模拟雾环境下目标图像清晰度研究
2020-07-27 07:53:04崔刚刚徐安恬周小丽
照明工程学报 2020年3期
崔刚刚,徐安恬,周小丽
(1.复旦大学光源与照明工程系,上海 200433; 2.复旦大学先进照明技术教育部工程研究中心,上海 200433)
引言
随着科技的发展,汽车的自动避险系统可以识别与区分出目标,使用摄像系统,对前方场景进行拍摄,在人眼识别之前,使驾驶者尽早的了解到前方路况,以提前做出反应。雾天等特殊的自然天气会给交通安全带来隐患。如何在雾环境下识别有用的信息,这些是需要解决的问题。对于待观测目标,浓雾的存在会阻挡视线,原本的光线被浓雾散射反射折射,导致进入观测器和人眼中的光线发生变化,影响机器识别和人眼识别,产生错误的判断。现有的自动避险和监控拍摄,大多是通过图像拍摄,对采集到的图像进行分析、处理后提供给驾驶员相应的信息。因此,研究图像采集清晰度与雾浓度之间的关系具有实际的意义。
本文在实验室建立模拟雾环境,在不同雾浓度下采集目标图像,采用目前交通标识和车牌号中常采用的两种颜色,将图像直接灰度化,将彩色图像变成灰色图像,用灰度值来表征各个像素的图像特点,采用图像中目标和背景之间的对比度来研究不同雾浓度下图像清晰度,得到雾浓度下图像清晰度之间的数量关系,可为后续图像识别与自动控制研究提供数据依据。
1 实验
1.1 实验装置
在光学领域,关于雾的研究较多,主要集中在光的散射和吸收特性的分析。文献[1]中用心理物理方法定量地测量了稠密雾中色光的色觉和视觉特征。实验中,用传感器代替人眼,进行实验采集。本文借鉴了这种方法,用相机代替人眼,进行图像采集,再对图像进行分析,找到之间的量化关系。
雾是水蒸气所形成的气溶胶,它的颗粒直径在3~10 μm之间[2]。自然雾环境难以捕捉,难以做重复性实验与控制变量,因此,本文选择在实验室搭建实验箱,构建模拟雾环境。实验箱为长宽高3 m×0.65 m×1.2 m的黑色暗箱。实验装置如图1~图3所示。暗箱的框架由木结构构成,在实验箱内表面粘贴有黑色泡沫塑料板,以避免反光。本文以文献[3-5]中所描述的实验环境为参考,进行实验室搭建。以LED作为实验光源安装在密闭的小木箱里,贴近黑色暗箱并固定,使从另一端的观测窗口能观测到光源,再将待识别的目标灯片,贴合于LED光源右侧的扩散板上,使LED光源为灯片提供均匀的背光照明,从而保证在观察窗口可以清楚地观测到待测目标。与光源相对的另一侧为黑色活动挡板,其上有一个观测窗口,其长宽为38.3 cm×23.2 cm,窗口下边缘距隔板底部62.7 cm,上边缘距隔板顶部25.3 cm。观察窗口上配置一块45 cm×30 cm的防雾玻璃,可以将窗口完全覆盖。暗箱向后延伸大约1 m的侧壁和顶棚,遮挡外部的光照,避免数码相机在视觉窗口附近对箱内图像的拍摄受侧方向的眩光影响。

