建筑物BIM 逆向建模数据处理研究
2020-07-24 07:18马建勇罗晓峰周立强吴立斌
智能建筑与智慧城市 2020年7期
马建勇,罗晓峰,周立强,吴立斌
(1.华汇工程设计集团有限公司;2.浙江工业职业技术学院)
1 引言
BIM(Building Information Modeling),意为建筑信息模型,是通过三维建模并建立建筑构件数据库来描述建筑物全部内容。BIM 是建筑业信息化,并走向智慧建造的最重要一环[1]。BIM 工作从设计到施工再到运行维护是正向操作,而从既有建筑物到数字模型的转化成为逆向建模。利用激光扫描和倾斜摄影的各自优点[2-3],可获得对大型建筑物和构筑物内外各面所有的坐标信息,这为BIM逆向建模提供了可能性。以吕府为例,重点研究在三维扫描和无人机倾斜摄影的工作完成后,如何对扫描数据和摄影照片进行有效处理,包括软件的选择、技术要点和处理方法的注意事项等[4-5]。
2 原始数据处理流程
在外业工作的基础上,利用Scene软件对高密度点云模型进行站点拼接与噪点处理,在控制点坐标一致的基础上,利用Context Capture 软件对点云模型与无人机测绘得到照片进行高度拟合并合成重建。原始数据处理的基本流程见图1。
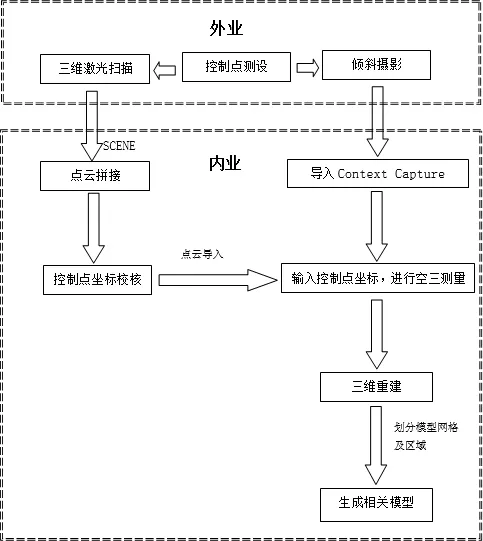
图1 数据处理工作流程
3 案例简介—以吕府为例
吕府是全国重点文物保护单位,建成于万历十一年(1583 年),位于浙江省绍兴市,其建筑占地规模东起万安桥,西至谢公桥,南临新河弄,北接大有仓,东西长167m,南北宽117m,占地面积约20000 ㎡,坐北朝南,总体布局以三条纵轴线、五条横轴线交织组成十三个封闭院落,当地俗称“吕府十三厅”。吕府作为明代极具代表性的古建筑,对其进行三维扫描和无人机倾斜摄影,以期建立精细且完整的数字化模型,为文物古迹的数字化存档提供技术支持。
4 数据处理关键技术研究—以吕府为例
以吕府为例,原始数据处理的关键步骤有以下几点:①激光扫描仪数据初步处理;②无人机倾斜摄影数据处理;③合成数据的处理。
详细处理过程如下:
①准备工作:找控制点、利用全站仪等传统测量工具测得各控制点的相对坐标;
②利用三维激光扫描仪进行扫描工作;
