基于局部协方差矩阵判别模型的红外小目标检测方法
2020-07-07 11:09刘若阳艾斯卡尔艾木都拉
激光与红外 2020年6期
刘若阳,艾斯卡尔·艾木都拉
(新疆大学信息科学与工程学院,新疆 乌鲁木齐 830046)
1 引 言
红外小目标自动检测是目标自动识别的最重要的方面[1-2]。对于预警应用,必须在很远的距离时检测到并传入目标。由于红外传感器离感兴趣的物体相对较远,因此该物体在红外图像中只占用几个像素。感兴趣对象的红外辐射能量在很远的距离内被极大地衰减,从而导致感兴趣对象的信噪比(SNR) 通常非常低[3]。此外,目标通常被埋在复杂的背景杂波中。而且,红外图像的亮度往往受到视场辐射源变异性的影响,红外图像经常受到红外传感器噪声的干扰。因此,红外图像的质量往往很差。由于图像质量差,传统的图像描述符无法提供红外小目标检测。所以,从质量差的红外图像中进行小目标检测需要克服许多挑战。
由于小目标一般呈规则的高斯光斑,所以近年来提出了许多基于目标和背景间的差异的研究方法。文献[4]从强度和梯度的角度来描述小目标的两个局部属性以解决问题,从原始红外图像计算局部强度和梯度图,以增强目标并抑制杂波来进行小目标的检测。文献[5]提出了一种基于全方位多尺度的形态学滤波和局部特征准则的点目标检测方法。文献[6]对复杂背景下暗弱点目标和背景杂波特性进行了分析并提出了全方位多尺度的形态学滤波和局部特征准则的点目标检测方法。基于点目标的局部相关性以及目标和背景的局部差异,文献[7]提出了一种改进的基于马尔可夫随机场的点目标检测算法。文献[8]提出利用图像局部区域相似性差异图进行小目标检测。文献[9]提出了一种基于稀疏环表示(SRR)的小目标检测方法,SRR是一种有效的图形结构,它可以描述背景和目标之间的差异。文献[10]将小目标检测作为恢复低阶和稀疏矩阵的优化问题,该方法利用非局部自相似特性,有效地将结构边缘与稀疏小目标分离。文献[11]利用非局部自相似度估计红外图像的背景,用于红外小目标的检测。除上文提到的方法,还有基于图像熵的小目标检测方法,文献[12]提出了基于导数熵的对比度测量(DECM)的方法用于各种复杂背景杂波下的小目标检测。通过对图像的多尺度灰度差和自适应阈值操作对局部熵进行加权,文献[13]提出了一种基于加权图像熵的有效小目标检测方法。此外,目标检测还有许多其他算法,如基于帧差法和光流法的目标检测方法。文献[14]提出了一种新的红外目标检测模型,该模型结合了背景的自相关特征和时空域中目标的共性特征,可以检测一系列复杂背景红外图像中的目标。文献[15]提出了基于改进的帧差法和背景差法实现运动目标检测。由于无法利用单帧图像或者普通帧频的连续多帧图像对低信噪比的高速运动点目标进行有效检测,文献[16]提出了通过高时相探测对低信噪比的运动点目标进行检测的解决思路。文献[17]将光流法与边缘检测算法相结合,提出了一种基于改进光流的多特征融合运动目标检测算法。目标检测还有许多其他算法,如基于流形学习、经验模式分解和神经网络[18-19]的方法。然而,复杂背景下的小目标检测仍然是一个挑战。
本文提出了基于图像在四个方向上的变化以提高红外小目标检测结果的准确率。在红外小目标检测过程中,提出一种新的基于图像局部均值和方差的阈值公式来进行小目标与杂波的分割。
2 研究方法
因为将小目标从复杂的背景中直接分离出来是很困难的,所以本文提出了一种基于局部协方差矩阵判别模型的小目标检测的方法。
在本文中,通过计算窗口在图像上的灰度变化值来检测小目标。关键的步骤包括将原始图像转换为灰度图像,高斯平滑,计算局部极值,以及确认小目标。
在检测小目标的过程中,讨论了图像四个方向的梯度变化(x、y、yox和xoy方向)。在确定小目标的过程中使用基于图像均值和方差的新的自适应阈值公式。如图1所示,u表示目标区域,整个图像(帧)由I表示。在这种情况下,窗口v可以在I上移动。

图1 窗口示意图
为了表达方便,将图片中某个子区域的矩阵定义如下:
M(R(i,j))=[R(i,j)⊗w1R(i,j)⊗w2R(i,j)⊗w3R(i,j)⊗w4]
(1)
其中,R(i,j)是以点(i,j)为中心的一个子区域;M是它的矩阵;wk是自定义高斯核。
因此对于一个微小的移动[u,v,m,n],可以得到如下的表示:

(2)
协方差矩阵C是一个关于待检测图像的4×4的矩阵:
(3)
C还可以表示为GTG,其中G的表示如下所示:
G(i,j)=[Ix(i,j)Iy(i,j)Ixoy(i,j)Iyox(i,j)]
(4)
矩阵C的特征值是λ1,λ2,λ3,λ4,矩阵C的特征向量是u1,u2,u3,u4。
基于矩阵C的SVD分解形式,可以得到如下表达:
(5)
其中,U和V都是正交矩阵。
UTU=EVTV=E
(6)
因此可以计算出λ1,λ2,λ3,λ4和u1,u2,u3,u4的值。
本文提出了一个新的小目标分割的方法:
K={T[k(λ1,λ2)]}AND{T[k(λ3,λ4)]}
(7)
其中,k表示一个能排除非目标区域的函数;T代表一个基于图像局部均值及方差的阈值函数;AND操作是将置信图进行与操作。
为了直观地显示所提出的方法,在图2中给出了目标检测系统。图2主要描述了本文提出的小目标检测模型,第一步,输入图像并对图像进行预处理;第二步,根据所提出的算法对局部图片进行计算得到其局部协方差矩阵;第三步,使用一种新的基于图像局部均值和方差的阈值公式来进行小目标的分割;第四步,输出最终小目标检测结果。

图2 提出的小目标检测模型
图3是一张俯拍海面轮船的图片各个区域的热图。图3(a)~3(d)分别是区域1~4的热图。原图像中像素值越大,在热图上就越红,反之就越蓝,可以看出图3(a)与图3(c)包含兴趣区域,其热图呈现为高斯光斑,中间是红色,四周为蓝色;图3(b)包含平坦区域,其热图全为蓝色;图3(d)包含结构化边缘,从图中可以明显地看出平坦区域和边缘的界限。
图4是本文提出的红外小目标检测方法的流程图。

图3 各个区域热图

图4 基于本文提出的红外目标检测算法的流程图(其中圆圈包含红外小目标)
如图4所示,所有的小目标检测方法都可以分为两个主要的步骤:红外小目标增强和红外小目标分割。红外小目标增强用于突出感兴趣的红外小目标并抑制背景杂波,红外小目标分割能明确地识别感兴趣的目标。图4中的第2、4和6张图是第1、3和5张图的3D网格视图。在红外小目标增强步骤中,图4中的第1个张图是输入,置信度图是此步骤的输出。如图4的第3张图像所示,置信度图可以有效地识别小目标。但是置信图仍然包含误检情况。不过,误检情况很容易与红外小目标区分开。在小目标分割步骤中,置信度图是输入,并且可以基于自适应阈值从置信度图中分割红外小目标。如第6张图所示可以看到已经去除了误检并且在分割步骤中明确地识别了红外小目标。图5是红外小目标检测过程中的中间结果图,其中(a)列图是输入的原始图像,(b)列是(a)列图像在x与y方向的置信图,(c)列是(a)列图像在xoy与yox方向的置信图,(d)列是根据图像在x与y方向的变化检测到的红外小目标,(e)列是根据图像在xoy与yox方向的变化检测到的红外小目标,(f)列是最终的小目标检测结果。
最后,将提出的红外小目标检测方法的具体的过程总结成了算法1。
算法1:红外小目标检测算法
输入:原始红外图像。
输出:最终检测结果。
步骤①:将原始图像切分为3×3的子区域;
步骤②:按照步骤①切分出子区域分别计算每个子区域的梯度变化量矩阵;
步骤③:通过式(2)、(3)分别计算x、y、xoy和yox方向的协方差矩阵C;
步骤④:根据式(5)、(6)计算协方差矩阵C的特征向量和特征值;
步骤⑤:通过步骤④中的特征向量和特征值可以计算得到两个置信图;
步骤⑥:通过式(7)对置信图进行自适应阈值操作,将检测目标与杂波分开。
3 实验总结
本次实验环境是在8 GB 内存和3.60 GHz Intel i7处理器的计算机上,基于 C++的环境下实现的。本文提出的方法可以改善图像的SNR以提高检测精度。在实验中,每个图像的检测率(DR)和虚警率(FAs)被用作比较的标准。现在有DR=(NC/NT)×100 %和FA=NIC/N,其中NC是正确检测到的目标的数量,NT是真实目标的数量,NIC是错误检测到的目标的数量,N是序列的长度。