图1 实验箱俯视图Fig.1 Top view of the experimental box

图2 实验箱侧视图Fig.2 Side view of laboratory box

图3 实验室实际图Fig.3 Laboratory practical chart
在实验箱的长边两侧有4个圆形充雾孔,均匀分布在实验箱的顶端两侧,每侧各两个。圆孔的直径为3 cm,此处设定灯箱所处的一端为箱子前端。左前洞与箱子前端距离为49.5 cm,距地面114 cm;左后洞与箱子前端距离为147.5 cm, 距地面高度为113.5 m;右前洞与箱子前端距离为45 cm,距地面114 cm;右后洞与箱子前端距离为147 cm, 距地面高度为114 m。洗衣机进水管均与箱壁近似垂直,出口略微朝上偏,因此雾气入箱后有一个上抛的过程,避免暗箱顶端中线的雾气浓度过低。加湿器与进水管的连接处用密封胶密封,加湿器与箱壁的连接处用硅胶密封,减少雾气的泄漏,以免影响加湿效果。抽气孔位置为实验箱一侧的中上部位置,与观测窗口的中心高度相当。
本文选用4台相同型号和功率的加湿器进行人工造雾。数码相机安装在三脚架上,三脚架紧贴活动挡板外侧,使数码相机与灯片的垂直距离近似为3 m。数码相机的安装高度可根据拍摄目标的位置进行调整,从合适的角度清晰完整地拍摄观测目标。
选用TSI粉尘仪测量雾浓度,其单位为mg/m3。利用1个1 m长的气体导管,从待测气体样品中抽取样气到粉尘仪的光学检测室中,在光学室中,气溶胶经过激光束,产生脉冲,该脉冲的强度用来计算颗粒物的数量和粒径,其测量粒径范围在0.3~10 μm。因此用该设备测量雾浓度,与超声波产生雾的粒径范围相匹配,可以实现准确测量。除以上设备外,还需要一部WiFi功能的手机,用于无线连接数码相机,实现非接触控制相机拍摄图片,防止拍摄图片时按压快门造成的人为操作误差。
1.2 雾浓度测量和图像采集
1)实验准备阶段。测量环境温度和湿度,预热光源40 min,保证粉尘仪和数码相机的充足电量。连接和组装粉尘仪的检测部件,启动粉尘仪,设置采样时间和采样周期,调试并进行零点校准,使粉尘仪处于正常稳定的工作状态。调试数码相机的拍摄模式,并选择手机嵌入式模式,使相机与手机通过无线连接到一起。用手机APP控制数码相机,观察焦距与相机角度,调试并校准,使相机图像的中心落在待测灯片上,固定相机位置。将实验室内的灯光关闭,使实验环境处于黑暗环境下。
2)实验操作阶段。启动四台加湿器,同时设置10 min倒计时。经过多次实验分析,充雾10 min可以满足实验要求的雾浓度和变化曲线。以时间来间接控制雾浓度的最大值,从而实现控制变量。待到倒计时结束后,关闭4台加湿器,同时按下粉尘仪的启动按钮开始测量雾浓度,粉尘仪会根据设置好采样时间和周期进行数据采集,待到时间结束便会自动停止测量。测雾同时,每间隔10 s用手机按下拍摄按钮1次,采集1次图像。待到采样时间结束的同时,停止拍照;导出实验数据,分析结果。
2 实验数据处理与分析
2.1 图像清晰度与灰度直方图的关系
在交通标识和车牌号中,所观测目标常为两种颜色的简易文字。即背景为一色,目标为一色。采集到的图像为彩色图像,不需要研究颜色的影响,将采集到彩色图像做灰度化处理,将图像转化为灰度图像。所有像素的特点,都可用256个灰度级来一一标识。因此一幅图像就可以用数字来表示它的每一个像素,而这些数字所组成的数表就反映出了整幅图像的特点。对于灰度图像,灰度直方图能够反映出目标与背景的差异。因为目标和背景只是二色图像,所以图像的灰度直方图会出现双峰状况,双峰之间的距离反映了目标与背景之间的灰度级的差值。双峰越接近,目标与背景之间的灰度级差值越小,即目标与背景的灰度值越接近。灰度值,表示的是图像的明暗程度,不同的数值代表着不同的灰度[6]。当只有单峰存在时,就无法区别目标与背景,双峰距离越大,图像就会越清晰。因此,可以用采集到的彩色图像灰度化后,用灰度直方图的双峰距离来表征目标与背景之间的对比区分度。
对于待观测物,浓雾的存在会阻挡视线,原本的光线被浓雾影响,导致进入观测器和人眼中的光线发生变化,影响机器识别和人眼识别,产生错误的判断。从效果看,采集到的图像,从原来的清晰图像,变成整体灰暗,使得目标和背景无法区分。因此,空间中存在的雾影响的就是目标与背景之间的对比程度。目标与背景之间对比越明显,区分度越高,目标信息越清晰。浓雾阻碍了光线的透过,使进入观测器的光线变少,图像变得灰暗。
2.2 图像清晰度与图像灰度标准偏差的关系
灰度直方图直观反映了图像灰度的统计特性,因此也可用平均值和标准偏差描述图像灰度的统计特性。本文通过图像处理方法对图片分析,得出图像灰度直方图分布的双峰位置之间的距离,反映了灰度图像的清晰度。由于噪声的存在,双峰距离无法直接测量,但可以用图像灰度的标准偏差表征。因此可用图像的标准偏差值量化图像的清晰度,再与同时段所测得的雾浓度进行匹配分析,得出雾浓度变化速率与图像清晰度变化速率之间的定量关系。
标准偏差是总体各单位标准值与其平均数离差平方的算术平均数的平方根,它反映组内个体间的离散程度。
平均值公式:

