
基于深度学习的舰船辐射噪声多特征融合分类
2020-07-07 06:27:04倪俊帅胡长青
声学技术 2020年3期
倪俊帅,赵 梅,胡长青
(1.中国科学院声学研究所东海研究站,上海201815;2.中国科学院大学,北京100049)
0 引言
舰船辐射噪声的分类属于复杂的分类问题。由于大量采集舰船辐射噪声数据较为不易,再加上舰船航行工况的复杂性,因此舰船辐射噪声的识别是在有限样本甚至是小样本的条件下完成的。舰船辐射噪声中含有丰富的特征信息,有些信息表征着舰船不变的物理特性,有些信息则与舰船的工况或状态相关。这些时域或者频域的特征可以通过一定的手段提取出来,用于舰船的分类与识别工作。由于舰船辐射噪声的主体是宽带平稳随机信号[1],其时域特征不稳定,因此在时域特征上进行分类很难得到较高的正确率。舰船辐射噪声的频域特征相对稳定,以往的研究多采用DEMON谱分析和梅尔倒谱系数分析等方法[2-5]提取相应的频域特征,然后采用一定的分类手段进行分类。随着深度学习在语音识别和计算机视觉等领域取得的一系列成果[6-8],近年来深度学习也被广泛地应用于舰船辐射噪声的分类与识别。
国内外对舰船辐射噪声深度学习分类已有较多的相关研究,取得了一定的成果。朱可卿等[9]提取了舰船辐射噪声的频谱、梅尔倒谱系数和线谱等特征,绘制图像并用卷积神经网络和深度置信网络进行分类,得出了深度学习方法可以有效提高舰船辐射噪声分类正确率的结论。张少康等[10]提出了一种基于梅尔倒谱系数的长短时记忆网络分类方法,具备一定的智能化水下目标分类识别能力。朱成名等[11]改进了梅尔倒谱系数提取方法,在信号预处理阶段,采用正弦窗代替传统方法使用的汉明窗来进行频谱估计,获得了梅尔倒谱系数并用深度学习的方法进行分类,提高了噪声环境下分类识别的正确率。曾赛等[12]提出一种水下目标多模态深度学习的分类识别方法。针对水声信号的一维时域模态和二维频域模态特征,建立一种多模态特征融合的深度学习结构,结合了长短时记忆网络和卷积神经网络的优点,提高了分类正确率。然而,在一种特征上进行分类严重限制了深度学习的特征提取,进而限制了舰船辐射噪声分类正确率的提高;将舰船辐射噪声分类转化为图像分类有一定的误差,部分细节特征无法通过图像表现出来。
本文为了改善分类系统的性能、进一步提高舰船辐射噪声分类的正确率,提出了一种基于深度神经网络的多特征融合分类方法。文章提取了舰船辐射噪声的频谱特征、梅尔倒谱系数和功率谱特征,采用了基于误差反向传播(Back Propagation,BP)算法的具有多个输入分支的深度神经网络,同时直接对3种特征参数进行学习分类。文章在实测舰船辐射噪声数据上进行了实验,选用了两种训练集和验证集的划分方法,对比了不同信噪比下多特征融合分类方法和在一种特征上进行分类方法的正确率。