图5 红外小目标检测过程中的处理图(圆圈是红外小目标所在的区域)
如表1所示,该实验的数据来源包括天空、航拍地面车辆和航拍海面船舶的图像,分别在图像中检测飞机、车辆和船只。图6显示了不同k值对检测数量的影响:增加k值将降低目标检测的灵敏度并减少检测到的目标数量;降低k值将增加目标检测的灵敏度并增加检测到的目标数量。可以看出当k值取0.06时,检测效果最好。
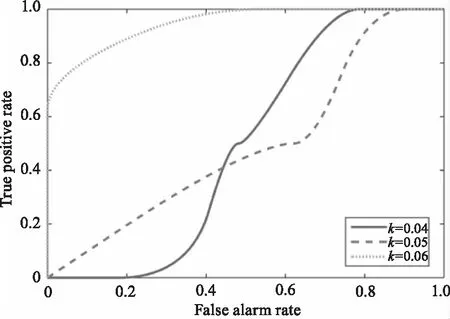
图6 不同的参数k的ROC曲线

表1 测试数据集
为了验证所提出的红外小目标检测方法的有效性,本文实现了提出的红外小目标检测方法,并与Top-Hat方法、LCM方法、ILCM方法和MPCM方法结果进行了比较。表2显示了基于航拍天空序列数据集该文检测方法与现有红外小目标检测方法的性能对比。将k值设为0.06,对本文方法进行性能评估,图7是基于航拍天空序列数据集的四种点目标检测方法的ROC曲线。通过对比,本文提出的方法检测效果最好,ILCM方法和Top-Hat方法也能达到较好的效果,LCM方法的检测性能较差。虽然不规则的云边纹理和严重的噪声对本文提出的检测算法有一定的影响,从图中可以看出本文所提出的方法相对与其他方法有较好的结果且该方法的稳定性和鲁棒性较好,可以比其他红外小目标检测方法有效地检测目标。
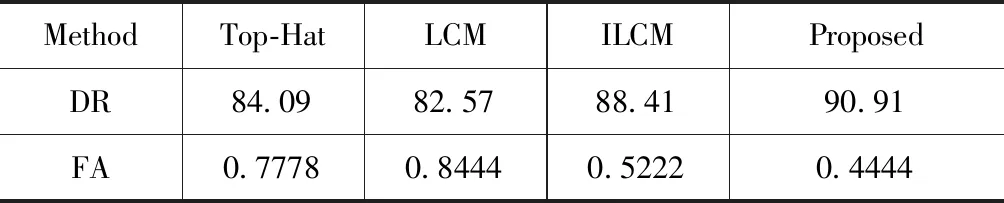
表2 该文检测方法与现有方法的对比

图7 不同的方法的ROC曲线
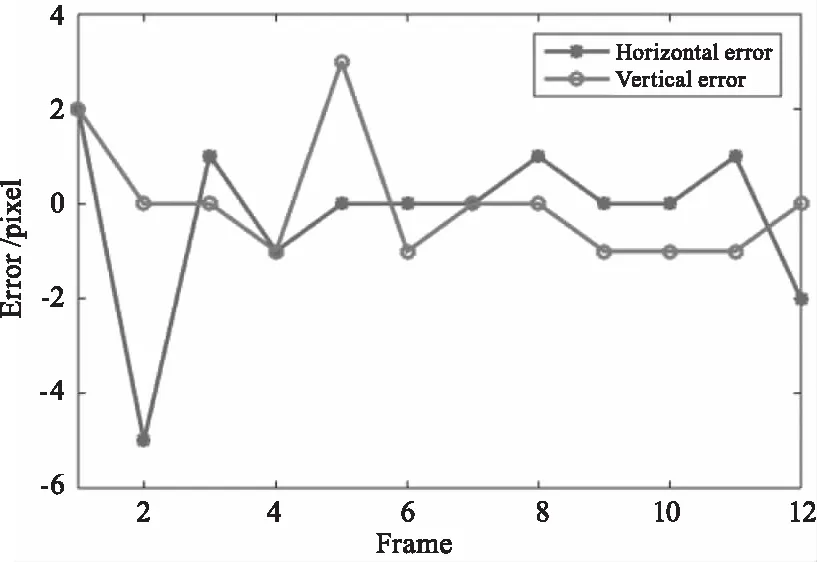
最后,图8显示了测试数据中天空序列的12帧图像的轨迹和误差曲线。

