
基于CSS精确定位技术的胶轮车运输监控系统*
2020-07-08 06:28单成伟刘丰帧吕小强陈晓晶
煤矿机电 2020年3期
单成伟,刘丰帧,吕小强,陈晓晶
(1.天地(常州)自动化股份有限公司, 江苏 常州 213015;2.中国煤炭科工集团 常州研究院有限公司,江苏 常州 213015)
0 引言
近年来,在我国矿井辅助运输中无轨胶轮车应用越来越多,主要是这种车无轨道的限制,具有机动灵活、适应性强、安全高效、应用范围广等特点。它作为矿井运输系统的补充,承担矿井的人员、物料、设备及部分煤炭的运输任务。以神东矿区为代表的大型矿井都采用无轨胶轮车担负运送人员、物料及设备的任务。与传统轨道机车运输相比,辅助运输减员70%,效率也提高5倍以上[1]。但我国大多数矿井的辅助运输状况相对落后,其行驶巷道狭窄且交叉点多。随着生产运输任务的增加,运输车辆逐渐增多,给行车造成了很大的困难,尤其是巷道存在一定坡度的情况下,车辆之间不能相互看清,容易在区域引起堵塞。于是车辆频繁的倒车造成运输效率低下,严重时导致碰头、追尾等事故的发生。
胶轮车运输监控的核心是实时、准确地监测胶轮车位置。现有的胶轮车运输监控系统大多采用RSSI射频技术来实现胶轮车的区域定位,其车辆位置识别范围较大,当避让硐室较密集时,射频信号重叠,容易造成位置识别错误[2]。部分矿井也通过基于物理检测的方式(如检测地磁变化的机车位置传感器或检测巷道高度变化的超声波物位传感器),来获得车辆的出入列信息。但受到地压影响及井下巷道开挖预埋地磁传感器等诸多的不便,不利于系统的大面积推广。为此,本文提出了一种基于CSS技术的胶轮车运输监控系统。该系统利用SDS-TWR定位算法和定位管理协议,不需要进行时钟的同步,即可实现矿车的高定位精度,增强系统的可实现性和稳定性。
1 无线测距方法
现有的无线传感器是基于测距的定位方法,包括RSSI、TOA、TDOA和AOA等。基于RSSI的定位方法虽然满足低功率、低成本的要求,但测距误差较大;基于TOA的定位方法要求节点有精确的时间同步,但很难大规模应用于无线传感器的网络定位;TDOA定位方法受到超声波传播距离和非视距问题的限制;AOA定位方法需要额外的硬件,在成本和功耗上受到限制,而且还受外部环境的影响[3]。在地面上,传统的方法还有GPS辅助定位技术。该技术只适用于无遮挡的室外环境,在井下环境无法使用。
