
基于PLC和触摸屏控制的教学用气动机械手研制
2020-07-07 06:25金兴伟
湖北工业职业技术学院学报 2020年2期
金兴伟,王 典
(湖北工业职业技术学院 机电工程学院,湖北 十堰 442000)
机械手是能模仿人手臂的某些动作功能,按固定程序抓取、搬运物件或操作工具的自动化装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、食品加工等行业。气动机械手以压缩空气为媒介,是集机械结构、气动系统与控制系统于一体的典型的机电一体化产品,它具有结构简单、拆装方便、易于控制与操作、价格低等特点,非常适合用于教学。因此,设计制作该气动机械手可作为液压与气动、PLC编程控制与调试等课程实习实训教学设备,用以更好地培养学生专业综合应用能力和创新能力[1-3]。
1 机械手结构设计
气动机械手的结构如图1所示,具有竖直方向移动、水平方向移动和转动3个自由度以及1个手指运动,主要由4个部件组成:旋转气缸、伸缩气缸、升降气缸和气动手指。气动手指夹紧、松开可实现工件的抓取和放置。气动手指通过连接块与竖直方向的升降气缸连接,升降气缸实现竖直方向的上升和下降运动,该气缸在竖直方向的行程可通过其顶部的调节螺母进行调节改变。升降气缸通过连接块与伸缩气缸(也称悬臂缸)连接,伸缩气缸可实现水平方向的伸缩运动。为了能承受较大载荷和力矩,提高导向精度,该伸缩气缸采用双轴气缸。伸缩气缸安装在旋转气缸的转台上,旋转气缸可带动整个机械手实现0°~190°范围的回转,回转角度可通过调节螺母进行调节。整个机械手可根据需要安装在相应的工作台上。

