一种基于波峰寻找法的AGV色带导航技术
2020-07-16 03:02卢光旭
中国新技术新产品 2020年9期
卢光旭
(中国航空工业集团公司洛阳电光设备研究所,河南 洛阳 471400)
0 引言
近年来,AGV 行业发展迅速,越来越多的AGV 应用在物资配送、巡逻巡检、仓储管理等领域。AGV 的导航控制渐渐成为AGV 行业竞争的核心。目前AGV 的导航方式包括磁导航、色带导航、激光导航以及卫星定位导航等多种导航方式。就环境适应性来说,磁导航施工困难,激光导航要求环境固定、特征明显,卫星导航依赖于卫星信号的强弱。在环境特征单调、不明显,没有卫星信号的场所,采用铺设轨道导航的方式是优先选择。而磁导航需要在路面铺设磁条,施工困难,而且磁传感器工作距离一般在50 mm 左右,这就造成AGV 底盘低,通过性差。色带导航可在路面涂漆,施工方便。荧光导航是一种基于荧光感应原理的色带导航方式,具有精度高、可靠性高等优点,但是成本偏高。该文提出了基于波峰寻找法的色带导航,采用普通的可见光摄像机和照明,同样达到了较高的精度和可靠性,并且实现了对岔路口和弯道的自主导航。
1 算法描述
该文选择宽度为25 mm 的红色色带进行可见光识别和导航。可见光识别分为2 个步骤:色带颜色特征提取、波峰法寻找色带位置。
1.1 色带颜色特征提取
颜色空间是一个包含所有可能的三色刺激值(所有颜色和所有亮度)的三维空间。三色刺激的值不仅描述了颜色,也包含了亮度。在该文中,我们利用2 种颜色空间来提取色带的颜色特征,分别是RGB 和HSV。RGB 是常说的光学三原色,R 代表红色的值,G 代表绿色,B 代表蓝色。自然界中肉眼所能看到的任何色彩都可以由这3 种色彩混合叠加而成。在HSV 中,H 是色相,S 是饱和度,V 是亮度。色相是指主要颜色,即最近的光谱颜色;饱和度是指颜色的纯洁性,即缺少混合的白色。对R、G、B 每种纯色来说饱和度都是1[1]。基于以上颜色空间原理,我们采用如下公式对图像颜色空间进行特征提取:

式中:R,G,B 为图像RGB 空间三原色的值,s 为HSV 空间中的饱和度的值,r 为红色通道在R、G、B 三通道中所占的比重,k 为转换后的灰度图像。将图像中每个像素按式(1)和式(2)进行计算,可得到值k,并进行归一化,转换为灰度图像。转换后的图像如图1所示,可以看出,经过公式(2)变换后的图像,色带和背景的对比度更明显。
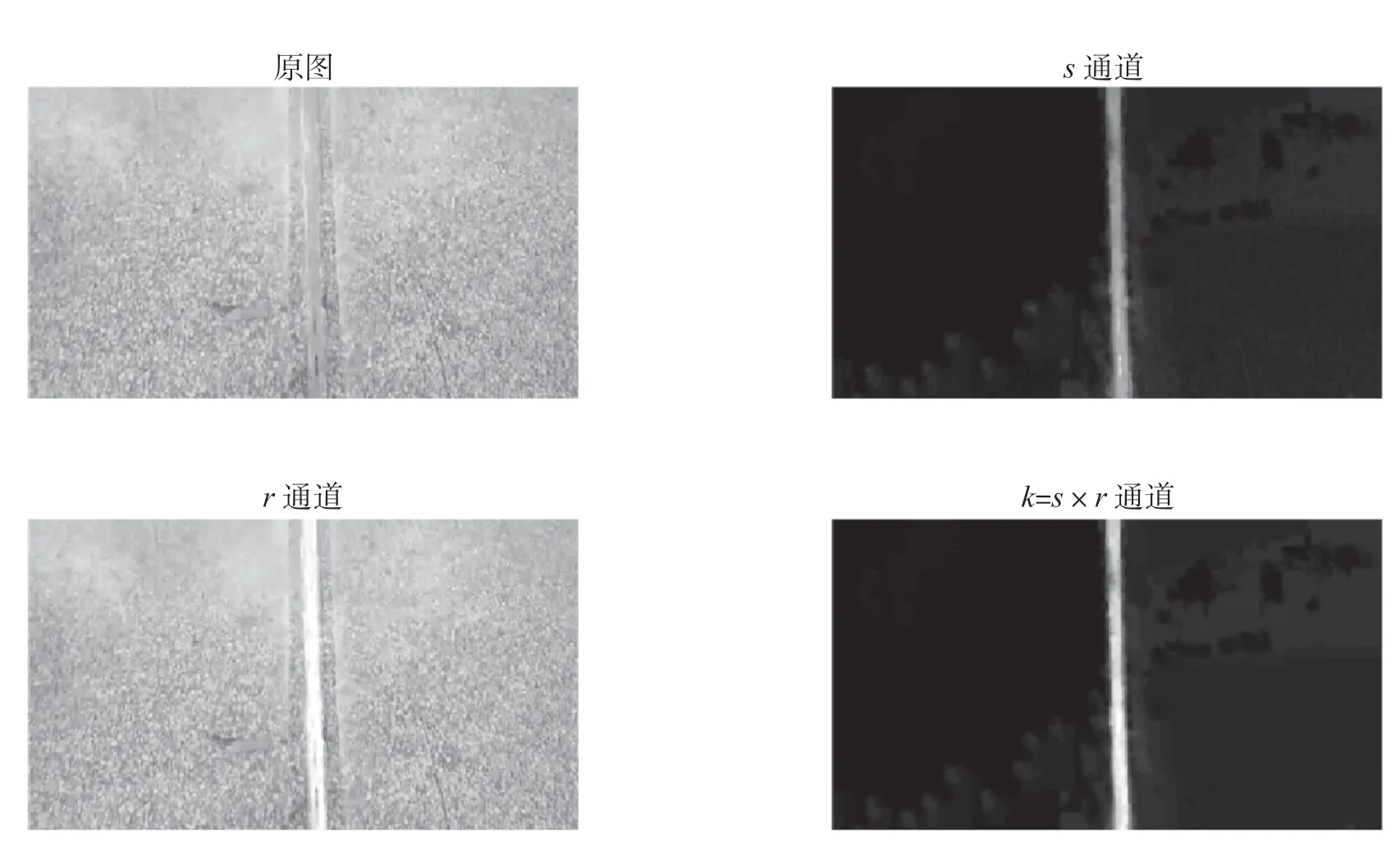
图1 色带颜色特征提取
1.2 波峰法找到色带
在该章节中,我们将要用波峰法,在提取颜色特征后的图像中找到色带的位置。在此,我们选取图像中的某一行进行处理。
1.2.1 计算阈值th1、th2
按如下公式(3)、(4)计算阈值th1、th2。