1 特征提取
1.1 梅尔倒谱系数提取
梅尔(Mel)倒谱系数提取是一种基于人耳听觉特性的特征提取方法,频率轴上按Mel频率尺度不均匀划分是梅尔倒谱系数提取的重要特点[13]。Mel频率与实际频率f的关系可用式(1)来描述:

梅尔倒谱系数计算过程的具体步骤如下:
(1) 对舰船辐射噪声信号进行分帧、预加重及汉明窗处理,再进行傅里叶变换得到其频谱。然后,设计三角形带通滤波器进行滤波。滤波器的频率特性为
带通滤波器输出为

(2) 对滤波器的输出取对数,再进行离散余弦变换,得到梅尔倒谱系数:
1.2 频谱和功率谱特征提取
频谱特征提取是最简单的频域特征提取方法,对舰船辐射噪声数据加汉明窗处理后做若干点的离散傅里叶变换即可得到其频谱。舰船辐射噪声的功率谱描述了舰船辐射噪声的信号功率在频域的分布情况,在不考虑海洋信道影响的前提下,反映了舰船的物理特性。假定舰船辐射噪声主体为平稳的各态历经的随机过程,采用周期图法对舰船辐射噪声信号做功率谱估计。为了减少噪声谱对舰船辐射噪声功率谱特征参数提取的影响,本文采用了一种类似于短时能量分析的平均功率谱特征提取方法。首先在频率轴上对功率谱进行截取。舰船辐射噪声的能量主要集中在低频部分,因此低频段对应的特征参数能够有效地反映舰船辐射噪声的基本特性。提取舰船辐射噪声的功率谱特征参数时要舍去直流分量,一般情况下,频率截取下限为5 Hz,上限为500 Hz。然后对截取的部分做加窗求和取平均值处理,即可得到舰船辐射噪声的平均功率谱[14]。假设截取部分对应的频率下限为fl,上限为fh,提取特征参数的维度为Ma,则窗宽La为

每个窗内点数为Na,平均功率谱特征参数为

2 多特征融合
2.1 深度神经网络
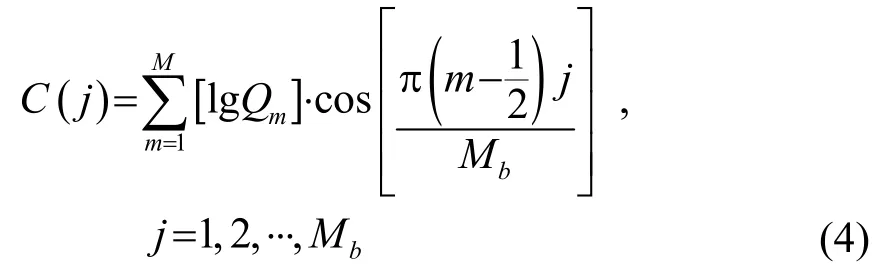
深度神经网络(Deep Neural Networks, DNN)有多个隐藏层的神经网络,其内部的神经网络层可以分为输入层、隐藏层和输出层,其结构如图1所示。
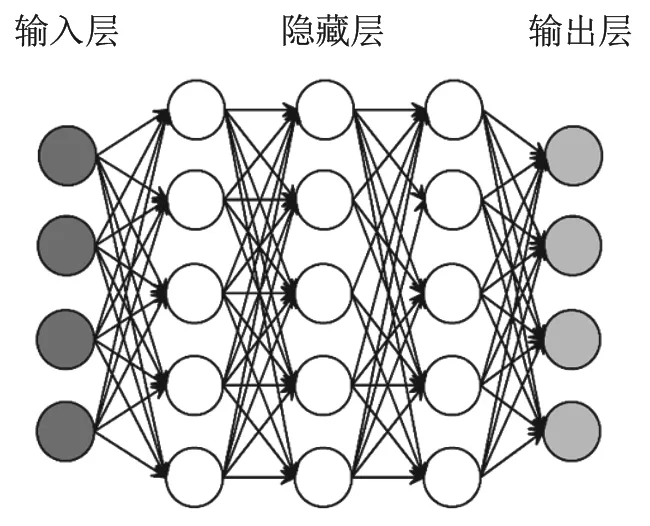
图1 深度神经网络结构图Fig.1 Structure of a deep neural network
对一个M+1层的深度神经网络,将输入层记作“层0”,将输出层记作“层M”。在0~M层中[15]:

其中,Zm为激励向量,Vm为激活向量,Wm为权重矩阵,Bm为偏差系数。V0为输入特征向量,第0层的神经元个数由V0的维度决定。