1-气动手指 2-升降气缸 3-连接块 4-伸缩气缸 5-旋转气缸 6-调节螺母
图1 气动机械手结构图
2 机械手气动系统设计
气动机械手的气动回路图如图2所示。
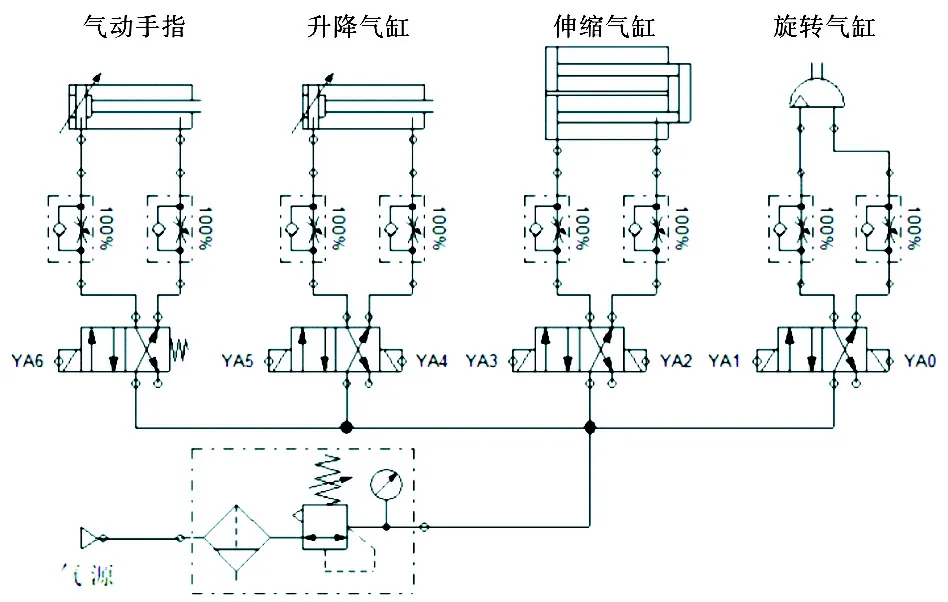
图2 气动系统原理图
该气动系统结构简单,便于学生实验时组装与拆卸。换向阀均采用24V直流电磁换向阀,避免强电,保证学生在实验过程中的安全。所有气缸元件的活塞上都应该带有磁环,以便气缸外的磁性开关检测活塞是否运动到位,判断机械手运行状态,为后续动作提供执行条件。各气路中均配置了节流阀,可以根据实际需要调节各气缸的运行速度。
3 气动机械手控制系统
该气动机械手设计的初衷是为教学服务,应用于课程,贴近于实际,因此,控制系统采用PLC作为主控制器,配合当前工厂实际应用广泛的触摸屏作为上位机,与PLC通讯并对其控制和状态监测。学生可以通过该设备学习PLC编程控制与调试以及触摸屏组态。
3.1 PLC控制系统设计
3.1.1 控制要求
(1)能通过转换开关对机械手进行手动和自动运行切换;
(2)手动运行时,可根据需要控制机械手任意气缸动作,也可手动复位机械手;
(3)自动运行时,按下启动按钮,机械手按如下流程自动运行:原位(手指松开、悬臂缩回、手臂上升)→悬臂伸出→手臂下降→手指夹紧(抓取工件)→手臂上升→悬臂缩回→左转→悬臂伸出→手臂下降→手指松开(放下工件)→手臂上升→悬臂缩回→右转,完成一个周期动作。之后进行下一工件的搬运,依次循环。按下停止按钮,机械手完成当前工序后才停止。
(4)按下急停按钮,机械手立即停止运行。
3.1.2 PLC I/O地址分配及硬件接线
根据系统控制要求分析,所需的输入/输出(I/O)信号如表1所示。
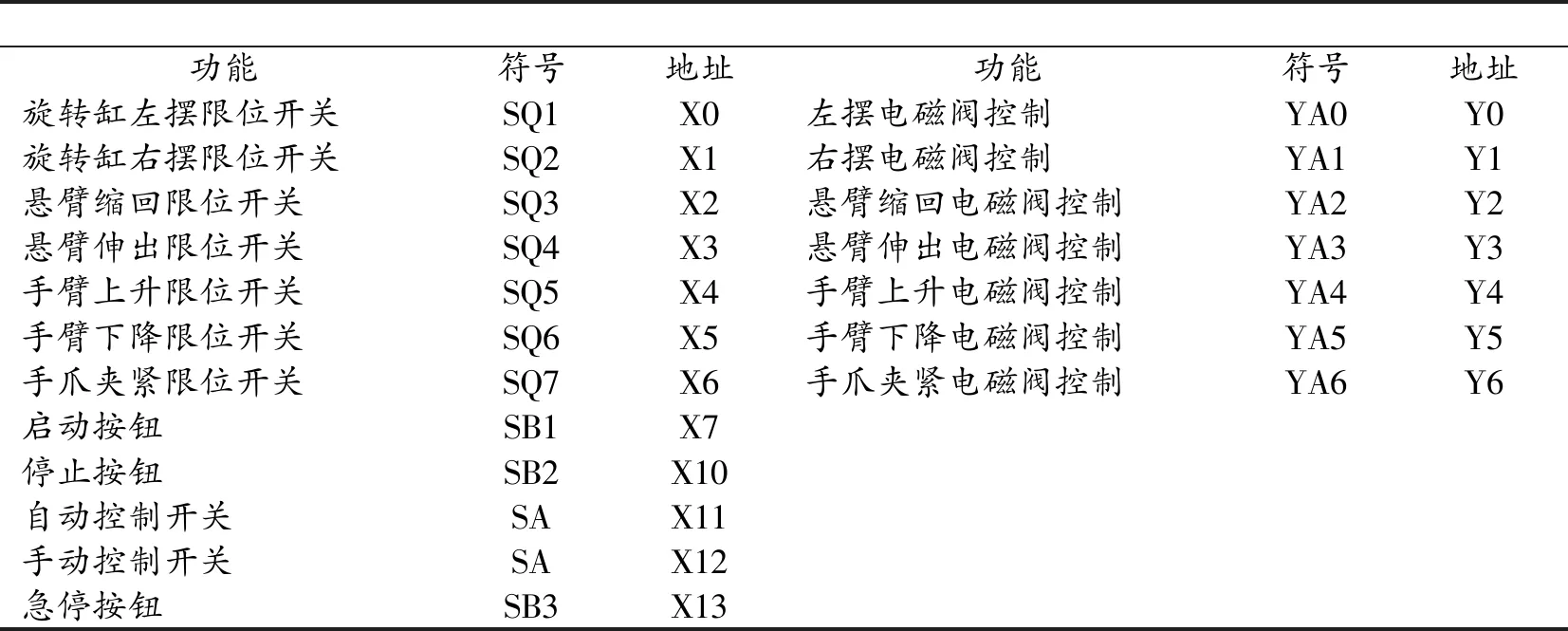
表1 气动机械手控制系统I/O分配表
根据系统输入/输出特性及负载情况,PLC选用三菱FX-1N24MR,硬件接线图如图3所示。
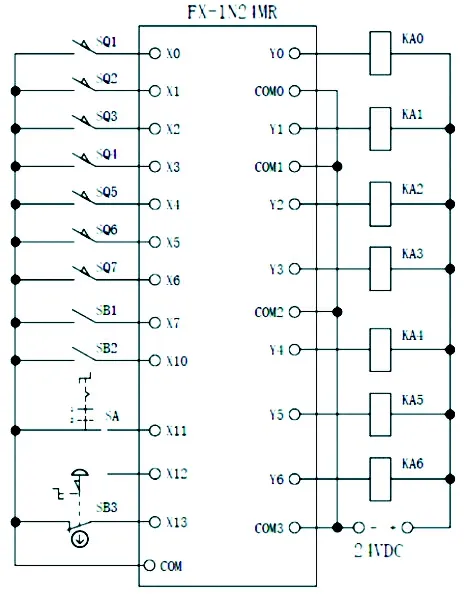
图3 控制系统PLC硬件接线图
3.1.3 程序设计
根据控制要求分析可知,机械手按一定动作顺序执行,程序采用SFC顺序功能图[4-5]编写,应用选择性分支能方便实现手动运行和自动运行切换。转换开关SA使X12=1时为手动运行,自动程序分支不会执行;当X11=1时为自动运行,相应的手动程序分支不会执行。具体控制程序顺序功能如图4所示。