式中:α、β 是计算系数,在该文试验中α=1.3,β=1.5。W 是图像的宽度,line 是所选图像的行数,k 是颜色特征提取并归一化后的灰度图像,i 是图像像素所在的列,W 是图像的宽度。th1和th2是该文用波峰法计算色带位置需要的2 个阈值。
1.2.2 计算权重lineweight
按公式(5)计算lineweight。

式中:k 是颜色特征提取并归一化后的灰度图像,lineweight[m]表示以第m 个像素为起点,linewidth 个像素的灰度和。linewidth 由色带在图像中所占的像素宽度决定。该文中linewidth=30。lineweight[m]的计算结果如图2 所示。

图2 权重lineweight
1.2.3 寻找波峰
首先计算lineweight[m]的最大值(lineweight_max)及位置(L,L+linewidth)。L 是色带左侧像素序号, L+linewidth 是色带右侧像素序号。比较lineweight_max 与阈值th 的大小。如果lineweigth_max ≤th2,则认为目前图像中没有波峰。如果lineweigth_max >th2,则认为图像中有波峰。接下来从两侧开始,依次比较像素灰度k(line,left)、k(line,right)与th1的大小。看是否满足条件

图3 试验结果

找到满足条件的第一个left 和right,就是波峰的准确位置,也是色带再图像中的位置。
2 实验结果
该文选取了几种不用场景,不同颜色和宽度的色带和车道线进行测试,均能成功识别,如图3 所示。而且该文所提出的基于波峰寻找发色带定位的AGV 导引技术,运算量小,实时性高,也可用于自动驾驶领域。
3 结论
计算复杂度、稳定性和准确度是定位算法的关键性技术指标。该文提出的波峰伐色带定位技术,采用提取RGB 和HSV 2 个颜色空间的特征进行分析,通过计算单行的波峰位置找到色带的位置。该算法具有较高的定位精度和稳定性,对环境的适应能力也较高。算法简单,计算量小。可应用于AGV 自主导航、自动驾驶等领域。
猜你喜欢
水利规划与设计(2020年1期)2020-05-25
电子制作(2018年19期)2018-11-14
自动化学报(2017年11期)2017-04-04
中国医药指南(2016年1期)2016-07-11
科技尚品(2016年7期)2016-05-30
中国食品工业(2015年9期)2015-06-15
噪声与振动控制(2015年4期)2015-01-01
科技创新导报(2014年13期)2014-11-10
中医研究(2013年9期)2013-03-11