
改进FOC的三级式发电机多参数调压策略
2020-07-13 08:29刘勇智万宸旭鄯成龙
空军工程大学学报 2020年3期
刘勇智, 万宸旭, 李 杰, 鄯成龙
(1.空军工程大学航空工程学院, 西安, 710038; 2.空军工程大学研究生院, 西安, 710051;3.95503部队, 新疆和田, 848000)
航空三级式无刷同步发电机具有高转速稳定运行、高磁负荷、耐高温等优点,能够适应多种复杂飞行环境,极具可靠性,被广泛应用于飞机电源系统[1-2]。但是,多级式结构使得发电机输出电压调节须历经多个环节,导致调节性能不佳。同时,随着先进机载用电设备的发展,对发电机输出电能质量提出了更高的要求[3],传统单参数反馈电压调节已难以满足电源系统稳、动态性能要求。在现代控制研究中发现,多闭环控制可以改善动态性能[4],故本文将多参数反馈策略应用于三级式无刷同步发电机电压调节中。
由于反馈参数增加,控制难度陡增,控制策略选择显得至关重要。PI控制简单易于实现而被广泛应用,但对高度非线性强耦合的电机而言,单纯PI调节范围有限[5]。分数阶控制器具有细腻、柔性、对被控对象参数变化不敏感的特点,相比于整数阶控制器,具有更好的鲁棒性和动态性能,更适合于复杂系统[6-9]。但分数阶PIλ控制器仍然存在参数设定后,无法动态调整的问题。而电机受外界环境干扰较大,固定参数难以兼顾稳态和动态性能,无法达到最佳控制效果[10],故需要采用合理方式对控制器参数进行动态调节。
模糊控制是L.A.Zadeh[11]提出的一种智能控制方法,具有无须被控对象精确模型、抗干扰能力强等特点,能根据外部变化,实时调整控制器参数以改善其性能,使控制器能良好适应高阶、非线性、多参数强耦合系统,已被广泛应用于军事科学、航空航天等多个领域[12-14]。文献[15~16]将模糊规则与分数阶控制结合,应用于PEMFC系统和开关磁阻电机中,提高了实时性和抗扰能力,改善了控制性能。
1 三级式同步发电机数学模型
航空同步发电机采用三级式无刷结构,主要由副励磁机、主励磁机、主发电机、旋转整流器等部件构成。副励磁机采用永磁同步电机,主励磁机和主发电机采用电励磁同步发电机,其结构如图1所示。
忽略磁滞损耗及涡流损耗,假设产生的磁场在定子和转子之间按正弦分布,三相电压对称,经过park变换后,可以忽略0轴分量,建立主励磁机和主发电机电压方程及磁链方程。

图1 三级式无刷同步发电机结构
1.1 电压方程
对同步发电机进行电路等效,可以计算得到主发电机电压方程:
(1)
由于主励磁机中转子无阻尼绕组,则主励磁机电压方程为:
(2)
式中:Ud、Uq、id、iq、ψd、ψq是定子三相绕组park变换后的电压、电流和磁链;Uf、if、ψf为励磁绕组电压、电流和磁链;UD、UQ、iD、iQ、ψD、ψQ为转子直轴和交轴阻尼绕组电压、电流和磁链;ω为角速度。
1.2 磁链方程
根据电磁感应原理,可以得到主发电机磁链方程矩阵形式为:
(3)
同理,在不考虑阻尼绕组条件下,主励磁机磁链方程矩阵形式:
(4)
式中:L为绕组自感系数;M为两相绕组之间互感系数。
2 模糊分数阶多参数反馈调压策略
2.1 多参数电压调节策略
在传统航空三级式同步发电机电压调节中,采集调节点电压与参考电压进行比较得到电压偏差,将偏差输入调压器,通过调压器对主励磁机励磁电流大小的调节来实现对主发电机输出电压稳定的控制。但是,随着机载设备更新换代,大量电力电子设备应用于飞机电网中,影响电压稳定的因素增多,传统单参数调节很难满足电源系统动态及稳态需求。为妥善解决该问题,在单参数基础上,一方面,增加励磁反馈,根据发电机特性,得出主励磁机励磁电压与励磁电流的关系,将励磁电流作为反馈参数。另一方面,由于负载变化会导致发电机端电压出现大幅度波动,难以满足电能质量要求。为了更好地实现对负载扰动等变化的跟踪,提高对突加、突卸负载的适应能力,将负载电流作为补偿环节,加入到电压调节中,构成多参数调压控制器结构,见图2。多参数调节模式下,反馈的负载电流经计算得到相对应的励磁电流参考值,与电压偏差转换得到的励磁电流参考值相加,产生励磁电流给定值,反馈的励磁电流与给定值相比较而形成差值,经过转换得到励磁调节电路控制信号,通过励磁变化以实现对输出电压的稳定控制[4]。

