
基于慧鱼组合模型的小型手扶式菠萝自动采摘机设计
2020-07-25 06:56马登秋冯前军叶振环蒋兵徐建英申中秋陈派余玉民
科技与创新 2020年14期
马登秋,冯前军,叶振环,蒋兵,徐建英,申中秋,陈派,余玉民
基于慧鱼组合模型的小型手扶式菠萝自动采摘机设计
马登秋,冯前军,叶振环,蒋兵,徐建英,申中秋,陈派,余玉民
(遵义师范学院 工学院,贵州 遵义 563006)
为解决菠萝采摘效率低、采摘成本较高、劳动强度大、芒刺对果农伤害较大等问题,根据菠萝的结构特征、生长和种植特点以及采摘装置功能需求,设计了一款小型手扶式菠萝自动采摘机。该采摘机主要由采摘装置、传输装置、导向装置、成熟识别装置、大小筛选装置、手扶装置及驱动控制装置等组成,基于SolidWorks和慧鱼组合模型完成了采摘机的三维建模和实物组装。
慧鱼组合模型;采摘机;菠萝;小型手扶式
1 引言
菠萝有极高的经济价值,但菠萝采摘难,采摘成本高,劳动强度大[1-3],为解决以上难题,设计了一种小型实用机械采摘装置——小型手扶式菠萝自动采摘机。小型手扶式菠萝自动采摘机能自动地批量采摘,识别成熟与否及分类收集,而且制造成本低、维护简单、操作简单、转向灵活。此装置的成功设计,可有效解决菠萝采摘难的问题,促进菠萝产业的发展。
2 小型手扶式菠萝自动采摘机结构设计
2.1 设计要求
根据菠萝植株生长特点和高效省力地采摘菠萝以及经济性要求,设计的菠萝采摘机应该具备以下功能:自动多排采摘、自动运输、成熟识别、大小分类收集、操作简单、助力、单人操作、小型化、制造成本低、维护成本低等。
2.2 U形导向滚筒槽采摘机构设计
U形导向滚筒槽采摘机构由螺栓轴、滚筒、连接板、连接杆、槽轮、皮带、支撑杆及圆盘齿刀等组成,如图1所示。

1—连接板;2—螺栓轴1;3—连接杆;4—滚筒1;5—支撑杆;6—皮带;7—工形滚筒;8—滚筒2;9—螺栓轴2;10—槽轮;11—圆盘齿刀。
工作原理:将摆向凌乱的菠萝在采摘前规则排列进行切割收集,将采摘后的菠萝顺利导引至U形挡板传输带上。该过程中,菠萝从菠萝树上粗切断是一个关键性的动作,实现菠萝果实和植株的分离,此后菠萝将移动到第二个圆盘刀处行精切,然后菠萝滚至U形挡板传输带上。
2.3 U形挡板传输带设计
U形挡板传输带由U形挡板、带块、带齿条、齿轮、支撑杆、齿轮轴、支撑架及挡板等组成,如图2所示。

1—支撑杆1;2—支撑杆2;3—链条;4—U形挡板;5—连接头;6—齿轮;7—锁孔销;8—挡板;9—传输带块;10—支撑轴。
工作原理:将U形导向滚轮槽采摘机构中切割后的菠萝逐一向上传输至V形导向滚轮槽。此过程中,因U形挡板采用弧形式设计,加上两侧及对面挡板之间的相互关系,使得U形挡板传输带能顺利地将菠萝传输至V形导向滚轮槽。
2.4 U形挡板传输带设计
导向V形滚筒槽机构由螺栓轴、滚筒、螺母、V形支撑架等组成,如图3所示。

1—螺栓轴1;2—螺栓轴2;3—螺栓轴3;4—螺栓轴4;5—螺栓轴5;6—滚筒1;7—滚筒2;8—滚筒3;9—滚筒4;10—滚筒5;11—V形支撑架;12—螺母。
工作原理:将U形挡板传输带上传来的菠萝由横向变为竖向,便于传输到带传输机构上,由成熟度识别机构进行识别。因使用了V形倾斜式设计,因此具有自动对中功能、利用自身自重及U形挡板传输带机构给的一定的初速度,在V形滚筒上将具有一定的惯性,顺利有序地将菠萝传至带传输机构上。
2.5 成熟度识别机构设计
成熟度识别机构由识别执行电机、颜色识别传感器、识别执行杆、传动齿轮、平带传动电机、支撑杆及传输平带等组成,如图4所示。

1—识别执行电机;2—识别执行杆;3—颜色识别传感器;4—传动齿轮1;5—传动齿轮2;6—平带传动电机;7—支撑杆;8—传输平带。
工作原理:主要对导向V形滚筒槽机构上传来的菠萝进行识别作业。一是通过颜色识别传感器进行成熟度识别,将不成熟的菠萝分选出来装入不成熟收集框内,二是将识别完的成熟菠萝传至筛选机构中。
2.6 筛选机构设计
筛选机构由滚筒、螺栓轴、螺母、连接架及收集框等组成,如图5所示。