(1)
标准差公式:

(2)
式(1)和式(2)中数值xi表示图像中每一个像素的灰度值,μ为算术平均值,σ为图像的标准差,标准差反映了灰度图像的灰度值分布情况,因此可作为图像清晰度的表征。
本文选用MATLAB软件对截取的图像进行处理,算法步骤如下:①载入彩色图像;②转换为灰度图像;③求图像均值;④求标准偏差。
每组图像中的每幅图像都作如上处理,然后将一组图像的标准偏差汇总到Excel表中,作为后续origin软件直线拟合数据。
2.3 雾浓度变化曲线分析
图4为无雾时,相机拍摄到的目标。通过图片可以清楚地分辨出视力表的从上往下的E字方向。在实验数据分析时,选择第二行的E字位置作为目标截取。图5为充雾后,相机拍摄到的目标。通过图片已经无法清楚地分辨视力表的信息。

图4 无雾环境Fig.4 Fog-free environment

图5 有雾环境Fig.5 Foggy environment
经过多组实验,发现每次实验的雾浓度变化都出现了图6所示情况,这就反应了雾浓度的变化情况,忽略刚开始的雾浓度的波动,从最高值下降到一定的值后,会有一定的返回的现象存在。当做完一次实验后,不对实验箱进行风干处理,紧接着做下一次实验,发现雾浓度下降的很快,说明环境湿度会对雾浓度的下降速率产生影响,同时,在观测环境温度发现不同温度对雾浓度变化也会产生影响。故在实验中,每次试验完成需要对实验箱进行风干后再进行下一次实验,同时应保证环境温度恒定。

