
多功能智慧路灯的控制系统与设计
2020-07-25 06:56周启沛谢毓鸿
科技与创新 2020年14期
周启沛,谢毓鸿
多功能智慧路灯的控制系统与设计
周启沛,谢毓鸿
(武汉理工大学 能源与动力工程学院,湖北 武汉 430063)
随着社会经济的不断发展,中国城市规模也在快速扩大,人口逐渐向城市集中,由此带来的环境污染、交通堵塞等问题也越来越严重。针对一系列现有的城市问题提出一种新型智慧灯杆的设计方案,在集绿化智能灌溉、空气智能除霾、多功能端口等功能于一身的同时采用新能源风光互补发电供能。同时根据灯杆安装地点的不同,创新性提出了对灯杆集成的功能进行可拆装模块化设计,各个模块在云技术和物联网组成的智能工控系统调节下构成智慧城市治理系统,以达到智能化节水、减排、除霾的节能减排效果。
智慧城市;智能除霾;集成控制;物联网
2014-03中共中央、国务院发布的《国家新型城镇化规划(2014—2020)》《关于促进智慧城市健康发展的指导意见》中明确提出“推进智慧城市建设”的目标。报告中指出智慧城市的建设能有效推动基础设施智能化,提升社会公共服务的水平,实现城市大数据的决策支持,是推动城市现代化建设的主要动力。
当前智慧城市的建设风起云涌。国际上,欧盟制定了智慧城市建设框架[1],美国提出了加强智慧型基础设施建设和推动智慧应用项目的经济刺激计划,韩国、日本先后推出建设智慧城市的国家战略规划,中国超过300个城市相继提出建设智慧城市的目标[2]。但这些城市在信息化时代发展的过程中遇到了严重的信息资源难以互通、资源消化和环境恶化日趋严重、公共设施供给不足等问题。这些问题直接导致了中国智慧城市发展缓慢,网络基础设施建设不充分,达不到“智慧”的要求。
路灯作为城市基础设施建设中的重要一环,既能为居民日常生活提供便利,也是城市现代化发展的一项标志。本项目针对一系列现有的城市问题提出一种新型智慧灯杆的设计方案,在集绿化智能灌溉、空气智能除霾、多功能端口等功能于一身的同时采用新能源风光互补发电供能。同时根据灯杆安装地点的不同,创新性地提出了对灯杆集成的功能进行可拆装模块化设计,各个模块在云技术和物联网组成的智能工控系统调节下构成智慧城市治理系统,以达到智能化节水、减排、除霾的节能减排效果。
1 设计方案
1.1 结构设计方案
本装置针对现有灯杆功能的局限性,以路灯灯杆为载体,基于云技术和物联网的智能工控系统研究,开发设计了一套集绿化智能灌溉、空气智能除霾、风光互补发电等功能于一体的智能灯杆智慧城市系统。
灯杆主要由顶部的垂直轴风力发电机、镶嵌于灯帽上表面的太阳能发电板、干湿方式结合的静电除霾装置、自适应绿化灌溉装置和智能控制系统等部分构成,灯杆整体结构图效果如图1所示。

图1 灯杆结构效果图
1.2 物联网硬件设计
系统设计主要分为单个灯杆的集成化功能设计与各灯杆交互网络设计。交互网络采用ZigBee低功耗无线控制协议,树形拓扑结构网络,以街道最后一根灯杆为网关。系统各节点主要由STM32F429处理器、电磁阀、传感器以及ZigBee模块组成,各节点通过ZigBee无线网和网关通信,网关通过GPRS接入区域网和决策系统通信,组成信息网络,主要实现监测空气质量和土壤水分、传输相应数据、改善空气质量、灌溉绿化带等功能,系统控制结构如图2所示。
