PWM整流器控制系统实践教学平台的开发
2020-07-06 07:05姚绪梁王景芳
实验室研究与探索 2020年4期
姚绪梁,马 赫,王景芳
(哈尔滨工程大学自动化学院,哈尔滨150001)
0 引 言
电力电子技术是高校电气工程相关专业学生的专业必修课,这门课程不仅介绍了常用的电力电子器件,而且重点讲解了几种常见的电力电子变换电路[1-4]。在这门课的学习过程中,主要目的是让学生掌握不同电路的工作原理,让学生拥有扎实的理论基础。其次是培养学生的动手能力和实验技能,通过分析实验现象验证所学知识。为此,许多高校为满足教学要求,开始研制相关的实验设备[5-10]。
近年来,随着电力电子器件的快速发展,整流器已广泛应用于各个领域。三相电压型PWM整流器具有四象限工作、单位功率因数运行、网侧电流谐波产生少、直流电压可控的优点[11-15]。为了提高学生对整流技术基础知识的认知,并且培养他们的实验技能和创新思维,开发了三相电压型PWM整流器控制系统实践教学平台。
该平台既能进行不控整流,使学生与课上所学的整流部分知识进行对比印证。也能通过闭环控制算法,如电压、电流双闭环控制,直接功率控制或预测控制,使直流输出电压稳定在给定值。交流输入电压在一定电压范围内变动时,直流侧输出电压可以维持不变,并且在负载突变后具有快速调节能力。学生也可以在现有的闭环控制算法上进行改进,改善系统的动态性能和稳态性能,培养其程序编写能力。另外,该平台设置很多信号输出端,可以通过示波器直接观察交流电压/电流、直流电压/电流和PWM脉冲信号等波形,便于其分析实验现象。
1 总体方案设计
该实践教学平台的设计思路如下:硬件电路具有可调节性与高兼容性,软件程序实现模块化。可调节性是指电路自身可以根据实际需求灵活地更改电路参数,例如采样电路可以依据电压和电流的采样范围不同,改变电压或电流放大倍数,使采样后的数据更加精确;或者是根据需求选择不同的滤波参数。高兼容性意味着该平台可以按需求选用不同型号的器件,更换器件电路仍能正常工作,可以锻炼学生的自主设计能力。另外,相同功能的电路可以通用,例如直流与交流电压采样的电路是通用的。软件程序实现不同功能的模块独立编写,如ADC模块、定时器模块、DAC输出模块和中断处理模块等,这样学生能够清楚地理解每一模块的功能,同时也便于其编程。
基于以上设计思想,所开发的三相电压型PWM整流器控制系统实践教学平台主要由整流电路、驱动电路、控制电路、采样电路和上位机组成,如图1所示。上位机可以对整流器控制系统的控制策略、PI参数和输出电压进行更改;采样电路采样直流与交流的电压、电流;控制电路获取电压电流信号,并通过控制算法产生6路PWM脉冲控制整流桥开关管导通与关断;整流电路将输入的三相交流电压变换为直流电压。
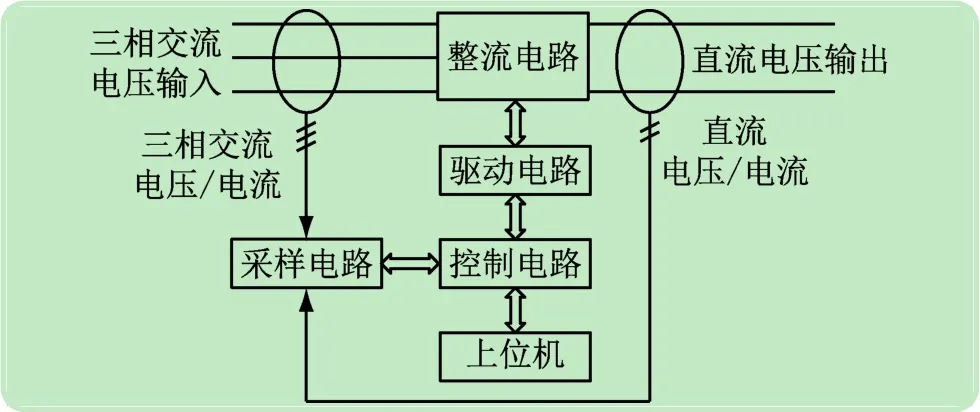
图1 总体结构框图
2 三相电压型PWM整流器控制系统设计
2.1 主电路设计
主电路如图2所示,输入三相电压经TSGC2型调压器输出至整流器交流侧,20~100 V可调。
三相电压型PWM整流器的核心电力电子器件为集成功率器件(简称IPM),型号为PM50RL1A060。其额定电流为50 A,耐压600 V。内部集成了三相共6个全控型开关器件及反并联二极管,能够在欠压、过流以及温度过高时发出故障信号。简化了驱动电路的设计,同时大大提高了系统的可靠性。IPM的集成度非常高,其体积相比于IGBT小很多,也减小了主电路的空间占用,达到小型化的目的。
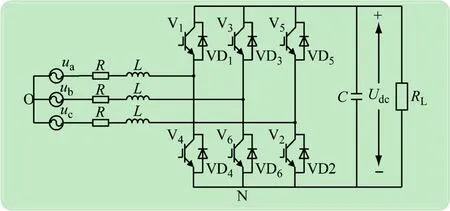
