
ADS-B技术在雷达系统误差校正中的应用研究
2020-07-14 05:22鲁军
科学导报·学术 2020年75期
鲁军
【摘 要】ADS-B(Automatic Dependent Surveillance-Broadcast,广播式自动相关监视)技术是一种空中交通监视技术,利用卫星定位数据,向其他安装ADS-B系统的飞机和地面站自动广播自身的速度和位置等状态信息。通过ADS-B技术,可以依据雷达探测的飞机坐标数据和ADS-B获取的飞机位置信息,进行雷达误差分析和系统误差校正。
【关键词】ADS-B技术;雷达;系统误差
引言
雷达测量目标的测量数据中包括两种测量误差:一种是随机误差,可以通过滤波方法消除;另一种是随机误差,在相对较长的时间里可以看做是一个相对固定的值。为了提升雷达的探测精度,降低多雷达空情信息融合时系统误差带来的影响,需要及时地对雷达系统误差进行检查与校正。ADS-B技术具有数据精度高、使用成本低、监视能力强等特点。利用ADS-B数据自动广播的特性,可以获取雷达周边所有安装ADS-B系统的飞机实时位置信息,并用于雷达系统误差的标定。相对于雷达检飞标定的方法,该方法具有快速、简单和低成本等优势。
1.ADS-B技术概述
ADS-B技术是一种基于卫星定位信息和空-空、地-空数据链通信的航空器监视技术[1-3]。民航飞机通过GNSS(全球卫星导航定位系统)系统自主获取高精度的定位信息,并向其它安装有ADS-B的地面站用户和飞机自动广播其位置、速度等信息。ADS-B技术原理主要是自动、广播、相关与监视。其中,自动是指安装有ADS-B系统的飞机会自动向外发送数据而不需要地面询问和人工操作;广播是指ADS-B系统向发送信采取广播方式,附近列装有ADS-B设备的飞机和地面站用户都能接收和处理这些数据。相关是指ADS-B系统获取的飞机位置、速度、高度等信息来自于安装有ADS-B系统的飞机;监视是指利用获取的位置、速度等信息能够对飞机进行监视。由于ADS-B使用GNSS(全球卫星导航系统)进行定位,对比雷达测量目标的坐标精度,GNSS对目标的定位精度很高。通过ADS-B技术能够获取民航飞机的真实飞行数据,因此,可以利用ADS-B接收机获取到的ADS-B数据对雷达系统误差进行校正,将能很好地提升雷达探测能力。
2.雷达系统误差分析
系统误差是按一定的规律变化,或者是在多次重复测量中保持不变的误差。雷达系统误差是一个相对固定的值,其中包括斜距、方位和俯仰等系统误差,对于同一部雷达而言,产生系统误差的原因也多种多样,性质也不同。其中,主要原因包括以下三个方面:
(1)雷达设备误差
由于没有按规定要求操作雷达或者雷达自身设计的缺陷以及多次使用后造成雷达元器件老化而造成的。雷达方位系统误差的主要影响因素有:经纬仪寻北精度误差、天线的转台不完全水平引起的误差、机械轴与电轴的不完全平行引起的误差;影响距离系统误差的主要因素有:雷达定位误差、接收机内回波延迟误差、大气折射引起的误差;仰角系统误差的主要影响因素有天线平台水平误差和天线波束指向误差。
(2)理论计算误差
由于雷达测量目标所依据的理论公式是理想条件下的,而雷达实际使用环境不能达到理论公式所规定的要求所引起的误差。方位和仰角系统误差的主要影响因素有:信号处理方法引起的误差、测量量化引起的误差。距离系统误差的主要影响因素有:用光速代替空气中电磁波传播速度、测量量化引起的误差、信号处理方法引起的误差。
(3)个人操作误差
由于操作者在使用雷达时,因其个人的精神状态和运动器官的反应以及习惯性动作,导致在测量目标时而产生的误差。
3.ADS-B技术在航管雷达系统误差校正中的应用
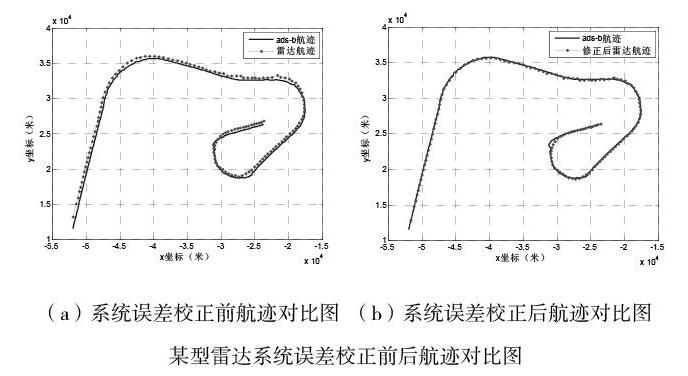
