自动FOF邦定机上料部分中菲林、垫纸和吸塑盘检测的探讨
2020-07-07 11:23:44李春燕
机械管理开发 2020年5期
李春燕, 饶 钦, 白 杨
(中电科风华信息装备股份有限公司, 山西 太原 030024)
引言
随着科学技术不断发展,工业自动化程度越来越高,并伴随着劳务市场人力紧缺,人力劳动不可避免地被机器替代。自动FOF邦定机是根据客户要求和市场需求而研发的。FOF邦定机是一种将TCP或FPC(柔性电路板)与ITO FILM(菲林:透明的导电胶片,具有良好的导电性、透光性、红外反射性)之间建立稳定的机械和电气连接的生产设备,其主要功能为FILM自动上料、FILM定位、ACF预贴、FPC上料、预压、主压、自动下料。
1 FILM自动上料机结构
FILM自动上料机由吸塑上料传送带、吸塑盘定位台、吸塑盘-菲林料盘吸附料爪、吸塑下料传送带组成,其结构如图1所示。
FILM自动上料机工作原理:将一摞吸塑盘放在上料位置,由上料传送带运送到定位台,由定位台对吸塑盘进行定位。定位完成后,吸塑盘-菲林料盘吸附料爪到定位台位置并下降进行抓取:如果抓取的是菲林则搬送到FOF邦定机的定位台进行菲林定位;如果是垫纸则搬送到下料传送带上的吸塑盘里;如果抓取的是菲林料盘则搬送到下料传送带,由下料皮带运送到下料口。其中菲林、垫纸、透明吸塑盘三者的识别是关键。
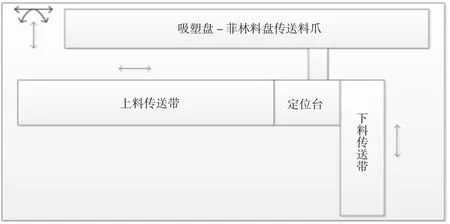
图1 菲林上料机结构图
2 FILM自动上料机中吸塑盘、垫纸与菲林的区分问题
吸塑盘主要采用优质 PVC、PET、PP、PS、GAG 等各种塑胶材料制成,其中以透明色和黑色两种居多。菲林是一种透明的导电胶片,具有良好的导电性、透光性和红外反射性。垫纸由白色纸和红色泡沫纸两种组成。
吸塑盘内,当垫纸在菲林上面时可以通过传感器检测来识别;当菲林在垫纸上面时,由于菲林具有较好的透光性,光束会透过菲林照到垫纸上,使得菲林跟垫纸无法区分;当料盘里只剩菲林跟吸塑盘时传感器无法识别。因此,考虑采用图像系统来识别。在采用图像系统识别的过程中,不算特殊来料,基本上通过图像系统即可识别菲林,但到最后吸塑盘中只剩垫纸时,因吸塑盘和垫纸都没有特殊的靶标,图像系统则无法识别料盘与垫纸。
3 FILM自动上料机中吸塑盘、垫纸与菲林的区分方法
3.1 垫纸和菲林的区分
垫纸可以通过光纤传感器检测到。光纤传感器的基本工作原理是将来自光源的光经过光纤送入调制器,使待测物体与进入调制区的光相互作用后,导致光的光学性质(如光的强度、波长、频率、相位、偏振态等)发生变化,发生变化后的光称为被调制的信号光,再利用被测量物体对光的传输特性施加的影响,完成测量[1]。垫纸的识别是通过识别光纤的光相位、光强变化来完成的,因此光纤传感器对垫纸直接检测较易实现。当菲林在垫纸上时,光束透过菲林照射到垫纸上再通过光纤反馈回调制器时,光强变化不大,使得菲林跟垫纸不易区分。
因传感器不容易区分菲林和垫纸,因此考虑采用图像识别。
图像识别是以图像的主要特征为识别依据来完成的,如三角形、圆形、十字形等特征,因此人们提出了不同的图像识别模型,例如模板匹配模型、原型匹配模型。本次菲林图像识别采用了模板匹配识别。模板就是一副已知的小图像,而模板匹配就是在一副大图像中搜寻目标,已知该图中有要找的目标且该目标同模板有相同的尺寸、方向和图像元素,通过一定的算法可以在图中找到目标,确定其坐标位置,这个图像也就被识别了[2]。菲林上有两个十字靶标,图像系统通过识别这两个十字靶标来识别菲林。在通常情况下,菲林被放在菲林料盘中间,通过识别十字靶标能被区分。当菲林在吸塑盘中间与在吸塑盘边缘挨着料盘时靶标对比如图2所示,吸塑边缘在光源的照射下投影到菲林靶标上,使得图像系统采集到靶标有重影,无法识别到靶标。在不考虑特殊来料的情况下,图像系统可以识别菲林。
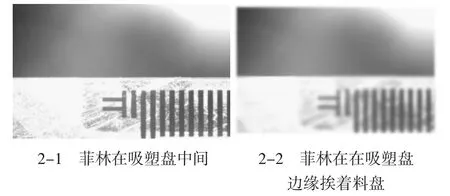