图2 多参数调压控制器结构
2.2 改进分数阶控制器设计与分析
分数阶微积分的一般定义为:
(5)

在实际应用中,航空发电机为高度非线性系统,极易受到噪声的影响而产生振荡,微分环节对噪声有放大作用,会加剧电机振荡,故一般采用PI控制。但PI控制容易出现积分饱和而引起超调,且动态性能欠佳,对调压系统产生负面影响。而积分阶次λ可以使控制器在所选频率范围的低频段性能得到改善,有效抑制由积分环节饱和引起的超调,同时,能在一定程度上改善动态性能[6,8],故加入分数阶积分算子,构建分数阶PIλ控制器,其微分方程为:
(6)
式中:u(t)为输入;Kp为比例系数;Ki为微分系数;e(t)为输入误差。
对分数阶求解常采用Oustaloup滤波器方法,但是,在实际运用中,Oustaloup滤波器在所选频率段(ωa,ωb)边界处的逼近效果并不理想,为了确保在(ωa,ωb)的全频率段都具有较高的准确性、实用性,同时,为避免在电机控制中出现振荡,本文选取分数阶阶次α∈(0,1),引入常数值c、d组成适当的系数,对滤波器进行调整,改善其逼近性能[17]。则分数阶算子Sα可以被传递函数近似表示为:
(7)
由于0<α<1,且s=jω,c>0,d>0,则:
(8)
在所选取频率范围内,对传递函数进行泰勒展开,可以得到:
(9)
(10)
那么算子sα可以近似表示为:
(11)
将泰勒级数进行一级截断,则可以得到:

(12)
为验证改进后效果,选取阶次为0.3的算子s0.3,ωa=0.000 1,ωb=10 000,N=5进行验证,所得改进前后的Bode图如图3所示。
由图3可知,改进后的滤波器在所选频率段具备更好的逼近效果。
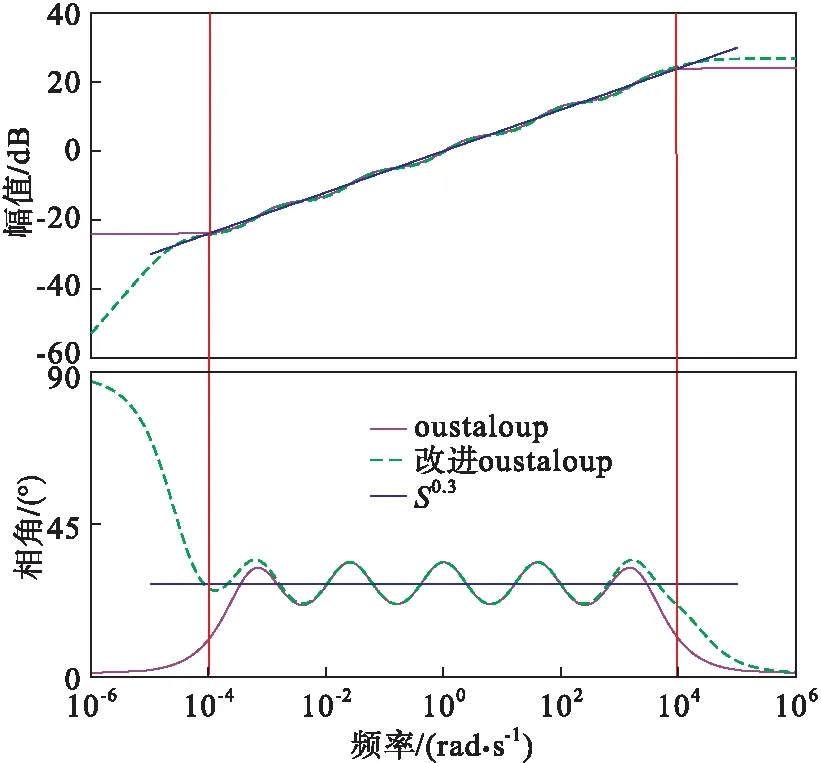
图3 改进前后oustaloup滤波器Bode图
2.3 模糊分数阶PIλ控制器设计
根据控制目标需求,模糊控制器输入为电压误差e(t)和误差变化率e′(t),输出为P、I、λ的变化量ΔP、ΔI、Δλ。选定量化因子,对输入e(t)和e′(t)进行模糊化,设定模糊论域均为[-0.3,0.3],同时,设定ΔP、ΔI的模糊论域为[-2,2],Δλ的模糊论域设置为[-0.5,0.5],隶属度函数选取三角形函数,模糊子集数N=7,分别用NB、NM、NS、Z、PS、PM、PB表示,模糊规则制定主要依据以下几方面[18-19]:
1)当e(t)较大时,为在短时间内消除误差与超调,选择较大积分阶次λ和较小积分系数I、较大比例系数P;当e(t)较小时,防止电机发生振荡,同时减小稳态误差与超调,应当选择较小积分阶次λ和减小λ、P。
2)当突加、卸负载等扰动发生时,e(t)和e′(t)会出现异号和同号情况,异号时,被控量偏离预期值,选取较小比例系数P;同号时,被控量趋向预期值,需选取较大积分阶次λ和较小积分系数I。
根据上述规则和系统测试基础,总结经验并制定了ΔP、ΔI、Δλ模糊规则表。分数阶控制器核心参数Δλ的模糊推理表和空间曲面图见表1和图4。
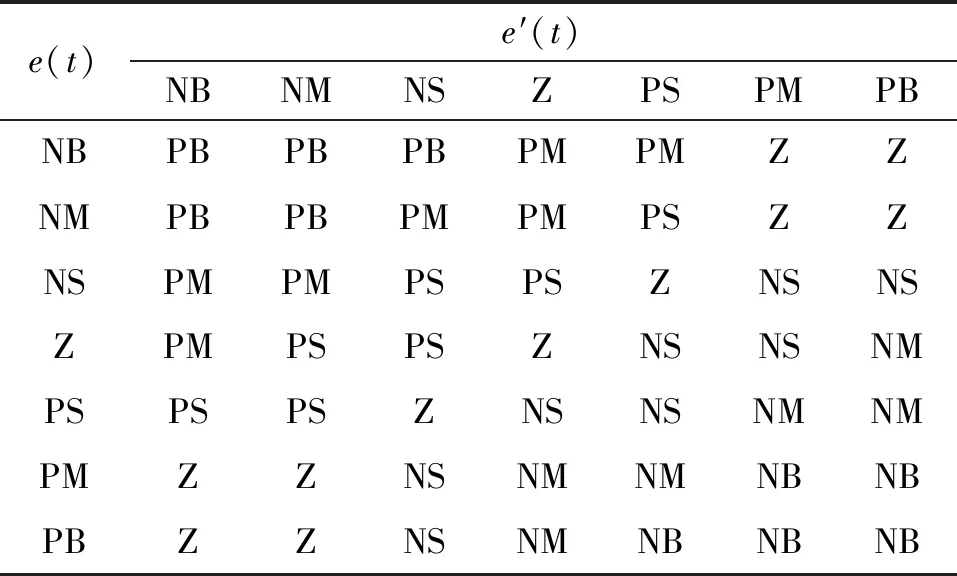
表1 Δλ模糊推理表

图4 Δλ空间曲面图
3 仿真试验及结果分析
为验证本文所提控制算法的有效性和实用性,首先,利用JMAG搭建电机模型,进行电磁场分析,获取电机的互感和自感;随后,根据式(1)~(4),基于MATLAB/Simulink建立了主励磁机和主发电机核心模块;最后,构建副励磁机、整流器和连接电路,搭建了航空三级式同步发电机系统仿真平台。分数阶控制部分通过在MATLAB中编写函数来实现,引入的常数值c=10、d=9。模糊规则通过S-function与分数阶控制器相连,实现参数的传递和更新。发电机关键参数如表2所示。

表2 同步发电机关键参数
3.1 单参数与多参数对比试验
为验证多参数调压效果,设定在额定转速12 000 r/min条件下,对传统单参数调压和多参数调压进行对比试验,在发电机建压稳定后,分别在2.5 s和4.5 s进行突加和突卸0.5倍负载试验,所得输出电压有效值、励磁电流对比波形如图5所示。
由图5可以看出,在发电机建压阶段,单参数反馈时,输出电压在0.50 s时达到峰值122.4 V,超调量为6.4%,发电机在1.52 s达到稳定状态;多参数反馈时,输出电压在0.47 s达到峰值119.5 V,超调量为3.9%,发电机在1.29 s达到稳定状态。在突加、卸负载阶段,2种控制电压跌落和上升值相同,单参数反馈分别在3.54 s和5.46 s达到稳定状态,多参数反馈在3.18 s和5.12 s达到稳定状态。由此可知,相比于单参数反馈,多参数反馈控制建压超调减少2.5%,建压调节时间减少0.23 s,有助于电机实现快速建压,并能减小电子器件受压值,增强使用寿命。当负载突变时,多参数反馈作用下,调节时间明显缩短,具有更快的响应速度,可以有效改善电压调节系统的动态性能。但是,多参数反馈下,超调现象仍然存在,系统还有待进一步改善。