CSS线性调频扩频技术是一种应用于无线传感器网络定位的新型技术,其在中短距离内具有良好的定位精度和稳定性,非常适合井下、室内等无线传感器网络节点定位。CSS技术是一种时分多址的定制应用。它利用脉冲压缩使得接收脉冲能量非常集中而极易被检测出来,不但提高了抗干扰和多径效应能力,而且具有很好的鲁棒性。
2 基于CSS精确定位技术的运输监控系统具体架构
基于CSS精确定位技术的胶轮车运输监控系统由车辆标识卡、位置识别分站、车辆调度控制分站、信号灯等组成,如图1所示。

图1 基于CSS精确定位的胶轮车运输监控系统具体架构
调度控制分站是胶轮车运输监控系统的核心,每台调度控制分站具有2路独立的RS-485接口,用于挂接车辆位置识别分站和信号机。它将车辆信息、设备状态信息等通过CAN总线传输至地面主机和其他调度控制分站,并接收其他调度控制分站的信号机控制命令[4]。调度控制分站能定时巡检沿线设备获取车辆的出入列信息,通过RS-485总线控制信号机。当系统传输通道出现故障时,各RS-485回路仍能正常运行。CAN总线信号经矿用数据光端机转换为高速网络信号,又经光纤上井或直接接入矿井已有的环网交换机,实现数据信息由井下调度控制分站到系统主机的远距离传输。
地面定位服务器可通过网络获取井下设备监测、控制信息,实现井下和地面的整个网络信息的监控,实时地显示各个巷道和工作面人员及移动设备的数量、分布状况、活动轨迹,并可查询任一指定井下人员在当前或指定时刻所处的区域、坐标、活动轨迹等信息,对井下设备进行远程管理。地面定位服务器依据车辆调度控制分站获得的车辆数量、方向等信息进行决策,并直接控制信号灯,实现自动调度控制功能,也可在地面通过上位机下达控制命令到井下调度控制分站,实现信号灯的手动控制。该系统通常情况下运行于分站自动控制模式下,若井下有特殊要求时,可进行信号灯手动控制[5]。
3 车辆标识卡设计
车辆标识卡可以使用电池和外接直流电源两种供电方式。在使用外接电源时,一般采取从车辆电源箱取电的方式。为兼容特殊的应用场景和存量市场用户的使用习惯,仍保留电池供电的形式。但壳体内浇封电源及电池模块不同时工作。
定位卡的工作由MCU控制完成,它根据配置信息控制RFID射频电路进行信息的定时发送和与标识器之间距离测算。车辆标识卡发起定位数据包,可对定位的数据包和空中传输时间进行处理,计算与位置识别分站的距离,并把距离数据和一些传感控制信息组成数据包,通过无线信道发送给位置识别分站。MCU选用飞思卡尔的MKL15Z系列,运动监测功能使用振动传感器,必要时可以休眠降低本机功耗,产品原理如图2所示。

图2 车辆标识卡原理
4 试验结果分析
