
Matlab环境中机构运动仿真分析的不同方法比较研究
2020-07-11 14:41张洪双安翠翠王义斌楼力律庄曙东
实验室研究与探索 2020年5期
张洪双,安翠翠,王义斌,楼力律,庄曙东
(河海大学机电工程学院,江苏常州213022)
0 引 言
机械原理课程是机械工程专业的专业基础课,在知识结构中起到了承上启下的作用。平面机构运动学分析是课程教学中非常重要的一部分内容。现代化的机械产品中机构运动状态日趋复杂,机构运动特性是评价机械产品的一个重要指标。运动学分析运算也越来越重要[1]。
机构运动分析的常用方法有图解法和解析法。图解法简单、直观,但精度较低,适用于分析某些特定位置的运动参量,对整个循环周期的分析求解则工作量很大[2]。
工程中常用的解析法,主要包括以下几种方法:
(1)对具体机构建立坐标,根据结构形式推导位置方程,然后求导等,利用程序求解出位移、速度、加速度等参量。该方法适于一些结构相对简单的机构,且不同机构需要编制不同的程序[3-4]。
(2)用差分法代替了上述过程中的求导过程,通过Matlab工具模拟机构的运动,设置很小的模拟步长,实现很高精度的点运动轨迹,该方法需要有较好的数学基础[5]。
(3)杆组法,按照机构组成原理将机构分解成基本杆组,然后对不同杆组类型编制子程序,使用时根据机械系统组成形式编制主程序,分别调用相应子程序,形成一个完整的机构分析系统。该方法适用于较复杂的多杆机构分析,编程工作量较大[6]。
计算机仿真方法使机构运动分析变得直观、明了。与传统的C、Fortran等语言相比,Matlab语言的编程方式语句简单、易于掌握,丰富的可视化功能和高效的仿真模块等使其在机构运动学分析中可以更有效解决问题,提高建模速度,且利于理解和掌握[7]。本文结合该软件的特点,分别采用了常规编程、simulink 积分仿真、simMechanics 仿真模块等方法对机构运动学进行分析,比较了不同方法的特点,并得出了一些经验和结论[8]。
1 模型的建立
曲柄滑块机构是机械中常用的机构之一,可以实现旋转运动到直线运动的转换,在内燃机、往复式抽水机、空气压缩机、公共汽车车门以及冲床等设备中得到应用,其原理如图1 所示[9]。
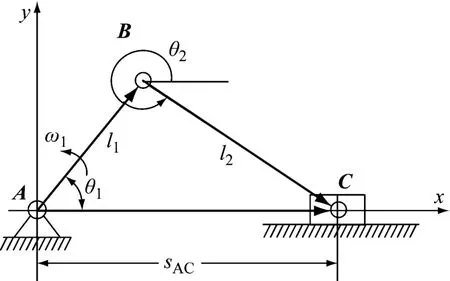
图1 曲柄滑块机构模型
对曲柄滑块机构建立图1 所示的坐标系,将各杆长表示为矢量,在封闭矢量三角形ABC 中,建立封闭矢量方程:

其复数形式表示为

将上式的实部和虚部展开,其具体形式为

由式(3)可知,

对式(2)对时间t求导,将实、虚部分别展开得到速度关系,列成矩阵形式为:求解式(5)可得角速度ω2和线速度vC。

将式(2)对时间t求二阶导数,将实、虚部分别展开得到加速度关系,列成矩阵形式为:

求解式(6)可以得到角加速度α2和线加速度αC。
1.1 常规解析编程方法
常规的解析方法就是直接对式(4)~(6)进行编程实现,按照图2 所示的程序流程图来求解对应的运动参数,并绘制相应的运动参数曲线图[10]。