图2 菲林在吸塑盘中间与在吸塑盘边缘挨着料盘时靶标对比图
因图像系统区分不开吸塑盘和垫纸,因此考虑采用扩散反射型光电传感器识别吸塑料盘。
光电传感器是以光电效应为基础,把被测量物体的变化转换成光信号的变化,然后借助光电元件进一步将光信号转换成电信号。光电效应是指用光照射某一物体,可理解为一连串带有一定能量的光子轰击在这个物体上,此时光子能量传递给电子,并且是一个光子的全部能量一次性地被一个电子所吸收,电子得到光子传递的能量后其状态就会发生变化,从而使受光照射的物体产生相应的电效应[3]。在扩散反射型光电传感器的检测头里也装有一个发光器和一个收光器。在检测时,当检测吸塑盘时挡住了光,并把部分光反射回来,收光器收到光信号,输出一个开关信号给控制系统,吸塑盘被识别。因垫纸和吸塑盘都会被检测到,因此我们通过检测吸塑盘边缘识别吸塑盘。通过上述实验可以得出,传感器识别或图像识别只对菲林、垫纸、料盘进行直接检测是可行的,因此考虑将菲林、垫纸、料盘抓取后再进行检测区分,而不是将它们叠成一摞进行区分。
3.2 吸塑盘、垫纸与菲林的区分
根据上面实验得出,在定位台上只使用传感器识别或图像系统识别不能直接将吸塑盘、菲林、垫纸区分开,因此考虑采用图像系统识别菲林和垫纸、采用光电传感器识别菲林和吸塑盘。在图像系统识别菲林实验的过程中发现菲林在吸塑盘边缘紧挨料盘造成来料较多,误识别也较多。为了解决这个问题,采取将原来图像系统在定位台位置先区分是菲林还是垫纸的方式改为料爪先抓取来料再通过图像系统识别,经过实验验证出现特殊来料也能识别,不会出现误检,说明上述方法可行。因此,采用图像系统检测区分是菲林还是垫纸,由光电传感器检测识别料盘可以解决菲林、垫纸、吸塑盘区分不开的问题。
4 FILM自动上料机中吸塑盘、垫纸与菲林的区分方法的确定
采用光纤传感器在定位台识别菲林跟垫纸时,因菲林透光性较好,菲林在吸塑盘里最上面一层时,光纤传感器会透过菲林检测到垫纸,导致菲林、垫纸区分不开。现在我们对料爪抓起来料后通过光纤传感器对菲林和垫纸的区分进行检测实验,实验证明料爪抓起来料后,垫纸被识别,检测菲林是光纤传感器无变化,光纤传感器检测光束不会透过菲林检测到下面的垫纸。因此料爪抓起来料后传感器检测有信号时是垫纸,检测无信号时是菲林,光纤传感器也能很好地将菲林、垫纸区分开来。
通过图像系统加光电传感器可以区分开菲林、垫纸、吸塑盘;通过光纤传感器加光电传感器也可以区分开菲林、垫纸、吸塑盘;考虑到成本问题,最终采用光纤传感器加光电传感器区分菲林、垫纸、吸塑盘。
5 结论
1)通过采用图像系统、传感器对FLIM上料机中菲林、垫纸、吸塑盘识别进行实验,最终得出结论:在定位台上通过图像系统、传感器不能将菲林、垫纸、吸塑盘区分开;在料爪将来料抓取后不论图像系统还是传感器都可以将菲林、垫纸、吸塑盘区分开。
2)因客户没有提出必须采用图像系统进行检测的要求,加之通过传感器也能很好地实现这个功能,最终决定采用传感器进行检测。
猜你喜欢
小学生学习指导(低年级)(2023年10期)2023-10-28 06:34:42
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:06
军民两用技术与产品(2021年10期)2021-03-16 06:05:10
世界农药(2019年3期)2019-09-10 07:04:10
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:28
光学精密工程(2016年4期)2016-11-07 09:04:48
肿瘤影像学(2015年3期)2015-12-09 02:38:45
中国检察官(2015年12期)2015-02-27 15:39:33
上海制造(2013年10期)2014-03-31 03:26:40
印制电路信息(2011年11期)2011-07-31 06:13:40