
MIMO雷达在防空系统中的应用分析
2020-07-12 04:07马跃华孙海涛
空天防御 2020年2期
马跃华,王 磊,孙海涛,余 科
(上海机电工程研究所,上海 201109)
0 引 言
多输入多输出(MIMO)雷达作为一种新体制雷达,由于其具有更高的角度分辨率、更多的自由度等优点倍受研究者关注[1-4]。随着理论研究的深入与技术成熟度的提高,MIMO雷达已经开始应用到防空系统中[5]。分析MIMO雷达的优势与不足,是充分发挥MIMO雷达效能、提高武器系统总体能力的关键。
FISHLER等人在2003年IEEE的雷达年会上首先提出了MIMO雷达的概念[6]。文献[7]分析了分布式MIMO雷达的性能,分布式MIMO雷达采用距离较远的天线发射或接收电磁波,充分利用了空间分集带来的优势,可以克服目标雷达散射面积(radar cross section,RCS)角度闪烁的问题。文献[8]指出分布式MIMO体制可以有效提高雷达的检测性能。但是,由于分布式MIMO雷达在网络化协同、系统同步等方面还存在诸多问题,尚不具备工程应用条件。共址 MIMO 雷达(也称为密集式MIMO雷达)天线之间间隔很小,天线阵列对于探测目标通常满足菲尼尔近似,各个发射天线发射相互正交的波形,在接收端通过匹配滤波将各个发射波形分离出来,从而形成一个远大于实际阵列的等效阵列[9]。共址MIMO雷达利用了波形分集带来的优势,具有更高的角度分辨率[10]。但是,现有文献多是针对单个指标进行分析论证,并没有对共址MIMO雷达性能进行系统分析,造成了它应用于武器系统中时论证困难。
本文从防空系统的需求出发[11-12],分析共址 MIMO 雷达在探测威力、测量精度、数据率和抗干扰能力方面相对相控阵雷达的优势与不足,为促进其工程应用提供理论支撑。首先给出了共址MIMO雷达模型,并分析了其性能;然后对波束合成后的信噪比、波束宽度进行了仿真试验,验证其性能。后续文中所提及的MIMO雷达均指共址MIMO雷达。
1 共址MIMO雷达模型
考虑共址单基地MIMO雷达,具有M个发射阵元,N个接收阵元,都分布在x轴上,横坐标分别表示为um(m=1,2,…,M)和vn(n=1,2,…,N)。发射阵元发射相互正交的波形,每个接收阵元端都有一个匹配滤波网进行发射波形的分离。假设在远场点q存在一个目标,距离为r,角度为θ,反射系数为β。MIMO雷达系统结构如图1所示,图中T、R分别表示雷达的发射组件和接收组件,MF表示匹配滤波器组。
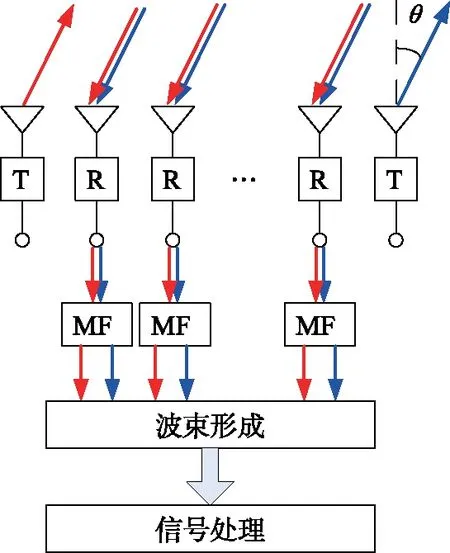
图1 MIMO雷达系统结构Fig.1 Structure of MIMO radar system
MIMO雷达第m个发射阵元所发射信号波形表示为
sm(t)=pm(t)exp(j2πfct)
(1)
式中:pm(t)为发射信号的归一化包络;fc为载波频率;t为时间。MIMO雷达发射波形为正交波形,假设其具有理想的自相关和互相关特性,即相关函数可以表示为
(2)
式中,τ为相对时延。
点目标q处的MIMO雷达照射信号为
(3)
式中,τmq为第m个发射阵元到q点的传播时延,远场条件下有
(4)

