道处因自转引起偏移最大量为16.6′′,跟踪点在赤经方向的偏移量略小于换算结果,表明跟踪状态良好.在导行跟踪下,磁图的细节更丰富,在赤经方向的偏移比恒动条件下减少17.5′′.更少的偏移能减少在积分时间内因为图像偏移导致的磁图空间分辨率的降低.

图7 开启恒动30 min前后磁图的对比.左图为刚开启恒动时的磁图.右图为开启恒动跟踪30 min后的磁图.红色圆圈区域为特征点.Fig.7 The comparison of the magnetograms before and after 30 minutes of enabling the perp etual motion.The picture on the left is the magnetogram when the p erp etual motion is just turned on.The picture on the right is the magnetogram after 30 minutes of p erp etual motion.The red circle area is the feature p oint.

图8 开启导行30 min前后磁图的对比.左图为刚开启导行时的磁图.右图为开启导行跟踪30 min后的磁图.红色圆圈区域为特征点.Fig.8 The comparison of the magnetograms before and after 30 minutes of enabling the guiding.The picture on the left is the magnetogram when the guiding is just turned on.The picture on the right is the magnetogram after 30 minutes of guiding.The red circle area is the feature p oint.
5 结论
通过导行跟踪系统,在赤道仪上实现了跟踪精度优于1′′/30 min(RMS)的设计目标,可满足FMG试观测期间高精度磁场观测的要求.该系统对硬件兼容性高,可移植性强.通过对比分析方案阶段试观测期间的纵向磁图,该系统实现了连续稳定的跟踪效果,提升了太阳磁场观测的空间分辨率,为FMG的地面试观测提供了稳定的高精度跟踪方法,并已投入实际使用.
致谢感谢怀柔太阳观测基地的孙英姿、王丙祥、阮文东、王立东等工作人员为搭建试观测平台付出的努力,感谢荀辉、杨潇、王强对本研究提供的帮助和支持.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:24:26
地理空间信息(2022年3期)2022-04-01 14:16:14
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
制造技术与机床(2017年7期)2018-01-19 02:29:53
测绘工程(2017年3期)2017-12-22 03:24:50
学苑创造·A版(2017年4期)2017-05-13 22:56:06
小天使·一年级语数英综合(2015年8期)2015-07-06 06:28:12
小朋友·快乐手工(2015年1期)2015-03-13 00:10:59
科学启蒙(2014年9期)2014-11-12 19:51:57
航天器工程(2014年5期)2014-03-11 16:35:53