1.3 智能绿化灌溉模块
智能绿化灌溉模块在控制平台的分析调控下,对绿植进行科学有效的节水灌溉,系统主要由电磁阀、可调节雾化喷头、增压器组成。绿化灌溉装置如图3所示。
位于灯杆底部的自动绿化灌溉系统通过土壤湿度传感器、无线传感网络和电子控制台实现对土壤的信息采集、传递、计算以及对管道中流水量的自动控制。
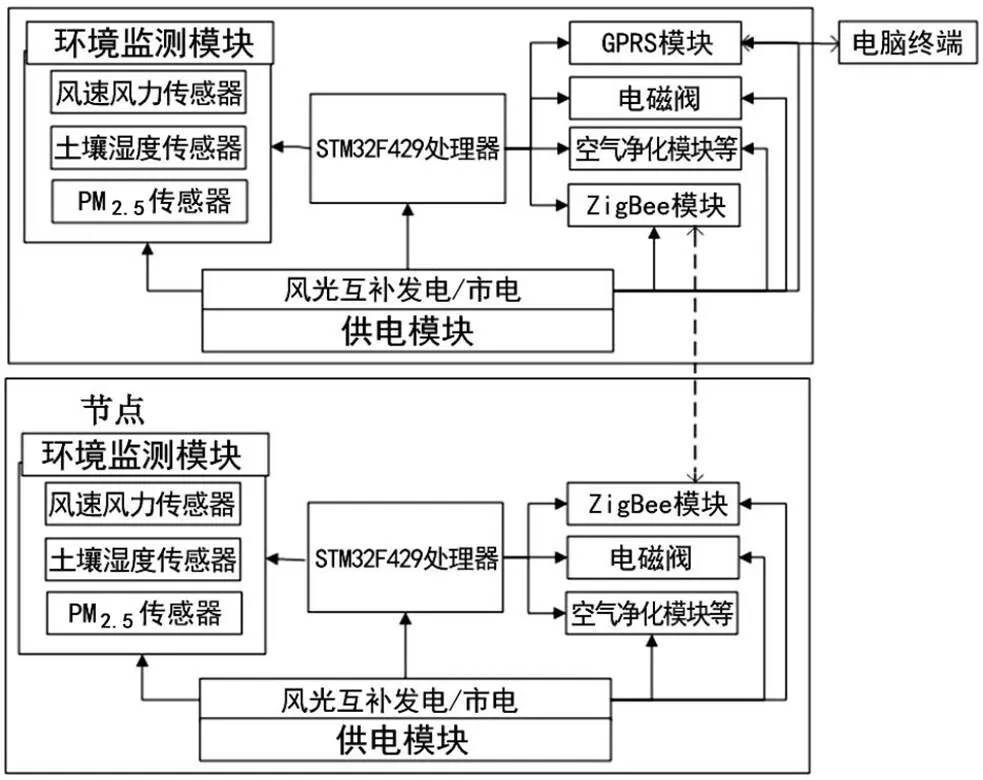
图2 系统控制结构图

图3 绿化灌溉装置图
由土壤湿度传感器采集的信息通过信息无线网络传输到电子控制平台,电子控制平台以模糊推理技术为根据计算出绿植的蒸散量和需水量,并控制管道中流水量的大小、通水喷淋时间和喷水方式。自动灌溉系统还可以结合降水量、温度、风速、空气相对湿度、日照时数等气象因素以及特定植物的生长系数和当地土壤条件进行智能分析调控,从而进行科学有效地进行节水灌溉,保障植物的正常生长。绿化灌溉模块的整体控制如图4所示。
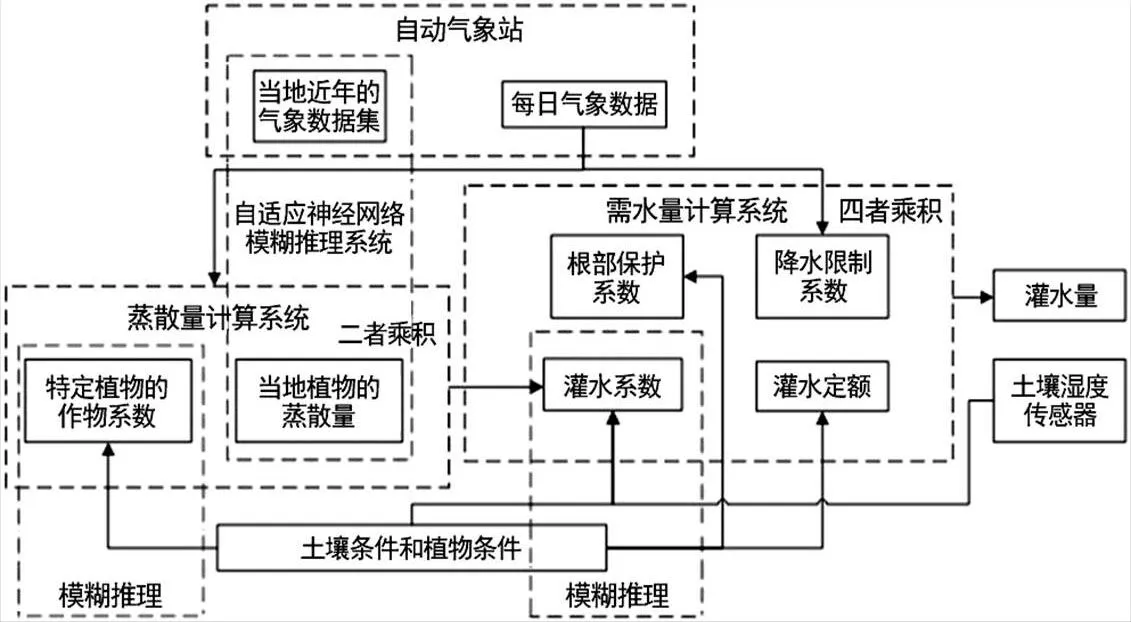
图4 绿化灌溉模块的整体控制框图
1.4 智能除霾模块
空气净化系统采用干式净化与湿式净化相结合的方式对环境中的污染空气进行降尘、除尘,降低空气中不可吸入颗粒物的浓度。空气净化系统根据气象局结合自身传感器识别的方式进行环境信息的采集,数据处理后由系统控制器对空气净化系统的工作状态进行控制和调整。
1.4.1 干式除霾净化模块
干式净化模块主要由初效过滤器、活性炭、HEPA高效净化器、抽风机组成。
气体通过小型大风量抽风机将外界的气体吸入风道,由不锈钢滤网制成的初效过滤器能够过滤掉大气中粒径较大的颗粒物,减少大粒径颗粒物对装置本身的损害。活性炭、HEPA高效净化器内包含了活性炭滤层和HEPA滤层,该装置能够清除经过初效过滤器后气体中绝大部分的不可吸入颗粒物,干式净化模块装置如图5所示。

图5 干式除霾模块装置图
干式净化装置在积尘过多以至于影响装置正常工作时可由人工进行拆卸、清理和安装。当空气质量状况达到轻度或中度污染时(空气质量指数为100~200),空气净化系统启用干式空气净化装置对环境进行净化,直至系统收到空气质量指数小于等于90的停止信息。
1.4.2 湿式除霾净化模块
湿式净化装置主要由环形雾化喷头、电磁阀、水磁化器和增压器组成。
环形雾化喷头由不锈钢制成,有较强的耐腐蚀性,其能够调节喷口的大小改变水的流量。管道内由磁化器磁化后的自来水经增压后,以水雾的形态喷出对周围环境进行喷洒降尘。装置中电磁阀开关由系统自动控制。
当系统收到空气质量状况为重度污染或严重污染的信息时(空气质量指数大于200)[3],空气净化系统同时启用湿式净化装置和干式净化装置对环境中的污染气体进行净化;当空气质量指数小于等于190时,系统会关闭湿式净化装置。另外,当系统收到外界环境正在降雨或风速较大(风速大于5.5 m/s)的信息时[4],湿式净化模块也会自动关闭。图6为湿式除霾净化模块装置图。