图6 雾浓度随时间变化曲线Fig.6 Curve of fog concentration with time
从图6可知,雾浓度在7 min的测量时间内,会先经过一个线性的变化,然后趋于平稳。分析可知,实验箱的雾环境下,中上部位置的雾浓度低于中下部位置,因此,测量中上部位置时,由于高浓度下的雾浓度变化较快,中上部位置雾浓度严重低于中下部,雾会从浓度高的位置向浓度低的位置流动,从而出现测量数据中的第2个峰值的出现。在分析数据时,选用雾浓度变化较为线性的时间段内的数据进行分析。雾浓度数据与图像数据共用1个时间轴,可以找到相对应时间的图像数据,进行匹配分析,找出某段时间内雾浓度变化与图像数据变化的关系。对雾浓度变化较线性的时间段进行截取,并找出该段时间内的数据进行直线拟合,得到它的最佳的线性关系。
2.4 图像清晰度变化分析
选取图6中的雾浓度变化较为线性的时间段内对应的图像,根据分析,选取了其中16幅图像,如图7所示。从DSC01798到DSC01814可以明显看到,字符越来越清晰,随着雾浓度的降低,图像清晰度上升。
图8为图7中每幅图像所对应的灰度直方图,从DSC01798.JPG到DSC01814.JPG,可以看到,灰度直方图由单峰逐渐变成双峰,并且双峰分散程度越来越高,图像越来越清晰。
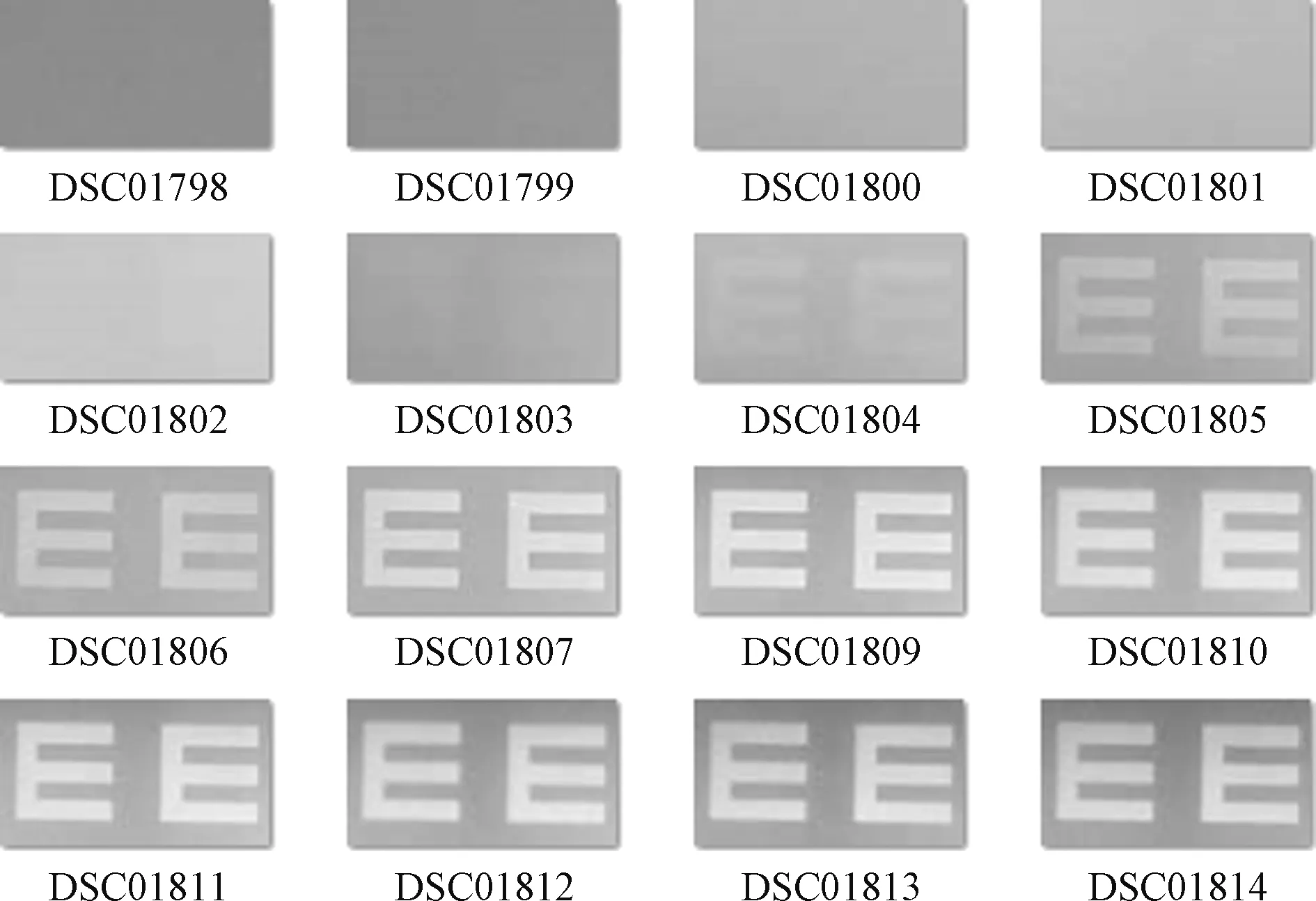
图7 裁剪后的一组图像Fig.7 A set of clipped images