雷达探测空中目标得到的测量数据中主要存在两种类型的测量误差:随机误差与测量误差。其中,随机误差,是由雷达探测系统中的各类内部噪声引起的,每次探测目标的数据中随机误差都是不同的,但可以利用滤波的信号数据处理方法进行克服和消除[4-5]。而系统误差是由外部环境、雷达本身和操作手个人习惯等引起的,是非随机的、复杂的、慢变的;在相当长的时间里可以视为“恒定值”,是一种确定性的误差,难以通过滤波的方法消除,而需要事先对雷达的目标测量数据进行分析、估计,进而对各自的目标航迹进行误差补偿。如果存在系统误差,不同的雷达测量同一个目标就会产生不同的偏差,给雷达网系统量测数据关联和融合带来困难,导致雷达组网探测系统的性能下降。因此,通过系统误差校正,能够最大限度降低系统误差对雷达获取空情质量的影响。图中(a)所示为某型雷达系统误差校正前跟踪航迹与ADS-B航迹的航迹对比图,图中红色“-.-”线为雷达跟踪航迹,蓝色“-”线为ADS-B航迹,从图中对比可以看出,由于雷达系统误差的存在导致两条航迹存在较大偏差。针对航迹偏差问题,本文利用迭代最近点(ICP)算法[6]对该型雷达系统误差进行了校正,其方法主要分为以下几个步骤:一是将雷达测量数据与ADS-B数据进行坐标转换,确保两组数据处于同一坐标系;二是以ADS-B数据作为参考点集,以雷达测量數据作为目标点集;三是利用ICP算法求解雷达系统误差。校正结果如图中(b)所示,从图中航迹对比可以看出,经过系统误差校正,ADS-B航迹与该型雷达的跟踪航迹实现较好的吻合,表明利用ADS-B技术进行雷达系统误差校正方法可行。经过系统误差修正,该型雷达的测量精度有了较大的提升,探测、跟踪目标能力进一步增强。
4.结束语
借助ADS-B技术能够掌握空中民航飞机的准确飞行参数,可用以消除雷达系统误差,提升雷达测量精度。与雷达检飞相比,依托ADS-B系统开展雷达系统误差校正具有成本低、周期短、易操作的独特优势。深化对ADS-B技术的研究与运用,能够进一步提高雷达发现、跟踪目标能力。
参考文献:
[1]王锐,谢恺.基于ADS-B的目标指示雷达模拟训练系统关键技术[J].舰船电子工程.2020(5):77-79+107.
[2]唐鹏.基于ADS-B数据监视性能评估技术研究[D].天津:中国民航大学,2015.
[3]邵帅.ADS-B航迹处理及显示技术研究[D].哈尔滨:哈尔滨工程学,2013.
[4]王忠强.基于ADS-B的雷达系统误差校准算法研究[J].系统仿真技术.2016(1):30-34+45.
[5]张镭.多雷达数据融合的误差校正[J].四川兵工学报.2010(2):38-39.
[6]Pengfei Li,En Fan,Changhong Yuan. A Specific Iterative Closest Point Algorithm for Estimating Radar System Errors [J]. IEEE Access,2020(8):6417-6428.
(作者单位:陆军炮兵防空兵学院郑州校区)
猜你喜欢
科普童话·百科探秘(2020年5期)2020-09-14
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
黑龙江教育·中学(2018年1期)2018-04-02
中学生理科应试(2017年2期)2017-04-01
小学生导刊(高年级)(2016年11期)2016-11-14
中学物理·高中(2016年1期)2016-05-26
现代兵器(2016年4期)2016-04-27
少年科学(2015年7期)2015-08-13
卷宗(2012年5期)2012-10-21