图2 三相电压型PWM整流器主电路
2.2 控制电路设计
控制电路是整个控制系统的核心。处理器必须具备多路高精度和高速的A/D与I/O接口,拥有快速处理数据的能力[16],因此选择了ST公司的STM32103ZET6作为处理器。该芯片是32位的ARM微控制器,其内部使用高速存储器,而且自带Flash,不需要外接ROM,简化了设计。且具有32位高性能RISC内核,丰富的增强型I/O端口,有两条APB总线,工作频率为72 MHz。控制电路的输入为采样的电压、电流信号和故障反馈信号。处理器根据采样得到的电压和电流信号,通过编写的控制算法产生6路PWM脉冲驱动IPM内部开关管进行整流。控制电路一旦检测到驱动电路产生的故障信号,立即封锁PWM脉冲输出,保护整个电路。
2.3 采样电路设计
采样电路由电压采样电路和电流采样电路构成。电压采样电路采用LEM公司型号为LV25-P的电压传感器,由于其采用电流互感原理,输入输出均为电流信号,故测量电压时需要串联功率电阻将其变为小电流,输出的电流信号再经电阻将其变为电压信号,电阻根据电压的测量范围不同分别取值。但是输出的电压信号不能直接发送至STM32芯片的ADC模块,需要进行如图3所示的信号调理。
首先经过截止频率为16 kHz的RC低通滤波电路去除高频干扰。之后由4通道运算放大芯片OPA4277搭建运放电路进行处理。第1级和第4级运放为电压跟随器,其具有高输入阻抗、低输出阻抗,能够提高带载能力;第2级运放和电位器构成电压抬升电路,由于交流电压信号在0 V上下波动,而STM32的输入电压范围为0~3.3 V,故将其最小值抬升到0 V以上;第3级运放和电位器构成电压放大电路,可以放大电压范围以提高采样精度;第4级电压跟随器输出滤波后利用BAV99将输入到STM32的电压限制在3.3 V以内。电流传感器的型号采用TOKEN公司的TBC25ES565,其输出为电压信号,故不需要升压电阻。但仍然需要经过与电压采样电路相同的信号调理电路,之后输出至STM32芯片的ADC模块。
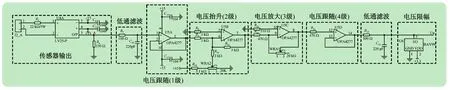
图3 信号调理电路
2.4 驱动电路设计
STM32控制芯片发出的PWM脉冲高电平为3.3 V,但是IPM驱动电压为15 V。控制电路无法直接驱动IPM,而且与主电路之间需要电气隔离,因此需要在主电路和控制电路之间设置一个驱动电路实现电气隔离与功率放大。驱动电路采用光耦隔离芯片4506,并且每一路驱动独立供电,防止驱动故障烧毁控制电路。
另外,驱动电路不仅要实现电气隔离和功率放大,还要避免程序出错或其他故障导致的IPM上下桥臂直通,导致IPM过流烧毁。因此需要具备PWM输出互锁功能。由于IPM的驱动信号是高电平截止,低电平导通,所以需要低电平互锁。假设EPWM1A和EPWM1B是同一桥臂的上桥臂导通信号和下桥臂导通信号。PWM1A和PWM1B是真正输出至IPM模块的驱动信号。当EPWM1A和EPWM1B信号同时为“0”时,对应的PWM1A和PWM1B信号应同时为“1”;其他情况时PWM1A和PWM1B信号分别与EPWM1A和EPWM1B信号一致。这样才可以有效防止IPM上下桥臂直通。设计的互锁保护电路逻辑如图4所示。
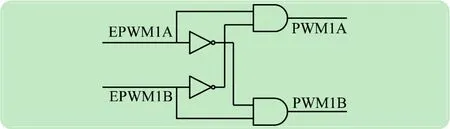
图4 PWM互锁电路逻辑
3 控制软件设计
三相电压型PWM整流器控制程序由主程序和中断子程序构成。程序流程如图5所示。
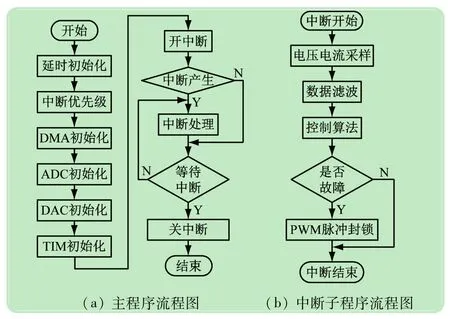