(5)
式中:c为电磁波传播速度;λ表示发射信号波长。
经过空间目标反射后,第n个接收阵元接收到的回波信号为
sn(t)=βsq(t-τmqn)+en(t)=
(6)
式中:τmqn为从第m个发射阵元发射经q点反射后到达第n个接收阵元的时延;en(t)为第n个接收阵元处的噪声,假设en(t)为加性高斯白噪声,其功率谱密度为N0/2,en(t)与发射信号不相关,不同阵元处的噪声也互不相关。
根据目标的远场假设,可以得到
τmqn≈(2r-(um+vn)sinθ)/c
(7)
(8)
对接收信号进行相干检波,去除载波后再利用第m′个基频信号pm′(t)对第n个接收信号进行匹配滤波,匹配滤波器输出的信号分量为

(9)
式中:Rmm′(t)表示发射波形的相关函数,根据发射信号的相关特性可知,第2个连加项约等于零,将其忽略,则式(9)可简化为
sm′n(t)=βexp(-j4πfcr/c)exp(j2π(um′+vn)sinθ/λ)Rm′m′(t-2r/c)
(10)
从式(10)可以看出,MIMO雷达中利用第m个发射波形对第n个接收信号进行匹配滤波,可以分离出通道m→n的信号,在接收端利用一组匹配滤波器对M个发射信号进行分离,可以得到经过M×N个不同通道的信号,相当于形成了一个阵元数为M×N的等效阵列。
补偿掉与角度有关的相位项,对等效阵列M×N个信号进行波束合成后得到的信号分量为
z(t)=MNβexp(-j4πfcr/c)R(t-2r/c)
(11)
式中:R(·)为发射波形的自相关函数。
如果各个发射阵元发射同一波形的不同相移,并省去接收端的波形分离,则上述雷达模型与相控阵雷达模型一致。相控阵雷达对于指向θ角度的发射波形如式(12)所示。
sm(t)=p0(t)exp(-j2πumsinθ/λ)exp(-j2πfct)
(12)
式中,p0(t)为相控阵雷达发射波形。
相控阵雷达在目标q点处的照射信号为
sq(t)=Mp0(t-r/c)exp(-j2πfcr/c)
(13)
相控阵雷达第n个接收阵元处信号为
sn(t)=Mβp0(t-2r/c)exp(-j4πfcr/c)exp(j2πvnsinθ/λ)+en(t)
(14)
匹配滤波并波束形成后,输出的信号分量为
z(t)=MNβexp(-j4πfcr/c)R(t-2r/c)
(15)
2 共址MIMO雷达性能分析
2.1 威力分析
主要通过分析波束形成输出端的信噪比来评估雷达探测威力。考虑在特定t0时刻使得信噪比(signal to noise ratio,SNR)最大,则在该时刻MIMO雷达等效阵列波束形成输出端的信号分量的功率为
|z(t0)|2=|MNβR(t0-2r/c)|2=|MNβE|2
(16)
式中:E表示发射波形pm(t)的能量;t0=2r/c。
MIMO雷达接收阵元处的噪声经过匹配滤波器组后,第m×n个等效阵元处的噪声如式(17)所示,记作e′i(t)。
(17)
由于不同阵元处噪声不相关,且发射波形正交,所以不同虚拟阵元处的噪声也互不相关。虚拟阵列波束形成后,噪声分量的功率为
(18)
式中,f为频率。
t0时刻MIMO雷达虚拟阵列波束形成后的信噪比SNR为
(19)
同理,可以推出相控阵雷达波束形成输出端的信号分量的功率为
|z(t0)|2=|MNβR(t0-2r/c)|2=|MNβE|2
式中:t0=2r/c
(20)
相控阵雷达接收阵元处的噪声经过匹配滤波器组后,第n个阵元处的噪声如式(21)所示。
(21)
相控阵雷达波束形成后,噪声分量的功率为
(22)
t0时刻相控阵雷达虚拟阵列波束形成后的SNR为
(23)
比较式(19)与式(23)可以看出,同样目标条件和发射功率情况下,相控阵雷达获得的信噪比是MIMO雷达获得的信噪比的M倍,这是MIMO雷达接收端匹配滤波器组造成的。由于雷达最大探测距离与信噪比的1/4次方成比例[13],因此可以算出,同样发射功率和相干处理增益条件下,MIMO雷达探测威力是相控阵雷达的1/M1/4。
2.2 精度分析
1) 距离测量精度分析
雷达对目标距离的测量精度取决于信号的瞬时带宽和信噪比,信噪比SNR≥4的情况下,雷达测距精度σr可以近似表示为
(24)
式中:Tp表示脉冲宽度,对于采用脉压技术的雷达,Tp为脉压后的脉冲宽度;kr为脉冲斜率系数。