由于舰船辐射噪声分类属于多分类任务,输出层神经元个数由分类数决定,每个输出层神经元代表一类,n∈{1,⋅⋅⋅,N},其中N为类的个数。输出层采用softmax函数作为激活函数进行归一化,第n个输出神经元的值代表输入特征向量属于类n的概率PDNN(n|V0),表达式为

训练过程要最小化期望损失函数,损失函数的输入为网络预测值和真实目标值。采用交叉熵训练准则和误差反向传播(BP)算法来训练深度神经网络。如前,深度神经网络层数为M+1,假设训练样本数为Lz,分类数为N,训练过程的损失函数可表示为

2.2 特征融合网络
多特征融合可以通过具有多个输入分支的深度神经网络来实现,每一个输入分支可以用来学习一种特征。不同的输入分支通过一个连接层结合并与隐藏层和输出层相连[16]。多输入深度神经网络的结构如图2所示。
将第k个输入分支的第i层表示为,最后一层表示为。连接层记作V0,可以看作后一个深度神经网络的输入层,则

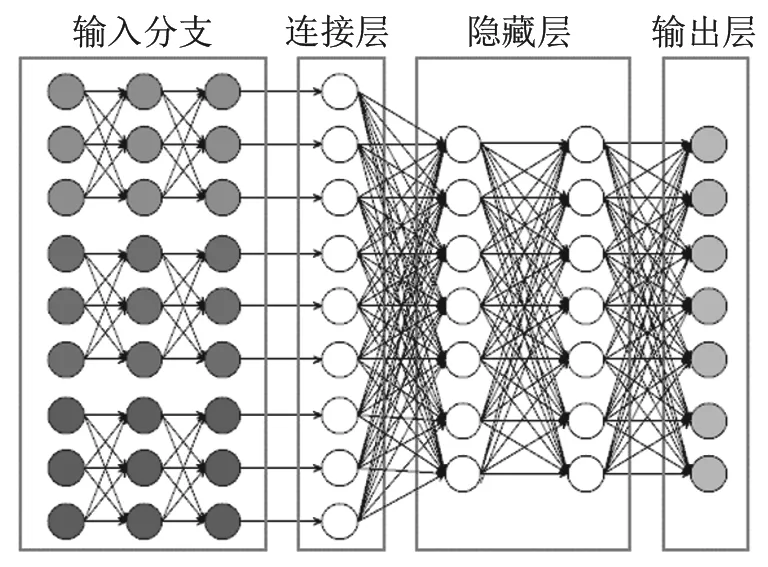
图2 多输入深度神经网络结构图Fig.2 Multi-input deep neural network structure diagram
学习过程先利用输入分支上的多个隐藏层对特征进行抽象,然后将各输入分支的底层抽象特征通过连接层进行融合,接着再对融合特征进行深度学习,最后在网络的输出层得到分类结果。相比于分别对不同的特征逐一进行学习分类,然后对所得结果做加权平均或取最大值,最终得到分类结果的方法,具有多个输入分支的深度神经网络可以同时查看所有可用的输入模态,从而联合学习更加精确的数据模型。舰船辐射噪声分类的流程如图3所示。
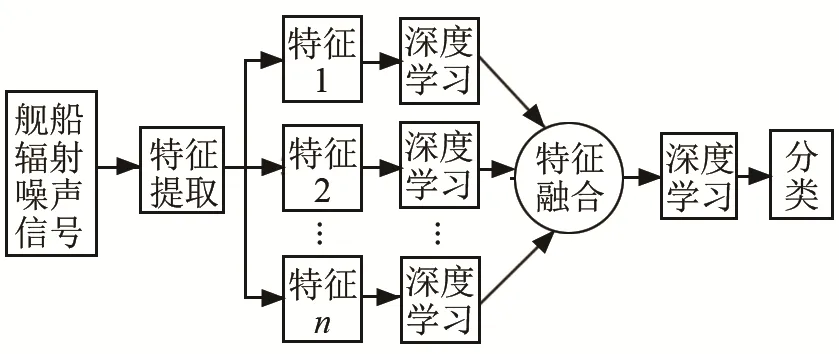
图3 舰船辐射噪声多特征分类流程Fig.3 Multi-feature classification process of ship radiated noise
3 实验结果
实测目标为12艘不同的舰船,按吨位大小可分为A、B、C、D四类,每类舰船各有3艘。获取目标舰船的辐射噪声并进行预处理共得到数据1 440段,每类目标各有360段,采样率为均32 000 Hz,每段数据长度均为1 s。根据数据所属的舰船目标种类为各段信号添加标签,A类舰船的数据标签为0,B类舰船的数据标签为1,C类舰船的数据标签为2,D类舰船的数据标签为3。