为验证所采取的CSS精确定位技术在井下的定位精度和传输性能,在内蒙古门克庆煤矿进行了实地测试。实地巷道的环境温度为20 ℃,湿度为35%,车辆标识卡和无线定位基站的发射功率为20 dBm(前端设计了20 dBm的功率放大电路),接收灵敏度为-95 dBm。在井下实际环境中,针对不同的地形条件、不同位置、不同的干扰因素和运动状况等进行一系列试验测试,部分测试结果见表1。由测试结果可知:
1) 巷道中停放大型车辆时,不会对定位精度造成明显的影响。
2) 巷道不同的横向位置,对定位的精度和距离没有明显的影响
3) 弯道(半圆弯道,较为平缓,总长度35 m)和T型路口支巷的定位精度基本接近平直巷道的情况。
4) 当标识卡与读卡器水平高度差太大时,信号接收距离会有所降低。基于实际定位卡的安装高度,读卡器在不高于3.5 m的情况下,尽量选择较高的位置安装。
5) 牛鼻子型转弯位置,读卡器应尽量安装在鼻尖位置,或者鼻尖的对侧,以保证接收距离覆盖3个来车的方向。
6) 在人体近距离接触并阻挡标识卡时,会对设备的天线场特性产生影响,故标识卡在安装时,应该尽量选取距离人体50 cm以上,安装位置前方视距无屏蔽遮挡的位置。
7) 有轿厢的人车、指挥车、材料车推荐安装在挡风玻璃下方位置;无封闭轿厢的工程材料车,可安装在轿厢支柱或无遮挡物的台面上;封闭式轿厢5T工程车,推荐安装在轿厢外侧的固定板上。
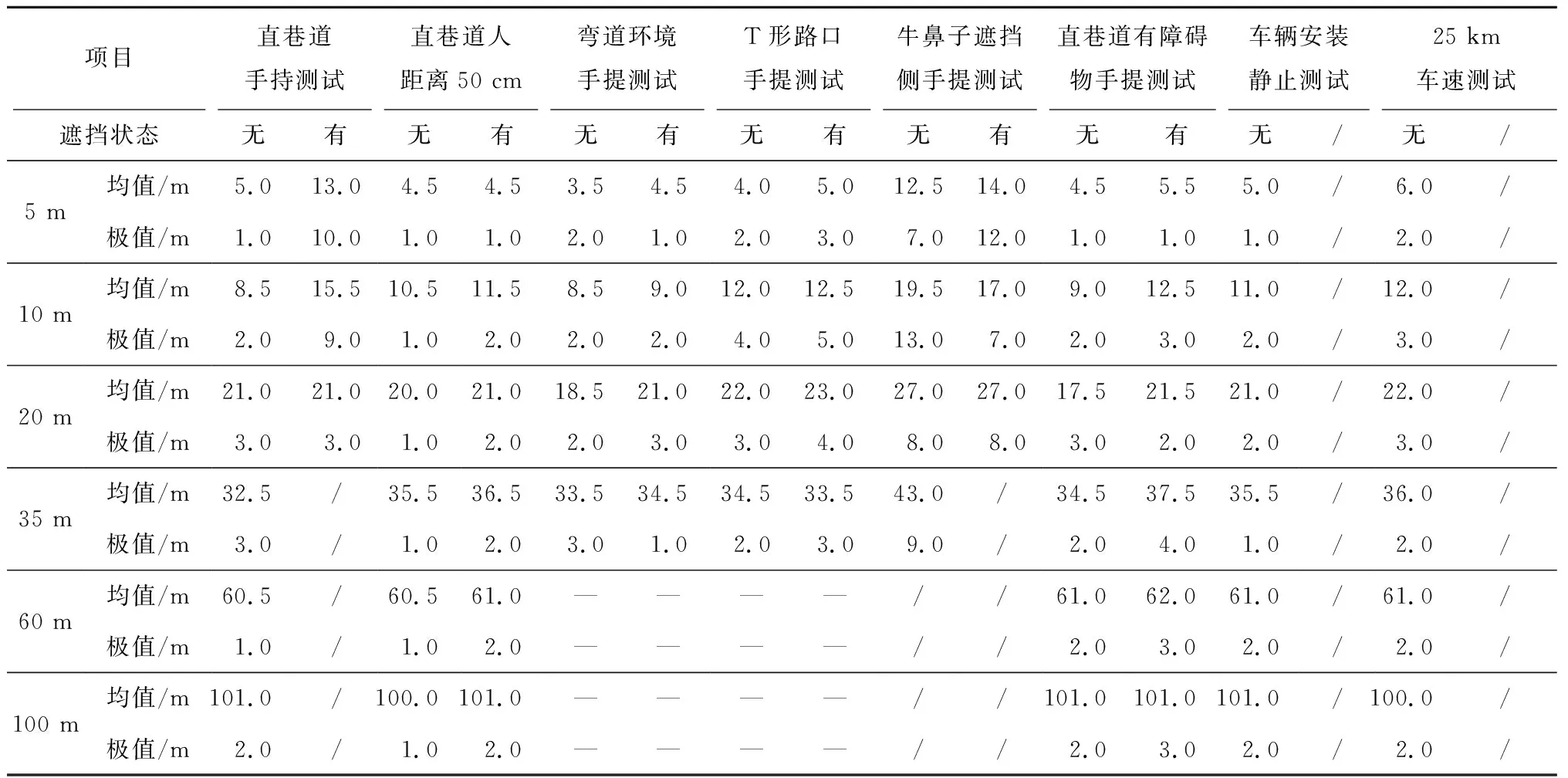
表1 试验测试数据
5 结论
经实践表明,基于CSS精确定位方式可有效地识别胶轮车位置,通过车载调节器供电,解决了原先便携式的车辆标识卡需要定期充电维护的问题,大大减轻了系统的施工工作量,为矿井胶轮车辅助运输提供了可靠的避车信号。与传统基于射频方式的胶轮车运输监控系统相比,新设计的系统性能可靠稳定,具有一定的推广价值。
猜你喜欢
世界汽车(2022年6期)2022-07-13
机械管理开发(2022年2期)2022-05-12
内燃机与配件(2022年2期)2022-01-17
青少年科技博览(中学版)(2021年9期)2021-12-21
煤矿安全(2020年7期)2020-07-27
机械管理开发(2020年4期)2020-06-10
商品与质量(2019年12期)2019-12-19
科学与财富(2017年30期)2018-01-01
语文世界(小学版)(2015年12期)2016-01-22
车迷(2015年11期)2015-08-23