图5 单参数与多参数对比示意图
3.2 不同积分阶次对比试验
为有效验证加入积分阶次PIλ后,PI相比于PI控制更加柔性、细腻,增强控制器参数变化灵活性,有效抑制超调,在多参数反馈基础上,选取额定转速12 000 r/min,λ在区间[0.1,0.9]内每间隔0.1进行取值,选择滤波器阶次5,进行建压试验和2.5 s、4.5 s时突加负载、突卸0.5倍负载试验,所得输出电压有效值波形如图6所示。
由图6可以看出,在建压阶段,随着λ阶次从0.1逐渐增大至0.9,达到稳态时间从0.12 s增大到0.98 s,响应速度随积分阶次增加而变缓。当阶次λ小于0.5时,在多参数基础上,可以进一步提高响应速度,并且实现无超调建压,大大改善了发电机建压过程。在突变负载阶段,阶次λ越小,对扰动响应越快,但是,相比于整数阶,随着分数阶控制器积分阶次λ减小,输出电压有效值稳态误差增大,以上结果表明,固定参数控制器难以同时具备优良的动、稳态性能,故需要对分数阶控制器进行优化改进,使参数P、I、λ可动态调整,能够在有效抑制超调时,兼顾稳态性能。



图6 变阶次输出电压有效值示意图
3.3 模糊分数阶对比试验
为使分数阶控制器能兼具各阶次性能,引入本文制定的模糊规则,实现对分数阶参数在线调整。为验证其效果,在额定转速12 000 r/min,多参数反馈条件下,对模糊分数阶调压控制器进行建压和2.5 s、4.5 s突加、突卸0.5倍负载试验,得到输出相电压波形如图7所示。同时,为凸显本文所提方法较传统控制方法的改进,将模糊分数阶PIλ控制器与单参数反馈控制器进行对比,所得励磁电流与输出电压有效值波形如图8所示。

图7 模糊分数阶控制器相电压波形
由图7可知,加入模糊规则后,分数阶PIλ控制可以实现快速、无超调、平滑的建压,并且无稳态误差。结果表明,模糊分数阶控制器能够同时兼顾动态和稳态性能,具备更强抗干扰能力。由图8可知,在模糊分数阶控制器作用下,发电机在0.87 s时完成建压,达到稳定运行状态,相比于单参数控制,建压时间缩短了42.76%,超调量减少了6.4%;在突变负载阶段,分别在2.97 s和4.98 s恢复到稳定状态,与单参数调节相比,调节时间缩短了0.57 s和0.48 s,调节时间分别减少了37.01%和32.88%,体现出对外界干扰有更好的调节性能,更有利于飞机在各种复杂环境中稳定飞行。

图8 单参数和模糊分数阶对比
4 结论
1)在传统单参数反馈调压方式的基础上,增加励磁电流和负载电流反馈,构成多参数调压控制,实现了对负载突变等外界变化的有效跟随,提高了控制器的动态调节性能。
2)利用分数阶微积分细腻、柔性的特点,以分数阶PI控制取代电压反馈环中的整数阶PI控制,增加了一个可调节参数,使控制器灵活性得到加强,可以消除建压超调,改善建压阶段性能,同时,进一步提高调节速度。
3)将模糊规则引入到PIλ控制器中,使控制器突破了参数固定的束缚,能够根据电压误差和误差变化率,在线整定控制器参数,分阶段对电压快速无差的进行调节,具有较强的抗干扰能力,兼具优良的动态和稳态性能,能更好地满足电压调节的实际需求。
猜你喜欢
大电机技术(2022年3期)2022-08-06
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
防爆电机(2022年1期)2022-02-16
故事作文·高年级(2021年12期)2021-12-21
红领巾·探索(2020年2期)2020-05-19
汽车与驾驶维修(维修版)(2020年1期)2020-04-02
汽车实用技术(2019年24期)2019-12-27
电子制作(2019年7期)2019-04-25
价值工程(2017年28期)2018-01-23