2) 角度测量精度分析
雷达对目标角度测量精度取决于天线波束宽度和信噪比,信噪比SNR≥4的情况下,采用单脉冲测角方法可以获得的测角精度σθ近似为
(25)
式中:θ3为天线的半功率波束宽度,对于相控阵雷达θ3为接收天线阵列的半功率波束宽度,对于MIMO雷达θ3为匹配滤波后形成的虚拟阵列的半功率波束宽度;kθ为方向图斜率系数。对于经过优化设计的MIMO雷达阵列,其虚拟阵列孔径长度是接收阵列孔径长度的M倍,因此MIMO雷达波束宽度是相控阵雷达波束宽度的1/M。

2.3 数据率分析
考虑电扫模式下完成一个区域搜索的数据率,假设区域方位角范围为Ω。相控阵雷达的搜索时间为
(26)
式中:Tr为雷达信号重复周期;l为脉冲累积个数。
对于MIMO雷达,由于发射端全向发射,不形成发射波束,因此单次照射可以覆盖整个搜索区域,可以认为MIMO雷达的搜索时间只受重复周期和脉冲积累个数限制,其搜索时间为
Ts2=lTr
(27)
因此,在相同脉冲宽度和脉冲积累个数的情况下,MIMO雷达的区域搜索数据率理论上要高于相控阵雷达。
2.4 抗干扰能力分析
1) 可对消干扰源个数分析
MIMO雷达匹配滤波之后形成的虚拟阵列阵元数为MN个,因此MIMO雷达进行自适应波束形成时的自由度为MN,可以同时对消MN-1个干扰源。而相控阵雷达自由度为接收阵元个数N,只能对消N-1个干扰源。
2) 被截获概率分析
MIMO雷达在目标点q处的照射信号功率为
(28)
相控阵雷达在目标点q处的照射信号功率为

(29)
比较式(28)与式(29),在目标处MIMO雷达的照射信号功率是相控阵雷达的1/M,这是由于MIMO雷达所发射的正交波形在空间不会相干叠加。更低的照射功率带来的好处是更低的被截获概率,因此MIMO雷达的被截获概率要低于相控阵雷达的被截获概率。
3 仿真验证
从前面分析可知,导致MIMO雷达性能与相控阵雷达性能差异的主要因素是信噪比、波束宽度。因此,主要对波束合成后的信噪比、波束宽度进行仿真试验,得出雷达探测威力、测量精度和抗干扰能力的差别。
3.1 信噪比仿真分析
进行仿真时,MIMO雷达采用4个发射阵元,在x轴上坐标分别为-15λ/2、-5λ/2、5λ/2、15λ/2; 采用10个接收阵元,均匀分布在5λ/2到2λ之间的x轴上。MIMO雷达发射波形采用码分正交波形,每个发射波形包含码元数为100个,载频为10 GHz,带宽设为50 MHz,相应的码元时宽为0.02 μs,脉冲重复周期为6 μs,采样频率等于3倍带宽。假设搜索区域存在一个点目标,坐标是(0 m,550 m),对应的极坐标为(550 m, 0°),反射系数为1。仿真时不考虑信号的空间路径损耗,因为MIMO雷达的路径损耗和相控阵雷达是一样的,并不影响最终的比较结果。图2为波束合成后的雷达接收信号比较。
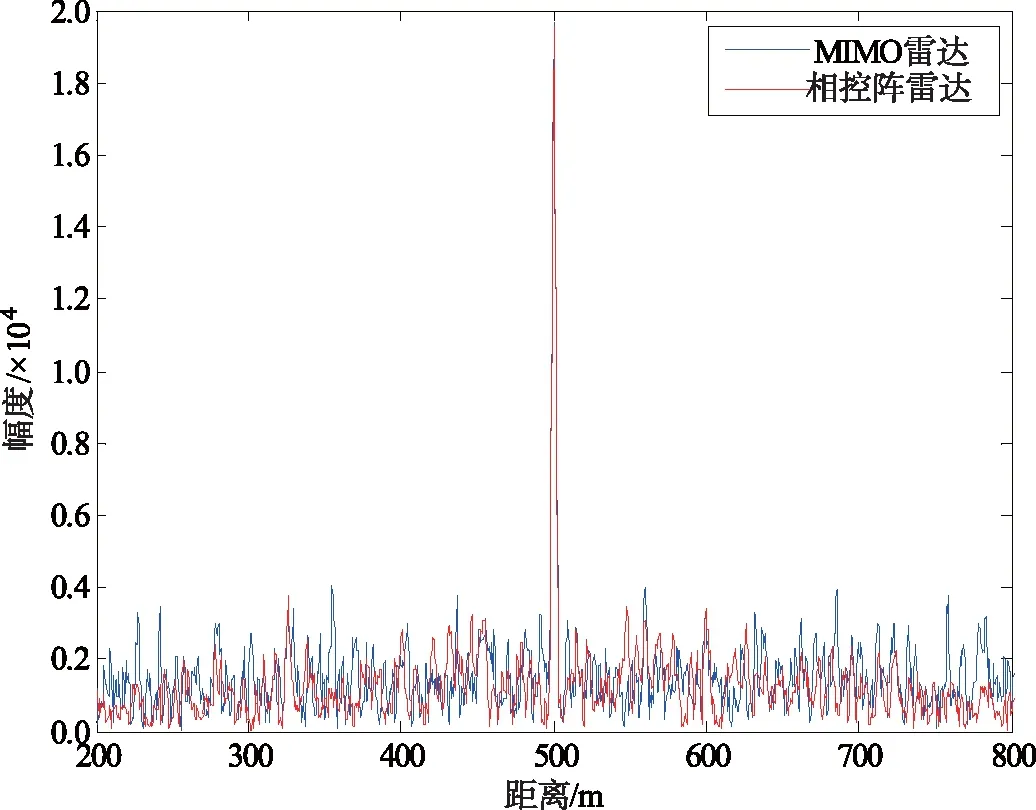
图2 波束合成后的雷达接收信号比较Fig.2 Radar received signal comparison after beamforming
从图2可以看出,在目标距离500 m处MIMO雷达与相控阵雷达具有基本相同的峰值,这是目标回波造成的。而在没有目标的距离单元处,MIMO雷达的噪底明显要高于相控阵雷达的噪底。为了进一步比较MIMO雷达与相控阵雷达的接收信号噪声差异,给出了不同噪声方差下的MIMO雷达接收信号中噪声功率NMIMO与相控阵雷达噪声功率NPA的比值,噪声方差从1到1 000,仿真结果如图3所示。