③导入Scene 软件,并进行目标拼接(目标注册);
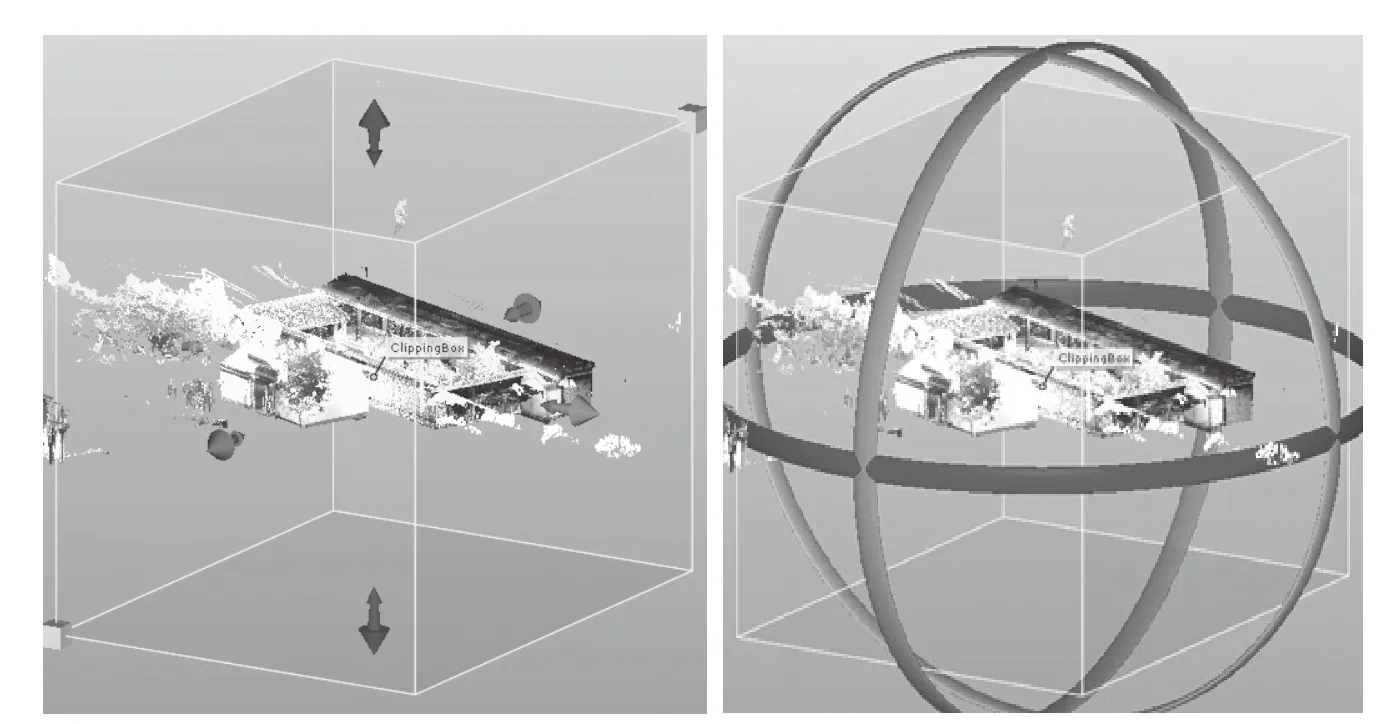
图2 去燥处理
④以创建虚拟点云的方式对结构进行去噪;
⑤坐标拟合,对模型进行校核;
⑥导出点云模型的e57 格式;
⑦在CC 软件中,导入点云、照片等数据;
⑧察看输入数据的完整性和3d 视角的合理性;
⑨航拍照片先进行空三测量,并在照片中寻找三个控制点,输入坐标,保证每个控制点有5 个以上刺点;
⑩提交重建,网格划分,建模区域划分,完成整个过程。
5 小结及几点注意事项
以吕府扫描为例,探索出了一套基于无人机倾斜摄影和三维激光扫描技术的建筑物BIM 逆向建模原始数据处理流程,在实际处理过程中,需要注意以下几点:
1)无关点云的删除
由于扫描仪扫到大量与目标建筑无关的外围点云,后期合成计算时,软件会无法辨别主次,导致模型错乱,建议采取站内裁切无关点云后再拼接的办法以提高建模的准确度。
2)多视角对齐
由于被扫描建筑物由多角度、多站点数据拼接而成,需要在不同位置设站进行多视角扫描,这些不同测站之间的点云数据需要对齐拼接,配套软件无法实现精确拼接时,需手动对齐,在拼接过程中要抓住建筑的关键标志线,如建筑的凹凸面、门窗洞口、室外台阶坡道等。
3)数据精简
由于扫描到的点云数据量非常庞大,后期拼接需要强大的硬件支持,在不影响平面及曲面重构且保证精度的情况下需要对数据进行精简,为达到这一目的,软件可以对点云进行抽稀处理,可以根据目标站点的具体情况进行不同量的处理,大平面可适当扩大抽稀程度,曲面抽稀时需注意,若抽稀过量会导致模型表面失真。
猜你喜欢
音乐天地(音乐创作版)(2022年1期)2022-04-26
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
建材发展导向(2021年12期)2021-07-22
全球定位系统(2021年1期)2021-03-26
中华诗词(2020年12期)2020-07-22
北京航空航天大学学报(2017年4期)2017-11-23
电子制作(2017年20期)2017-04-26
安全(2015年6期)2016-01-19
全球定位系统(2015年4期)2015-02-28