图8 灰度直方图Fig.8 Gray histogram
2.5 雾浓度与图像标准偏差拟合分析
2.5.1 实验拟合数据
每次实验都在环境温度和湿度相近的条件下进行,每组实验采集到了42幅图像和420个雾浓度数据,首先对雾浓度数据处理,分析其变化曲线,确定要截取的时间段;再对每幅图像裁剪、灰度化、求标准偏差,根据选取的时间段选择对应图像数据,然后对每组实验数据进行拟合分析。
1)第一组实验。从雾浓度的变化过程分析,选择了0~140 s时间段内的雾浓度测量值和图像标准偏差值,用origin pro软件画出雾浓度变化的拟合直线和图像标准偏差值的拟合直线,如图9所示,拟合数据如表1所示。
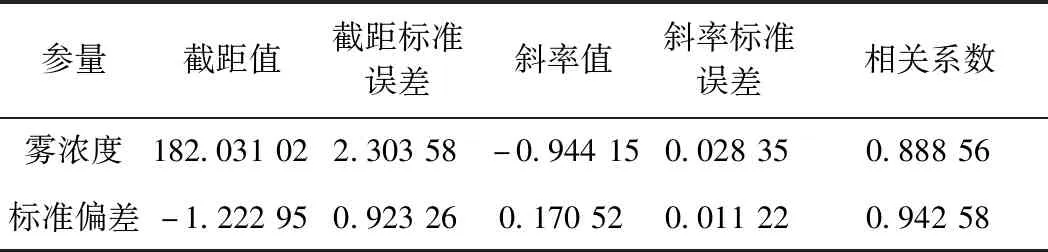
表1 第一组拟合数据

图9 第一组实验结果Fig.9 The first set of experimental results
2)第二组实验。从雾浓度的变化过程分析,选择了50~100 s时间段内的雾浓度测量值和图像标准偏差值,用origin pro软件画出雾浓度变化的拟合直线和图像标准偏差值的拟合直线,如图10所示,拟合数据如表2所示。

图10 第二组实验结果Fig.10 The second set of experimental results

表2 第二组拟合数据
3)第三组实验。从雾浓度的变化过程分析,选择了30~190 s时间段内的雾浓度测量值和图像标准偏差值,用origin pro软件画出雾浓度变化的拟合直线和图像标准偏差值的拟合直线,如图11所示,拟合数据如表3所示。

图11 第三组实验结果Fig.11 The third set of experimental results

表3 第三组拟合数据
4)第四组实验。从雾浓度的变化过程分析,选择了0~120 s时间段内的雾浓度测量值和图像标准偏差值,用origin pro软件画出雾浓度变化的拟合直线和图像标准偏差值的拟合直线,如图12所示,拟合数据如表4所示。
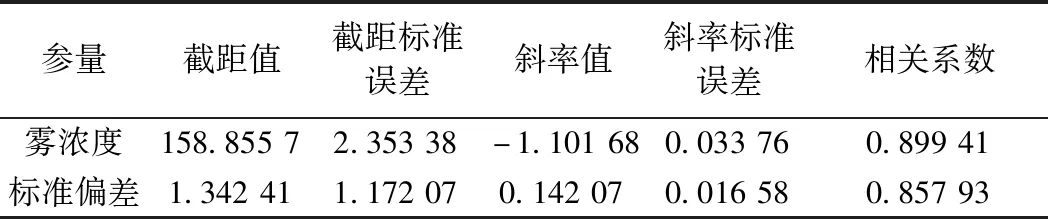
表4 第四组拟合数据