图6 湿式除霾净化模块装置图
2 理论计算及仿真分析
2.1 除霾效果实验
2.1.1 系统阻力计算
用截面20 cm×20 cm风道模型进行实际测试,风道内有初效过滤器、中效过滤器、活性炭和HEPA高效过滤器,实验得到系统总阻力1为198.69 Pa。
选用风机为SAFD-100静音斜流风机,风机参数如表1所示。
表1 风机参数
型号电压/V功率/W转速/(r·min-1)风量/(m3·h-1)静压/Pa噪声/dB SAFD-100220502 80078025026
2.1.2 净化区域面积
每套系统中有1台风机,净化速率=780/3 600= 0.22 m3/s。由于对人体有害的污染气体主要分布在0.5~2 m的高度范围内,因此假设净化空间是一个高1.5 m的圆柱空间,1.5×∏×2=0.22。可得每秒净化半径=0.22 m,每秒净化直径=2=0.44 m。
本系统实际净化过程中,不断地净化污染气体,排出干净的空气。新鲜空气又不断与周围空气掺混,进行物质交换,是一个动态的复杂过程,此处进行如下离散简化:①二维平面上每个方向上净化情况完全一样;②假设风速为0.44 m/s,0.44 m为一个单位长度,直径0.44 m、高1.5 m的圆柱空间为一个单位空间;③每一秒时间内都相继发生三个过程,即净化、移动、掺混。
系统的除霾目标是将以它为中心的直径0.44 m、高 1.5 m的圆柱单位空间内的污染物浓度降为0。移动指每个单位空间的气体移动到下一个单位空间所在位置上。掺混指每个单位空间的气体都与上一个每个单位空间的气体发生物质交换,污染物浓度都变成两者平均浓度。
假设污染物初始浓度为200(四级中度污染),用 EXCEL进行迭代计算,1 min后,污染物浓度低于100(二级良)的区域为42个单位,折合净化直径18.48 m。
2.1.3 湿式净化器净化效率实验
磁化水进行降尘实验,分析降尘效率。设定实验水流量为10 L/min喷水降尘的时间为70 s,所用的粉尘为煤粉、粉尘浓度为10 mg/m3。
实验仪器:智能磁化细水雾降尘装置,激光粉尘检测仪,产尘器和扬尘器,空气压缩机。
实验步骤:取一定量的煤粉,放入产尘器漏斗中让其自由下落,打开扬尘器往实验室里吹粉尘,用粉尘检测仪检测实验室里的粉尘达到设定浓度时,减少产尘的量,以维持粉尘浓度的稳定,打开水箱阀门,智能磁化细水雾降尘装置的喷头开始喷水,产生水雾,记录数据,直到停止实验。
实验所得磁化水降尘效果曲线如图7所示。
除尘效率计算公式为:

式(1)中:η为除尘效率;c1为初始粉尘浓度;c2为采用降尘措施后的粉尘浓度。
2.2 绿化喷灌理论分析
2.2.1 蒸散量的计算
利用MATLAB的ANFIS工具在植物蒸散量的4个主要影响因素中选取2个误差最小的主要因素:日照时数和风 速[5]。以往年的日照时数和风速数据为样本,在7个隶属函数中选取误差最小的广义钟型隶属函数(gbellmf)并变换多次隶属函数的个数进行实验,得知2个输入变量的隶属函数均为5个时误差最小。利用MATLAB的ANFIS工具进行自适应的模糊推理,其中输入变量为2018年的日照时数和风 速[6],2个输入变量的隶属函数均设置为5个广义钟型隶属 函数。