图5 程序流程图
3.1 主程序
主程序流程图如图5(a)所示,由初始化程序和中断处理程序构成。延时初始化程序配置系统的时钟、设置延时时间;中断优先级设置各个中断的顺序,高优先级的中断可以打断低优先级的中断,用于设置系统保护功能;DMA初始化和ADC初始化用于配置ADC模块I/O口的采样通道、采样顺序和采样频率等,使用DMA功能可以将ADC采样数据直接传送至内存,减轻处理器的负担;DAC初始化使能DAC功能,用于输出波形;TIM初始化配置STM32的定时器,用于产生6路互补的PWM脉冲和定时器中断等。中断处理程序等待中断的产生,执行中断子程序。
3.2 中断子程序
中断子程序是程序的核心部分,控制算法就是在中断中执行的,流程图如图5(b)所示。中断子程的功能如下:电压电流采样、数据滤波、控制算法、故障检测和PWM脉冲封锁。电压电流采样程序将ADC采样得到的网侧交流电压和电流、直流电压和电流的数字量,转换为实际的电压电流数据;数据滤波程序对电压和电流采样数据进行处理,保证数据的准确性;控制算法程序通过编写的控制算法实现闭环控制。PWM整流器控制系统的目的是保持输出直流电压恒定、网侧电流正弦化、四象限运行。其控制算法一般采用电压、电流双闭环控制策略,也可以采用直接功率控制策略或者预测控制策略等。
为了使系统能够连续安全运行,还需设置故障保护程序。当检测到IPM产生的欠压、过流和温度过高等故障信号,程序立即封锁PWM脉冲信号,使其全都置为高电平,关断IPM内部开关管,保护主电路。
4 实验验证
根据上述设计方案,搭建PWM整流器控制系统的硬件电路,编写软件程序。开发出的PWM整流器实践教学平台的实物如图6所示。
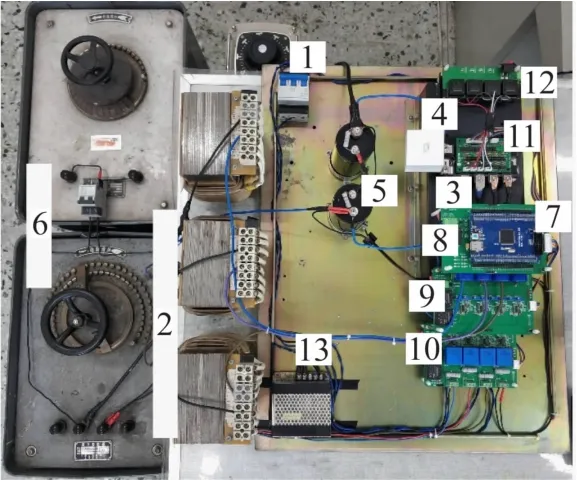
图6 PWM实践教学平台实物图
实验过程中采用了传统的电压、电流双闭环控制策略,通过上位机设置直流母线给定电压,变阻箱可以切换负载。控制系统检测到负载与电压变化,调节PWM脉冲的占空比,使直流母线电压保持恒定。图7为满载与半载切换过程中的直流母线电压、电流和网侧三相电压、电流波形。以直流母线电压70 V为例,负载电阻满载时为23 Ω半载时为46 Ω。可以看出不论满载还是半载,网侧A相的电流都实现了正弦化,谐波畸变率很低,并且与网侧A相电压同相位,证明系统在单位功率因数下运行。且负载切换后,直流母线电压能够迅速调节回到70 V并保持恒定。
实验结果表明,开发出的PWM整流器实践教学平台可以实现PWM整流器控制策略的验证。
5 结 语
开发出的PWM整流器控制系统实践教学平台,使学生能够从电路设计阶段一直到系统调试阶段全程参与,锻炼了其动手实践能力,同时提高了学生做实验的积极性。学生还可以按照自己的想法修改程序,测试并通过实验验证不同控制算法的有效性。同时在实验过程中养成发现问题、自主解决问题的能力,为高级工程技术人才的培养提供了有力支撑。
猜你喜欢
科学家(2021年24期)2021-04-25
自动化学报(2019年12期)2020-01-19
汽车维护与修理(2019年3期)2019-08-08
汽车维护与修理(2018年5期)2018-09-29
汽车维护与修理(2018年23期)2018-07-03
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
汽车维护与修理(2017年5期)2017-11-17
电子制作(2017年19期)2017-02-02
通信电源技术(2016年4期)2016-04-04