(a)使用三种不同的方法获取到的目标运动轨迹及真实目标运动轨迹
(b)Top-Hat方法的误差曲线
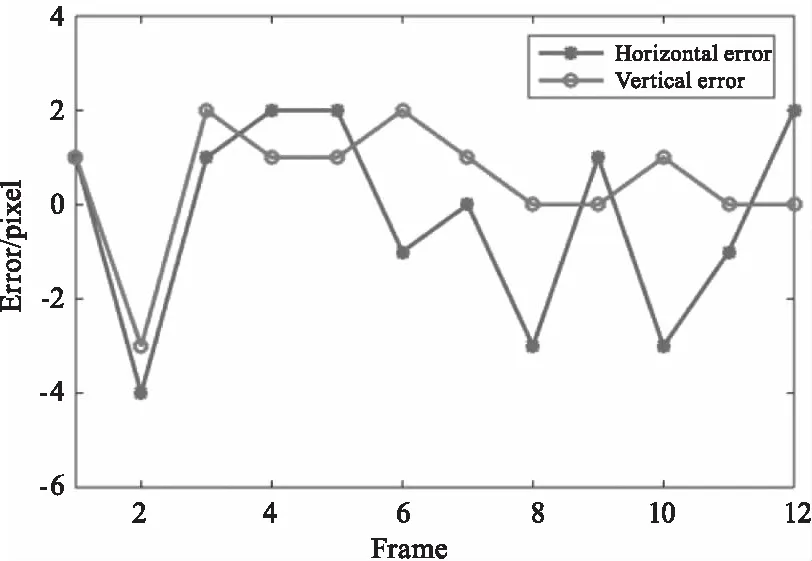
(c)ILCM方法的误差曲线
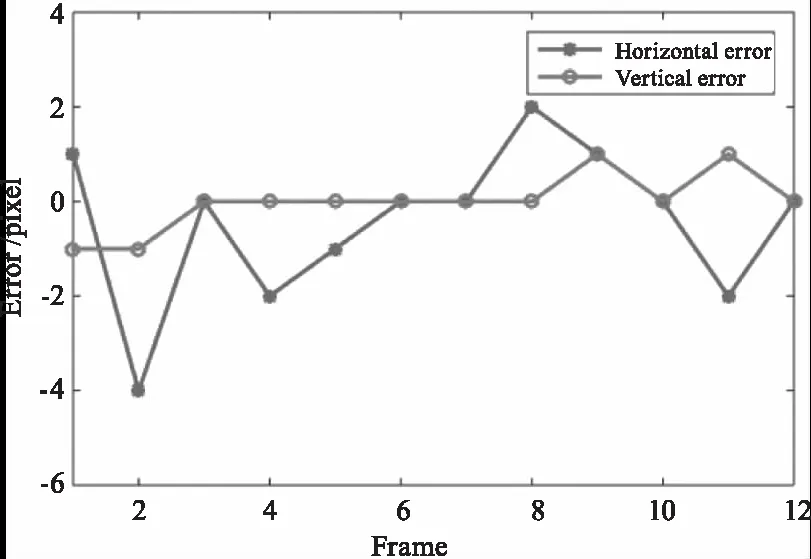
(d)本文方法的误差曲线
在图8(a)中显示出了三种检测方法的轨迹,并且所提出的方法跟踪轨迹几乎与目标的真实运动轨迹匹配。图8(b)和图8(c)分别是Top-Hat小目标检测方法和ILCM方法检测轨迹的垂直误差和水平误差。从图8(d)可以看出,通过使用所提出的方法,垂直误差小于1个像素并且水平误差小于4个像素。通常,如果地面实况和检测位置之间的距离在阈值(5个像素)内,则该检测方法是有效的。
4 总 结
本文提出了一种有效的基于局部协方差矩阵判别模型的小目标检测方法。红外小目标检测的关键思想是将原始问题分解为两个更容易的子问题,具有明确的意义。在红外小目标增强步骤中,使用基于双协方差矩阵的目标增强方法。在目标分割阶段,提出了一种基于自适应阈值的分割方法,用于从非结构化杂波和噪声中分割小目标。实验结果表明,该方法明显优于现有的一些经典红外小目标检测算法。此外,该算法既可以直接用于单帧目标检测,也可以用作实时应用的顺序目标跟踪的基础模块。
猜你喜欢
环球时报(2022-05-23)2022-05-23
中华书画家(2021年12期)2022-01-06
数学物理学报(2021年2期)2021-06-09
金桥(2021年4期)2021-05-21
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
制造技术与机床(2019年4期)2019-04-04
计算机应用与软件(2019年2期)2019-04-01
雷达学报(2017年3期)2018-01-19
发明与创新(2016年38期)2016-08-22