
基于谱聚类分析的跟车安全性能研究
2020-07-14 09:18付会通裴志豪刘兴亮刘世东张亚军
科学导报·学术 2020年25期
关键词:神经网络
付会通 裴志豪 刘兴亮 刘世东 张亚军


摘 要:针对智能驾驶系统安全性的需求,提出了一种对神经网络的虚拟驾驶员跟车安全等级评估的方法。以大量的自然驾驶数据为基础,利用神经网络学习驾驶员的驾驶行为,获得具有驾驶员驾驶习惯的虚拟驾驶员跟车模型,通过开放道路测试的方式对系统进行验证,并使用蒙特卡罗方法对虚拟驾驶员跟车的安全等级进行评估,通过对比得出安全等级。本文对基于神经网络的虚拟驾驶员跟车模型行为进行了评估,结果表明,虚拟驾驶员模型能准确地模拟待评估对象的驾驶行为,其驾驶数据十分接近自然驾驶数据,安全等级几乎与自然驾驶数据一致。
关键词:虚拟驾驶员跟车;神经网络;开放道路试验;蒙特卡罗方法
中图分类号:U461 文献标识码:A
1 前言
随着智能驾驶技术的兴起和主动安全技术的成熟,越来越多的智能驾驶汽车迫切需求更为安全的虚拟驾驶员,由于目前主动安全技术并不像被动安全技术那样完善,还没有得到广泛认可的评价测试方法[1]。目前,智能驾驶系统的测试及评估方法主要分为:智能驾驶开放道路测试、智能驾驶封闭场地测试、蒙特卡罗仿真。
开放道路测试的评价体系旨在搭建测试场景库(FOT),让驾驶员驾驶装有数采设备的智能车辆,进行长时间、宽领域、多场景的数据采集。例如欧洲的Euro-FOT,收入了欧洲数千万公里的驾驶数据,我国目前最完善的场景库为同济大学的China-FOT,由于我国交通异常复杂,智能驾驶开放道路测试及数据采集工作困难重重,仅完成了12.9万公里的数据采集。智能驾驶封闭场地测试多用于AEB测试,如Euro-NCAP将其分为:前方车辆静止CCRs、前方车辆低速前行CCRm、前方车辆紧急制动CCRb。蒙特卡罗方法是目前虚拟仿真的评估的主要方式,Kondoh[2]提出使用 TTC 的倒数与 THW 倒数的加权和来表征危险。李霖[3]在使用 1/TTC 作为跟车场景危险评价指标的同时使用期望减速来描述稳定跟车工况时的危险.
本文提出了一种虚拟驾驶员跟车的蒙特卡罗仿真评价方法,依据大量自然驾驶数据,以TTC和THW作为评价指标,通过对神经网络仿真结果与真实数据的对比分析,对虚拟驾驶员跟车的安全等级做出评价。结果表明,学习训练后的神经网络能准确地模拟出驾驶员的驾驶行为。
2. 安全等级评价体系
随着主动安全技术的发展,周期长、耗费高、需要大量人力物力的开放道路试验越来越不能满足各大主机厂的测试评估需要。为了加速智能驾驶系统的评价评估,本文提出了一种使用蒙特卡罗方法的虚拟驾驶员跟车安全等级评估方法。
2.1智能驾驶系统评价参数
本文提出的虚拟驾驶员跟车安全等级评估模型,采用最小车头时距(THW)和最小即时碰撞时间(TTC)作为的评价参数,通过划分不同等级实现跟车的安全等级评估,具体等级划分如下:
(1)最小车头时距:根据文献[3-5]的研究成果,将车头时距5s作为区别自由驾驶和跟车行为的阈值,最小车头时距的安全等级划分如表1所示。
(2)最小即时碰撞时间:参照文献[3-5]的研究成果,将最小即时碰撞时间进行等级划分,如表1所示。
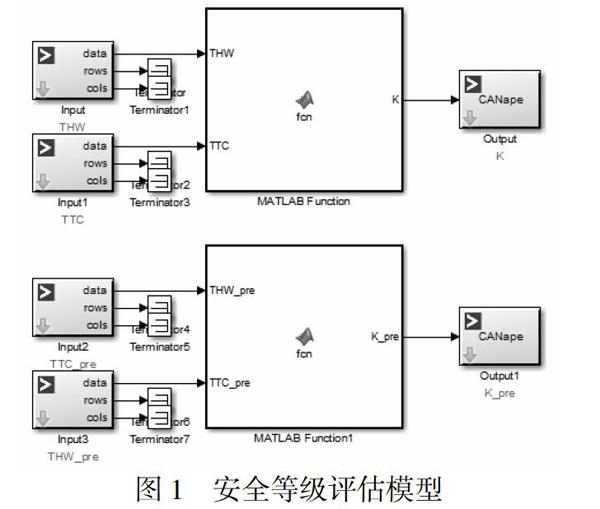
2.2 安全等级评估模型
联合CANape和simulink软件进行二次开发,对虚拟驾驶员跟车的安全等级评估模型进行搭建,模型装载于VECTOR工控机中,配合跟车场景挖掘程序,可以实时获得来自传感器和车辆总线传递的跟车数据。使用安全等级评估模型通过评估具有时间序列的跟车最小THW和最小TTC等参数,对比神经网络的THW和TTC预测值对跟车的安全等级进行划分。依据3.1中划分的5个等级,以THW和TTC的最低等级作为跟车安全等级K,其等级由低到高依次為:1级(非常危险),2级(较为危险),3级(一般安全),4(较为安全),5级(非常安全)。
该方法结合蒙特卡罗随机模拟和开放道路测试等方法的优点,利用道路测试获取大量的自然驾驶数据,将随机跟随目标的TTC和THW等级作为跟车的安全等级评估的统计量。
2.3 开放道路测试