模糊规则建立如图8所示,输入每日的日照时数以及风速可以得到每日植物的蒸散量,再将此量乘以同样用ANFIS工具模糊推理出的每日作物系数,即可得到每日特定植物的蒸散量。

图8 蒸散量模糊规则建立图
2.2.2 喷洒量的确定
为充分考虑蒸散量、降水和根系生长影响因素,本项目中设定灌水量等于灌水定额与灌水系数、根部保护系数和降水限制系数的乘积。
灌水系数的模糊推理。土壤有效水含量为计划湿润层土壤干容重1.3 g/cm3、土壤计划湿润层深度30 cm以及土壤含水率[0.21,0.3]的乘积,结果为[82,117]。
由2.2.1可知蒸散量范围为[0,12]。灌水系数1模糊推理系统以土壤含水量以及蒸散量为输入变量,输入隶属函数为三角型函数,输出为高斯隶属函数,输入语言变量划分为5个,输出划分为6个,模糊规则表如表2所示。
表2 模糊规则表
蒸散量土壤含水量 VLLMHVH VLHLVLVLVL LMHLVLVLVL MMHHMLVLVL HVHMHMLVLVL VHVHVHLMLVL
编写灌水量程序。当灌水系数乘以灌水定额小于一确定阈值时,置根部保护系数为0,否则为1。当天气预报显示有降雨时,置降水系数为0,否则为1。由于每日的土壤含水量数据不便于采集,这里采用水量平衡法估算每日的土壤含水量,编写算法程序,得到2018年灌水期共275 d内的灌水量柱状图,如图9所示,其中黑色为灌水量,灰色为降水量,总灌水量为465 mm。

图9 2018年灌溉期灌水量柱状图
2.3 风光互补理论分析
2.3.1 风力发电系统
基于本作品特性,风力发电系统选用螺旋形垂直轴风力发电机。该风力发电机较水平轴风机启动风速低,占据位置小,对于外界风向及风速变化适应性更强。


式(2)(3)中:为风机的输出功率;P为风轮的功率系数;为空气密度;为风轮扫掠面积;为风速;为风轮半径。
以武汉市为例,离地高10 m处年均风速为3.56~ 3.60 m/s,取3.60 m/s计算[7],风力发电系统的平均有效功率=126 W。
2.3.2 光伏发电系统
本作品所设计的光伏系统采用Sunpower24 V半柔性太阳能电池板,铺设面积为0.87 m2。在实际光照及温度条件下,发电功率约为81 W。太阳能电池板的额定功率1为0.10~0.12 kW/m2,光伏阵列额定功率=1×,其中为布置的太阳能电池板的面积。
据计算,太阳能电池板发电功率=1×=90 W。
以武汉市为例,年平均日辐射量为11.768 kW/m2,光伏阵列到负载的效率为0.85,即光伏阵列有效功率=×= 83 W。
3 节能减排效益评估
3.1 减排效益评估
以一根智能灯杆为评估对象,该灯杆运行一年的发电量约为1 830 kW·h。
根据国家碳排放计算器提供的资料,在实际生产过程中1 t无烟煤燃烧后排放二氧化碳质量2约为3 117 kg,因此可计算本作品可减少二氧化碳排放量2,2计算公式为2=21,可得单台装置一年可减少二氧化碳排放量约1.7×106t。