图3 不同噪声水平下的雷达接收信号比较Fig.3 Radar received signal comparison under different noise levels
从图3可以看出,MIMO雷达接收信号中的噪声功率始终是相控阵雷达接收信号噪声功率的4倍左右,这与此前的理论分析是一致的,MIMO雷达虚拟阵列端波束合成后的信噪比是相控阵雷达的1/M。
3.2 波束宽度仿真分析
仿真条件同信噪比仿真试验条件,MIMO雷达虚拟阵列端波束方向图和相控阵波束方向图如图4所示。

图4 MIMO雷达与相控阵雷达波束方向图Fig.4 Beam patterns of MIMO radar and phased array radar
从图4中可以看出,MIMO雷达的角度分辨率要高于相控阵雷达的角度分辨率,这说明MIMO雷达的角度精度更高。另外,MIMO雷达波束方向图中的零陷数量要远远多于相控阵雷达波束方向图中的零陷数量,因此可以对消的干扰源个数就更多,这是由于MIMO雷达形成了一个阵元数远大于实际阵列阵元数的虚拟阵列。
4 结束语
本文从防空系统总体需求出发,分析了MIMO雷达的探测威力、测量精度、数据率和抗干扰能力。与相控阵雷达相比,MIMO雷达探测威力和测距精度均有所下降,但测角精度更高,被截获概率更低,可以对消的干扰源个数也更多。由此可见,MIMO雷达更加适用于近程末端防空系统,可以充分发挥其数据率高、精度高、抗干扰能力强的优势,同时可避免探测威力不足的劣势,大大提高整个系统的作战效能。当MIMO雷达应用于中远程防空系统时,为弥补探测威力的不足,在发射机功率一定的情况下需要增加脉冲积累时间,以提高信噪比,但是这会导致数据率下降。另外,子阵MIMO雷达作为MIMO雷达与相控阵雷达的折中,可以在探测威力和自由度之间寻找合适的平衡,也是一种可行的方案。综上所述,MIMO雷达作为一种新体制的雷达,可为防空系统的设计带来一种更加灵活的探测系统方案,在工程应用中需要根据不同的使用场景进行相应设计,从而有效提升系统总体效能。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
航天制造技术(2022年2期)2022-05-16
现代仪器与医疗(2022年1期)2022-04-19
北京理工大学学报(2021年12期)2022-01-13
北京理工大学学报(2021年8期)2021-09-14
舰船电子对抗(2021年2期)2021-06-16
现代信息科技(2021年21期)2021-05-07
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04
少年科学(2015年7期)2015-08-13