提取各段信号的梅尔倒谱系数。根据1.1节特征参数提取方法,fh=16 000 Hz,取M=160,对每段信号进行处理,归一化后去除两个低频和高频分量,可以得到包含156个梅尔倒谱系数的一维数组。提取各段信号的频谱特征。根据1.2节特征参数提取方法,对各段信号做N点的离散傅里叶变换,取N=32 000。取谱值的模并进行归一化处理,然后选取频率3~240 Hz对应的部分,从而得到包含238个频谱特征参数的一维数组。提取各段信号的功率谱特征。根据1.2节特征参数提取方法,对各段信号做功率谱估计,然后截取5~500 Hz的部分,再以2 Hz为窗宽对截取部分加窗求和处理并归一化,可以得到包含247个功率谱特征参数的一维数组。将4类舰船辐射噪声数据提取的频谱特征、梅尔倒谱系数特征和功率谱特征用图像来表示,如图4~6所示。
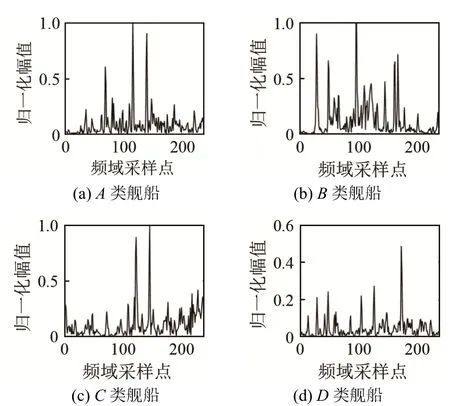
图4 4类舰船辐射噪声数据的频谱特征参数Fig.4 Spectral characteristics of radiated noise data for four types of ships

图5 4类舰船辐射噪声数据的梅尔倒谱系数Fig.5 Mel cepstrum coefficients of radiated noise data for four types of ships
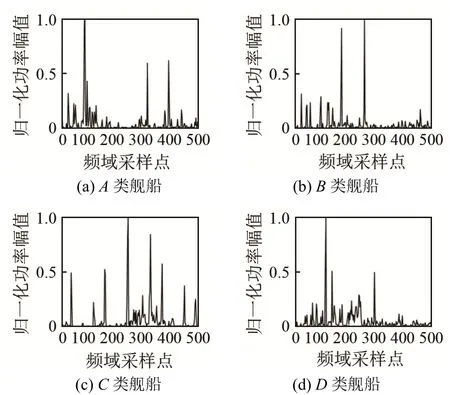
图6 4类舰船辐射噪声数据的功率谱特征参数Fig.6 Power spectral characteristics of radiated noise data for four types of ships
首先,在一种特征上进行分类。设计单输入单输出的深度神经网络,该网络有3个隐藏层,每个隐藏层有10个神经元。输入层神经元的个数为输入特征向量的维度,输出层神经元的个数为标签向量的维度。以梅尔倒谱系数特征为例,采用监督式学习,在梅尔倒谱系数特征样本集中随机抽取80%的样本作为训练集,分50个批次对网络进行训练,以剩余的样本作为验证集进行验证,网络迭代30次,正确率约为98.48%,学习和分类过程用时约3.54 s。同样选取功率谱特征样本集进行相同实验,正确率约为98.03%,学习和分类过程用时约3.57 s。选取频谱特征样本集进行相同实验,正确率约为98.14%,学习和分类过程用时约3.55 s。
然后,同时在3种特征上进行分类。设计具有3个输入分支的多输入深度神经网络,如图7所示,输入层1的神经元个数等于梅尔倒谱系数特征向量的维度,输入层2的神经元个数等于功率谱特征向量的维度,输入层3的神经元个数等于频谱特征向量的维度。3个输入分支上各有两个隐藏层,每个隐藏层有10个神经元。3个输入分支通过连接层与一个具有10个神经元的隐藏层相连接。