3.2 节水效益评估
根据《建筑给水排水设计规范》第3.1.4条,可推算出处于相对干旱地区的北京市市政绿化洒水年用水量的日平均值为2~3.0 mm。465÷275÷2=84%,465÷275÷3=56%,因此采用可以节约的水量为16%~44%。
2019年北京市道路绿化带绿化面积约为1.2亿平方米,总用水量为24~36万吨,至少可节约3.84万吨水。
3.3 节能减排效益总结
综上所述,单台本作品所述装置功率可达209 W,一年即可节约煤炭0.66 t,减少二氧化碳排放2.06 t。绿化灌溉系统一年可为北京市节约浇灌用水3.84万吨,在雾霾天气中能在3~5 min内有效去除20 m范围内的雾霾颗粒,节能减排效益凸显。
4 总结
以灯杆为载体,在上方模块化安装绿化喷灌系统、除霾装置和风光互补发电模块,可在一定程度上为城市的除霾、灌溉工程提供便利,同时为城市居民的生活带来极大的便利。按照现如今的发展趋势,国家对环境的保护越来越重视、城市智能化程度越来越高,未来智慧路灯的规模将会越来越大,运维的难度也将增大,本系统将会有更广阔的应用场景。
[1]钞涛涛,刘子闻.标准化引领新型智慧城市建设[J].上海信息化,2017(10):51-55.
[2]杨帆.智慧城市建设的误区和难点[J].计算机光盘软件与应用,2014(4):16-17.
[3]王英杰,徐付霞.空气质量指数及其含量的极值模型分析[J].哈尔滨商业大学学报(自然科学版),2019(3):373-379.
[4]王少剑,高爽,陈静.基于GWR模型的中国城市雾霾污染影响因素的空间异质性研究[J].地理研究,2020(3):651-668.
[5]温媛媛,郭青霞,王炎强.基于SEBS模型的岔口小流域蒸散量特征及影响因子研究[J].灌溉排水学报,2018(4):80-87.
[6]王鹏涛,延军平,蒋冲,等.华北平原参考作物蒸散量时空变化及其影响因素分析[J].生态学报,2014(19):5589-5599.
[7]裴婷婷,陈小平,周志翔.2007—2011年武汉市空气污染物时空分布特征[J].环境科学导刊,2014(2):43-47.
TU113.6+66
A
10.15913/j.cnki.kjycx.2020.14.007
2095-6835(2020)14-0023-04
周启沛(1999—),男,湖北钟祥人,本科在读,轮机工程专业。
〔编辑:王霞〕
猜你喜欢
小学生必读(低年级版)(2022年5期)2022-08-16
科技研究·理论版(2021年4期)2021-09-10
科技视界(2020年26期)2020-09-24
汽车零部件(2018年9期)2018-10-15
中国科技纵横(2018年13期)2018-08-31
安邸AD(2018年4期)2018-05-14
Coco薇(2017年7期)2017-07-21
科学启蒙(2015年11期)2015-11-28
科技与企业(2015年15期)2015-10-21
艺术与设计·理论(2014年1期)2014-03-31