1—转动连接头;2—螺栓轴;3—连接架;4—大菠萝收集框;5—滚筒;6—螺母;7—小菠萝收集框。
工作原理:将带传输机构上传来的菠萝进行大小区分,将其分入各自的收集框内。因筛选机构采用倾斜式设计,加上筛选机构中采用了等间距的滚筒,菠萝经过滚杆上时因自身自重及带传输机构给的一定初速度,在滚杆上将会有一定的惯性,自此大小不同的菠萝将会落入间距不同的滚杆间进行大小筛选至所对应的收集框中。
2.7 驱动机构设计
驱动机构由连接杆、支撑轮、传动轴、连接销、转向圆盘、驱动电机等组成,如图6所示。
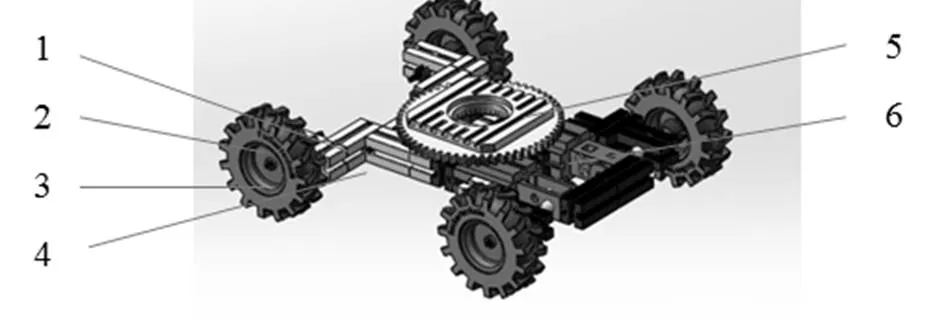
1—连接杆;2—支撑轮;3—传动轴;4—连接销;5—转向圆盘;6—驱动电机。
工作原理:通过支撑轮及连接杆的支撑作用,经驱动电机实现整个装置的移动及转向,转向圆盘可使除驱动机构装置以外的其他装置实现360°旋转。
2.8 三维建模及组装
小型手扶式菠萝自动采摘机装配分功能模块装配,首先分别完成采摘装置、传输装置、导向装置、成熟识别装置、大小筛选装置、手扶装置及驱动控制装置的装配,然后按照模型整体的装配关系完成整体模型的装配,如图7所示。
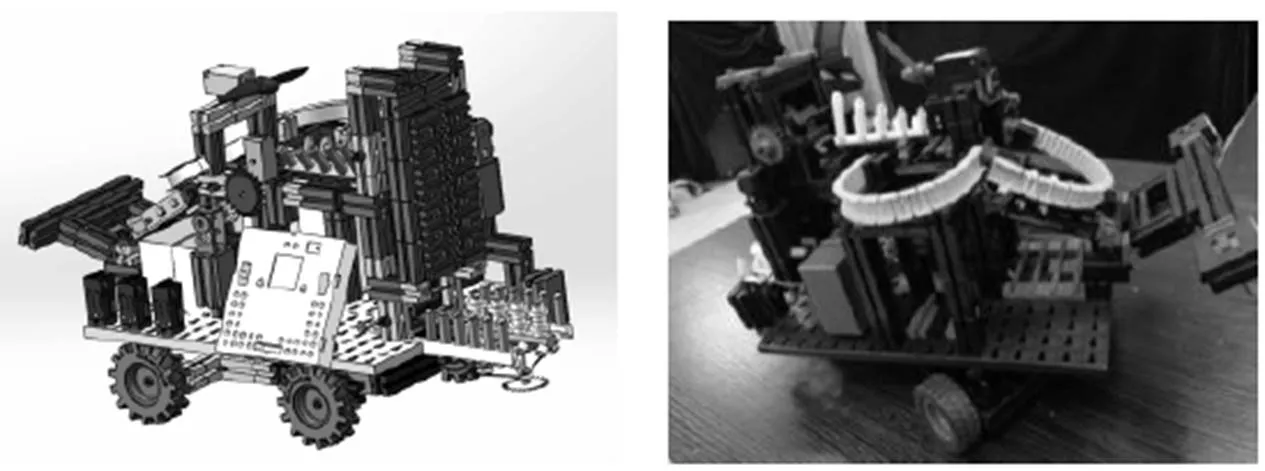
图7 小型手扶式菠萝自动采摘机装配
3 结语
为解决菠萝采摘难、成本高、劳动强度大等难题,设计研发了一种小型实用性机械采摘装置——小型手扶式菠萝自动采摘机。采摘机主要由采摘装置、传输装置、导向装置、成熟识别装置、大小筛选装置、手扶装置及驱动控制装置等组成,小型手扶式菠萝自动采摘机能自动地批量采摘,识别成熟与否及分类收集,而且制造成本低、维护简单、操作简单、转向灵活。此装置的成功设计,可有效地解决菠萝采摘难的问题,促进菠萝产业的发展。
[1]吴沛晟,华京.菠萝采摘机器人的实用化设计[J].兰州工业学院学报,2016,23(3):58-61.
[2]辛宝英,施俊侠,廖湘湘,等.菠萝采摘机械手结构设计[J].农业技术与装备,2014(14):12-14.
[3]张俊昌.菠萝自动采摘机的优化设计与分析[D].广州:仲恺农业工程学院,2014.
S225
A
10.15913/j.cnki.kjycx.2020.14.062
2095-6835(2020)14-0147-02
马登秋(1991—),男,硕士,实验师,主要从事机电一体化系统设计研究。冯前军(1998—),男,本科生,主要从事机械结构设计研究。
〔编辑:王霞〕
猜你喜欢
铀矿冶(2022年2期)2022-04-27
幼儿教育·父母孩子版(2021年6期)2021-08-05
幼儿教育·教育教学版(2019年9期)2019-02-02
发明与创新·中学生(2018年1期)2018-02-02
科学与财富(2017年32期)2017-12-20
中国新闻周刊(2017年23期)2017-07-12
发明与创新·大科技(2017年1期)2017-01-14
科技创新导报(2016年8期)2016-10-21
科技资讯(2016年7期)2016-05-14
印刷技术·数字印艺(2016年8期)2016-05-14