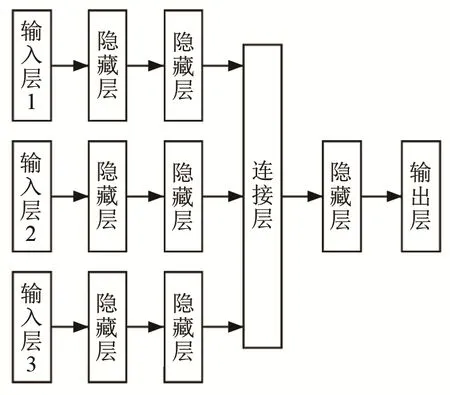
图7 多输入深度神经网络结构Fig.7 Structure of multi-input deep neural network
按对应标签合并3个不同特征的样本集,合并后的样本集样本容量为1 440。在新的样本集中随机抽取80%的样本作为训练集,分50个批次对网络进行训练,以剩余的样本作为验证集进行验证,网络迭代30次。采用监督式学习,3个输入层分别输入梅尔特征向量、功率谱特征向量和频谱特征向量,以向量化的标签作为输出。正确率约为99.85%,学习和分类过程用时约3.56 s。该过程训练精度和验证精度曲线、训练损失和验证损失曲线如图8和图9所示。
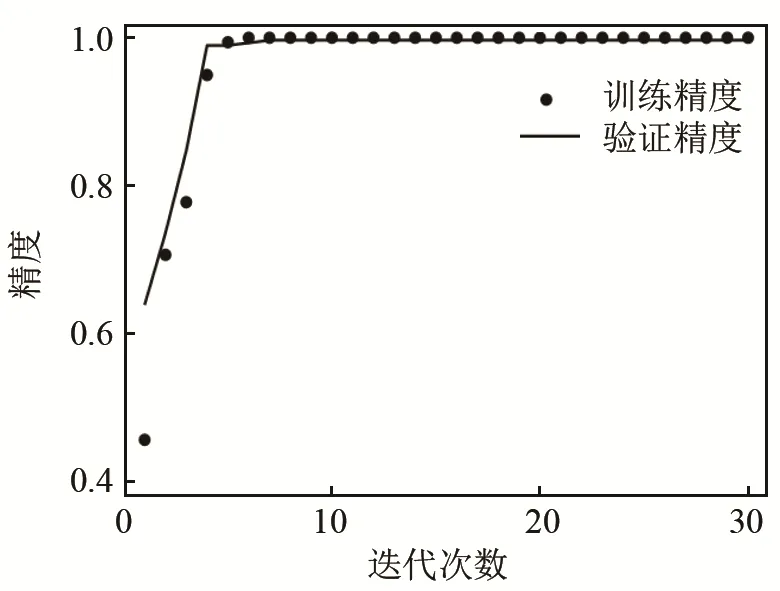
图8 训练精度和验证精度曲线Fig.8 Training accuracy and validation accuracy curve
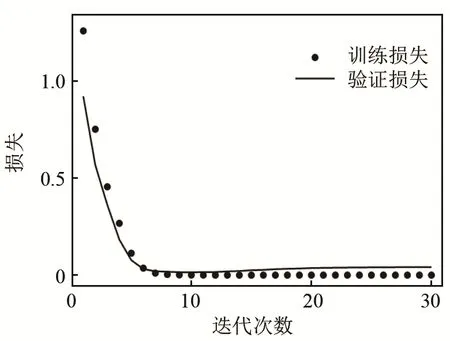
图9 训练损失和验证损失曲线Fig.9 Training loss and validation loss curves
在本实验所选用的舰船辐射噪声数据集上,采用多输入深度神经网络,同时学习3种特征再进行分类。采用此方法的分类正确率有一定的提高,比仅学习梅尔倒谱系数特征参数时的分类正确率提高了1.37%,比仅学习功率谱特征参数时的分类正确率提高了1.82%,比仅学习频谱特征参数时的分类正确率提高了1.71%。通过训练损失和验证损失曲线可知网络拟合良好,网络有效提取并学习了样本的深层特征,具有较好的稳定性。
对获取的舰船辐射噪声原始数据进行加噪声处理后再进行实验,所加噪声为随机噪声,其均值为0、方差为1。实验结果如表1所示。
由表1可见,舰船辐射噪声原始数据加噪声后再进行实验,4种分类方法的正确率均随着信噪比的降低而减小。加噪声后,本文方法的正确率依然高于在一种特征上进行分类的方法的正确率,即
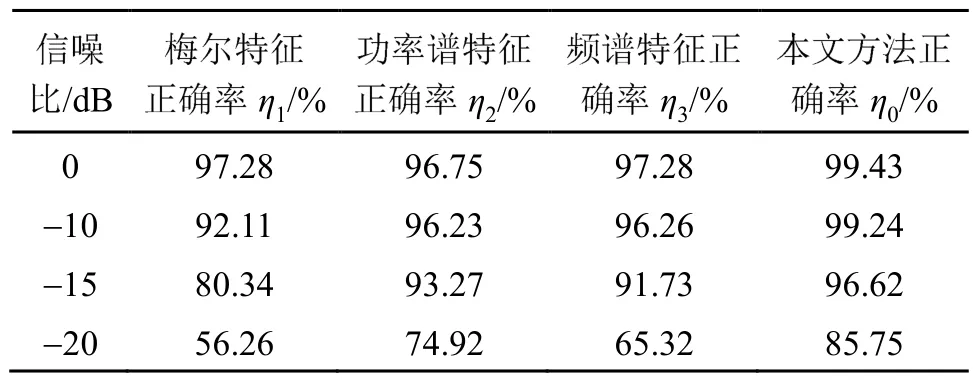
表1 不同信噪比下各分类方法的正确率Table 1 Accuracy rate of three classification methods under different signal to noise ratios