为了验证虚拟驾驶员跟车的实际应用情况,采用开放道路测试的方式,对其进行整车在环、硬件在环测试,测试时间为2019年1月18日到2019年1月26日,测试行驶里程为3077km,测试地包括天津、石家庄、济南、南京、武汉、重庆、成都等。试验车为一款 B级车,数据采集设备有激光雷达和毫米波雷达,用于监测目标位置、姿态等信息;mobileye用于采集道路信息(车道线位置)和识别目标车辆信息;VECTOR工控机,负责收集记录数据以及数据的后处理。
本次开放道路测试采集跟车场景两千余例,限于篇幅原因,展示三段驾驶行程的驾驶场景安全等级评估和智能驾驶模型的跟车安全等级评估对比分析,如表2所示。为保障测试安全,测试车辆由真人驾驶,智能驾驶系统的驾驶数据由传感器采集数据计算获得。测试车辆配有全套数采设备,智能驾驶系统的输入本车速度和本车加速度由CAN总线输入工控机,车头间距和相对速度由毫米波雷达采集并实时输入。智能驾驶系统输出的下一时刻预测的本车与目标车的车头间距,原始数据和智能驾驶系统仿真模拟数据如图3-5所示。
2.4 开放道路测试安全等级评价结果
如图3所示,行程1的行驶工况为城市道路,总时长为58分钟,输出参数包括驾驶员跟车安全等级K和虚拟驾驶员安全等级K_pre。经过人工复查及对比分析,发现虚拟驾驶员跟车与真实驾驶员跟车安全等级完全一致。
如图4所示,行程2的行驶工况为高速公路,总时长为3小时15分,输出参数包括驾驶员跟车安全等级K和虚拟驾驶员安全等级K_pre。经过人工复查及对比分析,发现虚拟驾驶员跟车与真实驾驶员跟车安全等级几乎一致,仅有1次不同(毫米波雷达异常切换目标)。
如圖5所示,行程3的行驶工况为夜间城市道路,总时长为32分钟,输出参数包括驾驶员跟车安全等级K和虚拟驾驶员安全等级K_pre。经过人工复查及对比分析,发现虚拟驾驶员跟车与真实驾驶员跟车安全等级完全一致。
结束语
本文利用神经网络建立虚拟驾驶员纵向跟车模型,经过验证发现神经网络输出的车头间距与真实数据存在较小误差,误差在可接受范围内,而THW和TTC的曲线与真实数据几乎完全吻合,可以利用神经网络输出的THW和TTC对跟车进行安全等级评估。
本文以THW和TTC作为跟车安全等级的评价参数,联合CANape和simulink进行二次开发,设计一款使用蒙特卡罗方法的虚拟驾驶员跟车安全等级评估系统,通过道路测试对系统进行验证,结果表明虚拟驾驶员的安全等级与真实数据的安全等级完全一致。
参考文献
[1] Zhiyuan Huang,Ding Zhao,Henry Lam,et al. Accelerated Evaluation of Automated Vehicles Using Piecewi-se Mixture Models[J]. IEEE Transac-tions on Intelligent Transportation Systems,2018,19(9):2845-2855.
[2] Kondoh T,Yamamura T,Kitazaki S,et al.Identif-ication of visual cues and quantification of drivers perce-ption of proximity risk to the lead vehicle in car-fol-lowing situations[J]Journal of Mechanical Systemsfor Transportation and Logistics,2008 1(2):170-180
[3] 李霖,贺锦鹏,刘卫国.基于驾驶员紧急制动行为特征的危险估计算法[J].同济大学学报(自然科学版),2014,42(1):109-114.
[4] 《中国公路学报》编辑部.中国汽车工程学术研究综述·2017[J].中国公路学报,2017,3006:1-197.
[5] 曾翔宇.基于数据挖掘的列车智能驾驶模型研究[D].北京交通大学,2014.
猜你喜欢
客联(2022年3期)2022-05-31
中国教育信息化·高教职教(2022年4期)2022-05-13
计算技术与自动化(2022年1期)2022-04-15
计算技术与自动化(2022年1期)2022-04-15
计算技术与自动化(2022年1期)2022-04-15
计算技术与自动化(2021年2期)2021-11-10
西部交通科技(2021年9期)2021-01-11
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