图4 控制程序顺序功能图
3.2 触摸屏组态设计[6]
系统选用MCGS的TPC7062TX触摸屏作为组态监控设备,MCGS与PLC之间变量连接如表2所示,控制界面如图5所示。控制界面由工作状态、自动控制、手动控制三部分组成。工作状态可以显示机械手当前运行模式;自动控制只需要启动、停止;手动控制可以对任意气缸进行控制,同时还可以进行机械手复位操作。

表2 MCGS与PLC变量连接表

图5 触摸屏控制界面
3.3 气动机械手制作与调试
根据设计的机械结构、气动系统和控制系统,进行元件采购和制作,组装调试后的气动机械手如图6所示。

图6 组装调试完成的气动机械手实物图
4 结语
该气动机械手将机械、气压传动、PLC控制技术、传感器检测技术、触摸屏技术有机整合在一起,可以很好地满足各项单类技能和综合技能的训练要求,适合进行实习实训教学和锻炼学生的动手能力、创新能力。学生可以利用该设备从机械组装、气控回路设计与组装、电气设计与安装、触摸屏设计、PLC 编程与调试等方面进行工程训练。经实际教学应用证明,该气动机械手实用性强,能有效提高学生学习兴趣,对实习实训教学起到了重要的促进作用。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26
中国特种设备安全(2019年3期)2019-04-22
摄影之友(影像视觉)(2017年11期)2017-11-27
小学生导刊(2017年17期)2017-05-17
山东工业技术(2016年15期)2016-12-01
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
通信电源技术(2016年1期)2016-04-16
设备管理与维修(2016年6期)2016-03-16