随着信噪比的降低,本文方法在分类正确率上的优势更加明显。当信噪比为0 dB时,本文方法得到的正确率较在其中一种特征上进行学习分类得到的正确率至少高出2.15%;当信噪比为-10 dB时,正确率至少高出2.98%;当信噪比为-20 dB时,正确率至少高出10.83%。此外,相比于对不同的特征逐个进行学习再对结果做融合判决的多特征分类方法,本文方法不仅能够获得较高的正确率,而且在分类性能上也有明显的提高。
在实际的分类工作中,对于同类未知舰船目标,我们可以在已知的舰船辐射噪声数据上进行训练,然后用训练好的模型对未知舰船进行分类。改变训练集和验证集进一步实验。对于四类舰船,将A类舰船记为A1、A2和A3,B类舰船记为B1、B2和B3,C类舰船记为C1、C2和C3,D类舰船记为D1、D2和D3。以A1、A2、B1、B2、C1、C2、D1和D2的样本作为训练集,用来模拟已知舰船,以A3、B3、C3和D3的样本作为验证集,用来模拟未知舰船,在不改变神经网络参数和训练方法的前提下进行实验。不加噪声时,采用梅尔倒谱系数、功率谱特征和频谱特征得到的分类正确率分别约为89.78%、85.42%和88.33%,采用多特征融合分类得到的分类正确率约为95.13%,比在一种特征下进行分类的正确率至少高出5.35%。
4 结 论
本文针对舰船辐射噪声分类问题,引入了具有多个输入分支的深度神经网络,提取了舰船辐射噪声的3种特征进行学习分类,并将分类结果与在一种特征上进行学习的分类结果做了对比。结果表明,该方法提高了正确率,是一种可行的分类方法。多种特征在并行学习过程中节省了学习和分类的时间,并且在多次实验过程中舰船辐射噪声分类的正确率结果具有较好的稳定性。同时,它还适用于采用其他特征提取方法后的舰船辐射噪声样本的分类。对于采用更多种类的特征提取方法,可以通过增加深度融合网络的输入分支数量来解决。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
哈尔滨工业大学学报(2022年5期)2022-04-19 13:26:36
中国特种设备安全(2021年5期)2021-11-06 05:09:00
装备制造技术(2021年4期)2021-08-05 07:39:54
舰船科学技术(2021年12期)2021-03-29 01:28:44
语言与文化论坛(2019年3期)2019-04-13 02:25:30
制造技术与机床(2017年11期)2017-12-18 06:46:39
舰船科学技术(2016年1期)2016-02-27 15:39:26
电测与仪表(2015年7期)2015-04-09 11:40:04
党员文摘(2014年10期)2014-10-14 23:50:35