图2 常规解析编程方法流程图
1.2 基于simulink常用模块库的编程方法
simulink仿真模块可用于机构的运动学仿真模拟,如图3 所示为其仿真步骤和流程图,其中“运动学方程”模块为描述机构各构件间加速度关系的运动方程,然后通过数值积分的算法计算机构的速度和位移[11-13]。
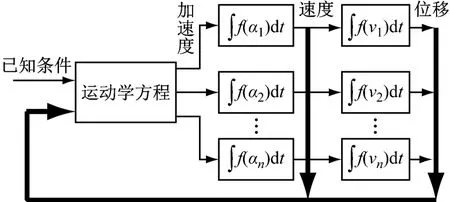
图3 基于simulink的运动仿真流程图
对于曲柄滑块机构,根据式(6)可知,输入参数为曲柄l1的加速度α1、角速度ω1和角位移θ1,连杆l2的角速度ω2和角位移θ2,输出为曲柄l1角位移θ1、连杆l2的角速度ω2和角位移θ2、滑块的速度vC和位移s。根据分析,可以构建如图4 所示的仿真分析流程图,图中的1/s为simulink中的积分模块。
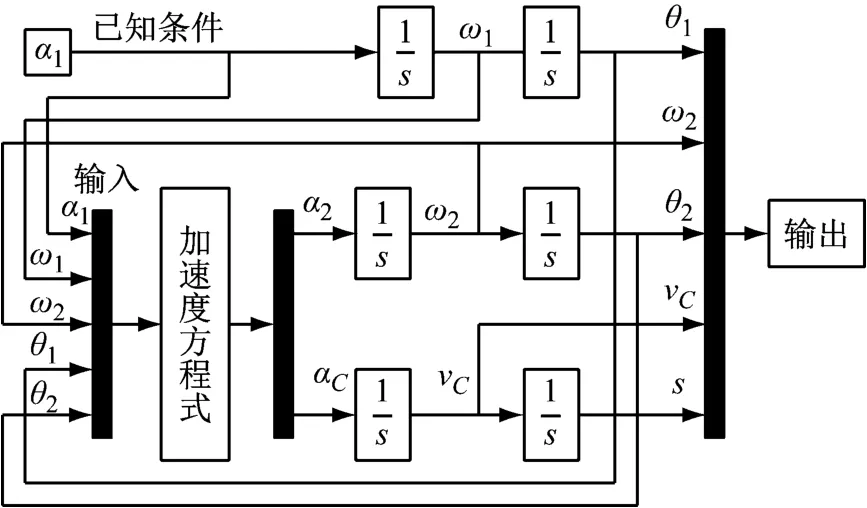
图4 曲柄滑块机构的simulink分析流程图
1.3 基于simMechanics仿真工具的方法
SimMechanics从本质上说也是属于simulink 工具箱,是Simscape 库中的一个仿真模块,提供了一系列可求解带有静力学约束、坐标变换等在内的机构系统运动学问题的工具,主要包括刚体、约束与驱动、力单元、接口单元、运动副、传感器与执行器和机械仿真等模块组等[14-15]。
结合该模块和simulink 公共模块进行机械建模,具体步骤如下:
步骤1 对需要建模的机构进行分析,明确建模时所需要的SimMechanics 模块中的功能模块,确立仿真模型的思路和方法;
步骤2建立simulink 模型窗口,根据机械系统的组成情况,将SimMechanics 中的仿真模块添加到窗口中;
步骤3根据信号的传输关系,将模块从输入端到输出端用信号线连接起来,搭建机械仿真模型框图;
步骤4设置各仿真模块的参数,设置求解器仿真参数;
步骤5设置仿真窗口的输出参数,运行仿真模拟程序,得到仿真线图(见图5)。
由图5 可见,基于simMechanics 的曲柄滑块机构运动分析框图,通过转动副和移动依次将机架→曲柄→连杆→滑块→机架连接起来构成曲柄滑块机构。在各运动副或杆件上增加传感器用于输出相应的运动参数。