图12 第四组实验结果Fig.12 The fourth set of experimental results
5)第五组实验。从雾浓度的变化过程分析,选择了10~110 s时间段内的雾浓度测量值和图像标准偏差值,用origin pro软件画出雾浓度变化的拟合直线和图像标准偏差值的拟合直线,如图13所示,拟合数据如表5所示。

图13 第五组实验结果Fig.13 The fifth set of experimental results

表5 第五组拟合数据
6)第六组实验。从雾浓度的变化过程分析,选择了40~130 s时间段内的雾浓度测量值和图像标准偏差值,用origin pro软件画出雾浓度变化的拟合直线和图像标准偏差值的拟合直线,如图14所示,拟合数据如表6所示。

图14 第六组实验结果Fig.14 The sixth set of experimental results

表6 第六组拟合数据
7)第七组实验。从雾浓度的变化过程分析,选择了30~120 s时间段内的雾浓度测量值和图像标准偏差值,用origin pro软件画出雾浓度变化的拟合直线和图像标准偏差值的拟合直线,如图15所示,拟合数据如表7所示。

表7 第七组拟合数据
从图9~图15可以看出,随着雾浓度的线性下降,图像标准偏差值线性上升,说明随着雾浓度的降低,图像越来越清晰。
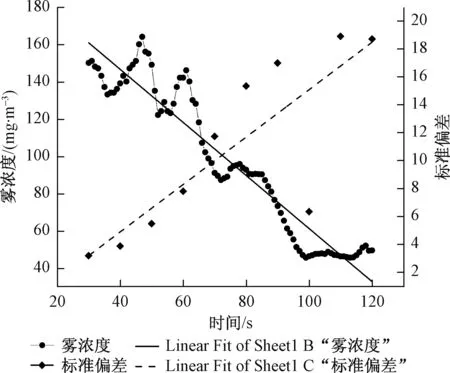
图15 第七组实验结果Fig.15 The seventh set of experimental results
2.5.2 拟合直线斜率
将7组数据进行汇总,如表8所示,雾浓度的拟合直线斜率均值为-1.4,说明雾浓度在以每秒1.4 mg/m3的速率减小;标准偏差的拟合直线斜率均值为0.15,说明图像灰度值的标准偏差在以每秒0.15个灰度的速率增大。通过分析每组拟合数据的相关系数,可知拟合直线的拟合程度较好,因此拟合直线可以近似描述雾浓度和标准偏差的变化。由以上分析可知,随着雾浓度的下降,图像的清晰度逐渐上升,并且它们之间存在一定的线性关系。

表8 拟合直线斜率数据表
3 结论
综上,在停止充雾后,雾浓度会随着时间越来越小,图像越来越清晰,并且在一段时间内,雾浓度和图像清晰度都会呈现线性变化。经过多组实验,均得到类似数据,分析数据得出如下结论:
1)在某段时间内,雾浓度变化与图像的清晰度存在较稳定的数量关系。
2)在雾浓度较高时,随着时间的变化,雾浓度以每秒约1.4 mg/m3的速率减少,浓度减少到一定数值,雾浓度变化速率将减慢。
3)在雾浓度变化较线性的时间段内,对应图像的标准偏差变化速率也较为线性,约为0.15,它说明图像灰度值的双峰之间的差值以每秒0.15个灰度级的速率增大,表示图像越来越清晰。
4)环境温度和湿度会影响雾浓度变化速率。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
科学技术创新(2021年19期)2021-07-16 10:07:18
高技术通讯(2021年3期)2021-06-09 06:57:48
家庭影院技术(2020年11期)2020-12-28 01:22:30
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
科技与创新(2016年10期)2016-05-28 03:17:18
测绘通报(2014年3期)2014-08-16 03:15:52
声学技术(2014年2期)2014-06-21 06:59:08
华东理工大学学报(自然科学版)(2014年4期)2014-02-27 13:49:14