2 模型的验证
对上述的3 种模型进行验证,验证的装置采用QTD-Ⅲ型组合机构实验仪,如图6 所示[16]。
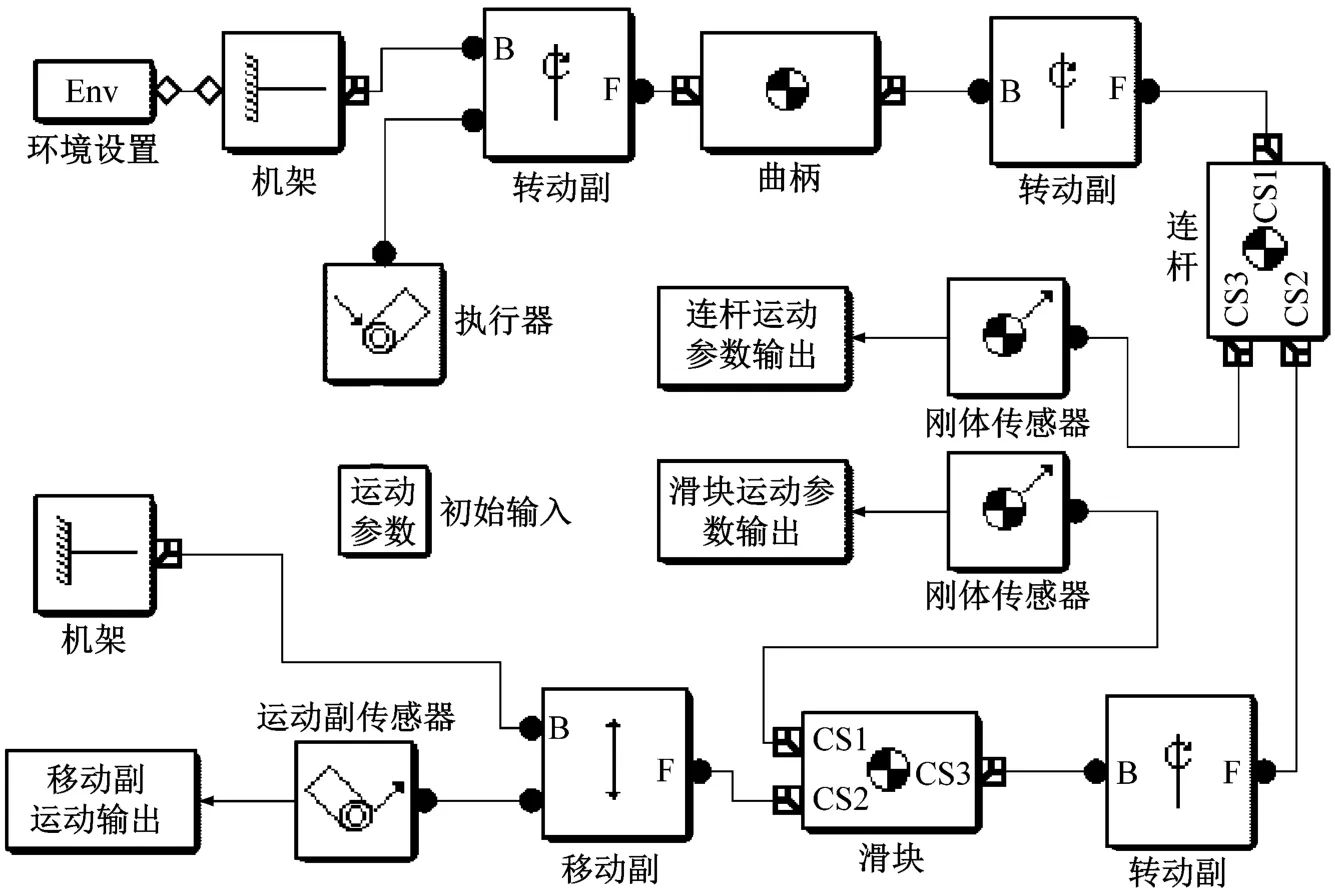
图5 基于simMechanics的曲柄滑块机构运动分析框图
图6 实验装置图形
该实验配套的为曲柄滑块机构及曲柄导杆机构,其原动力采用直流调速电动机,电机转速可在0 ~3 000 r/min 范围作无级调速,经蜗杆蜗轮减速器减速,机构的曲柄转速为0 ~100 r/min,利用往复运动的滑块推动光电脉冲编码器,输出与滑块位移相当的脉冲信号,经测试仪处理后将可得到滑块的位移、速度及加速度。如图7 所示为利用上述3 种不同建模方式得到的滑块运动输出的运动曲线和实验装置的曲线图形(只显示了滑块的位移和速度图形)。由图可见,3 种建模方式的结果相同,和实验装置的运行结果一致,表明3 种建模方法均是可行的,运行的结果也是正确的。

图7 运动曲线的比较
3 结 语
仿真分析有助于对机构的理解和掌握,在Matlab环境中有多种方式可以实现机构的运动仿真,其中常规编程方式适合于具有一定编程基础且不需要对Matlab软件深入学习的学生;simulink 积分仿真方式适于具有一定控制理论基础的学生使用;simMechanics仿真模块等方法适于机械专业中具有一定机构结构理论基础的学生,方法直观,易于理解。
猜你喜欢
设备管理与维修(2021年17期)2021-11-02
河北省科学院学报(2020年1期)2020-05-25
设备管理与维修(2019年22期)2019-12-19
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
婚姻与家庭·性情读本(2017年1期)2017-02-16
中南大学学报(自然科学版)(2016年2期)2017-01-19
铁道通信信号(2016年10期)2016-06-01
海军航空大学学报(2015年1期)2015-11-11
中国塑料(2015年9期)2015-10-14
