
飞机起落架加载控制系统仿真与分析
2020-07-04 08:43罗枭
科技与创新 2020年12期
罗枭
飞机起落架加载控制系统仿真与分析
罗枭
(中国电子科技集团第十研究所,四川 成都 610036)
为了应对国际国内形势的不断变化,中国加大了对航空航天领域的投入。针对起落架加载控制系统的研究对航空航天领域的发展至关重要。在总结针对起落架加载控制系统的技术难点和国内外研究现状之后,利用Simulink分别对无干扰的系统和有位移干扰的系统进行仿真分析,得出静止特性和加入扰动后的系统特性。在此基础上,介绍了应用前馈补偿来消除多余力的方法,并通过这种方法得到改进后的系统。对改进后的系统进行仿真分析发现,该系统能有效克服多余力的影响,使系统达到良好的加载效果。
加载控制系统;多余力;前馈补偿;起落架
1 引言
随着科技的不断进步,加载技术在设计方案验证、产品性能指标测评和设计方案改进等多个科研领域都得到了广泛应用,并处于逐渐完善阶段。一方面,研究加载技术是中国航空航天科研领域不可或缺的重要一环,起落架加载控制系统作为飞机地面试验的重要组成部分之一,是众多新型号和新技术研发过程中的核心点;另一方面,针对飞机起落架加载控制系统的研究存在难点,比如飞机起落架会受到飞行的动力、气动力等共同作用,飞行的高度、速度、姿态和气流等因素会同时引起气动力的改变。起落架必须在承受这些变化力的同时保持正常收放。因此,获得起落架在真实工作状态下的无偏载荷参数,对研制出一套具有高自动化程度、测试精度的起落架加载控制系统具有重要作用,进而能够提高飞机的飞行质量。此外,本文介绍了起落架加载控制系统以及目前面临的技术难点和国内外研究现状,结合文献中已有模型进行仿真分析,并应用前馈补偿消除多余力的方法对系统进行改进。
2 起落架加载控制系统的技术难点及研究现状
2.1 电液加载系统概述
电液加载系统是以液压作动器为执行机构的电液力伺服加载系统,它具有反应迅速、输出载荷大、动态性能好、控制精度高、抗干扰能力强等优点,被广泛应用于地面模拟加载设备中。电液加载系统能够准确、快速地复现飞机飞行过程中起落架受到的气动力载荷,保证了起落架真实工作状态下性能参数的测试,为飞机的操作系统、起落架收放的设计和改进提供了重要的参考实验数据,保障了飞机的飞行品质。电液加载系统根据应对加载对象状态不同,分为两种加载系统,主动式加载和被动式加载。主动式加载过程中,被加载对象处于静止状态,则系统称为主动式/静止电液力伺服加载系统,系统结构比较简单,加载控制容易实现;被动式加载过程中,被加载对象按一定规律自主运动,则系统称为被动式/运动电液力伺服加载系统,系统存在由被加载对象主要运动引起的干扰,加载系统受到加载指令与运动干扰量的同时作用,系统结构变得复杂,不易实现对加载系统的控制。究其实质,两种系统的主要区别在于系统是否存在被加载对象主动运动引起的系统干扰。课题中,前起落架按照指令运动,因此,加载系统是一个典型的被动式电液力伺服加载系统。电液加载系统是典型的电液力伺服系统,具有高频带、非线性、参数时变、不确定性等特点,同时受到被加载对象主动运动引起的干扰,其控制器的设计与一般控制系统相比更为困难。近年来,随着控制理论的发展,电液力伺服控制理论也相应得到了突破,一些新的智能控制理论逐步应用于电液力伺服系统,并取得了较好的效果。
2.2 技术难点
起落架加载系统由计算机控制系统、加载系统两部分共同组成。起落架加载系统能否模拟飞机飞行时起落架所受气动力载荷的真实状态,是能否准确测定起落架实际工作时的各项性能参数的关键。起落架主动运动会产生电液加载系统跟踪误差,因此,首要问题是在负载模拟器控制中消除起落架运动引起的位移干扰。设计出能够在较宽频带范围内消除系统位移干扰、满足加载精度的控制器,使负载模拟器能较真实地模拟起落架实际工作状态是系统主要的技术难点。
2.3 研究现状
目前,国内外针对影响电液加载系统加载精度位移干扰问题进行研究的文献,主要通过以下2个方面对位移干扰进行抑制:①从电液加载系统的硬件入手,改变系统本身的硬件结构,修正系统个别环节和参数,减小位移干扰的影响。主要方法为使系统极点重新分布,系统结构、传递函数发生改变,从而提高系统动态性能,达到减小位移干扰的目的。措施为在加载缸的两腔分别安装蓄压器,对液压缸的有效容积、弹性模量进行改变,但受载荷大小、加载梯度的影响较大,此方法的通用性受到了极大限制;使电液加载系统PQ曲线斜率增大,强迫流量引起的压力变化大幅度减小,能够在很大程度上抑制位移干扰,主要措施为安装带连通孔流量阀——在液压缸两腔之间安装带连通孔零开口流量阀,但由于此方法自身特性和线性度较差,实际工程中很少运用;降低系统的连接刚度,使位移干扰的影响较弱,具体为将弹簧安装在被加载对象(起落架)与液压缸之间的机械连接处,但此方法会使系统频带降低,满足不了系统需求。综上所述,改变电液加载系统的硬件结构的方法在减小位移干扰的影响方面作用有限,且具有很大的局限性,同时由于投资成本大、工艺精度要求高、维护不易、效果不理想等因素,此类方法通常不会用于工程中。②从计算机控制系统的软件入手,在系统中加入补偿网络来抑制位移干扰,主要方法为装设前馈补偿器,对加载对象(起落架)自主运动产生的干扰信号进行前馈补偿,从而达到提前抵消干扰信号所产生的力/力矩的作用。此方法简单、易行、补偿效果较好,具有较强的可行性。本文采用此方法来抑制位移干扰。
3 仿真分析与加载系统改进
3.1 系统仿真
本文参考俞帅和周竹(2011)建立的模型,进行Simulink仿真分析。
参考的数学模型系统负载力L与输入指令in的关系式如下:

无位移干扰信号时的输入信号如图1所示,输出的信号如图2所示。通过仿真结果发现,该系统在无干扰时存在误差,但输出结果显示这个系统的设计思路是正确的,系统主体部分的设计是正确的,只需将这个系统的误差做一个补偿控制来抵消产生的误差即可得到正确的系统。

图2 输出信号图与其局部放大图
有位移干扰信号时,仿真模型如下,输入信号如图3所示,干扰信号如图4所示,输出信号如图5所示。从图3与图5可以看出,有了位移干扰后,系统的输出与给定的指令有较大差异。误差原因分析:从数学模型式式(1)的结构上可以看出,电液伺服加载系统的输出力是由2个部分组成的,经过加载控制指令的输入加载力和由位移干扰引起的多余力,式(1)中的分母携带上分子中的第一项表示的是经过加载控制指令的输入加载力。式(1)中分母携带上分子中第二项与第三项表示的是起落架位置系统对电液伺服加载系统输出的扰动作用所引起的输出力。在低频段工作时,起落架位置系统主动运动引起的强干扰主要是由位置系统对加载系统输出的速度扰动所引起的。承载对象的运动速度、承载对象的加速度和加速度的变化率都会对多余力的输出值产生影响。
3.2 前馈补偿和改进的加载系统
起落架的主动运动是引起系统位移干扰的关键,解决位移干扰需从起落架的主动运动入手。如果起落架和负载模拟器可以同步运动,即负载模拟器能够准确地跟随起落架的主动运动,则就能消除由起落架主动运动而引起的扰动,保证系统负载模拟器的输出精度。基于以上分析可知,负载模拟器提前对起落架的主动运动进行补偿,则可以实现负载模拟器与起落架的同步运动。实际工程当中通常采用前馈补偿、速度同步等方法来消除系统的位移干扰。
设计前馈补偿的基本思路为:首先分析系统可能受到哪些外部干扰,系统是如何引入这些干扰量的,在控制器输出控制量时,针对这些外部干扰设置前馈通道,预先加以补偿。前馈补偿的关键是寻找一个可观测变量,并根据其设计前馈补偿器。利用前馈补偿的原理消除系统位移干扰具有结构简单、易实现、信号传递迅速、调节方便、成本低等优点,具有较好的效果等特点,在实际工程中经常采用此方法来抑制位移干扰。前馈补偿利用PID控制器来满足,参考王纪森、周宇和王俊(2009)设计的PID控制器,取合适的参数值后,补偿后的系统仿真结果如下,输入信号如图6所示,干扰信号如图7所示,前馈补偿后输出的信号如图8所示。利用前馈补偿矫正控制信号之后,将图5与图8相比,加载特性曲线获得了明显的改善。

图3 输入信号图

图4 干扰信号图

图5 有位移干扰的系统仿真结果图
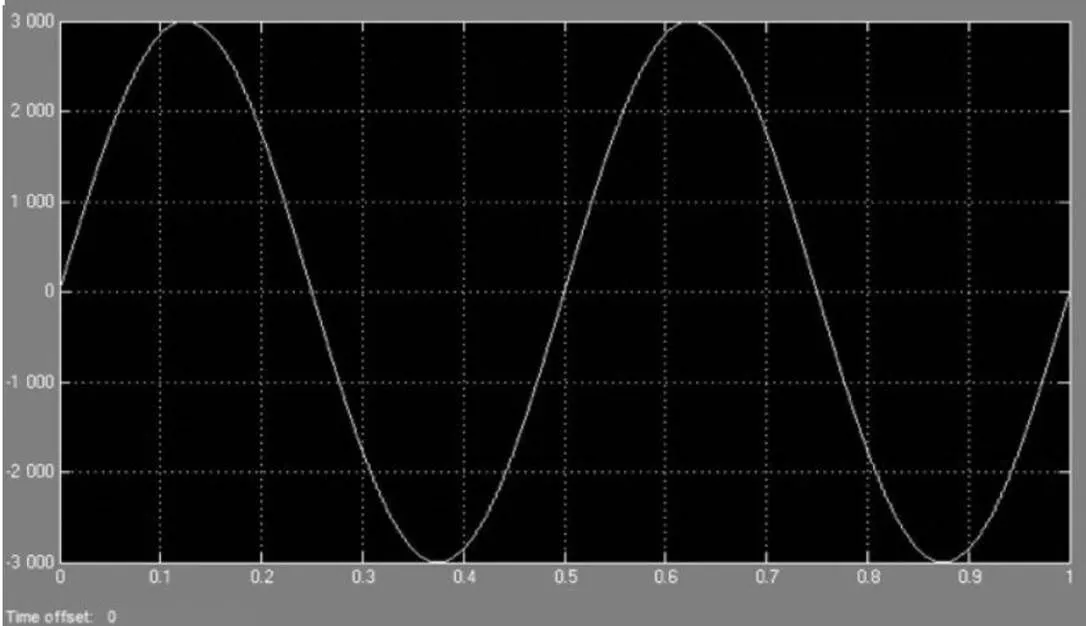
图6 输入信号图
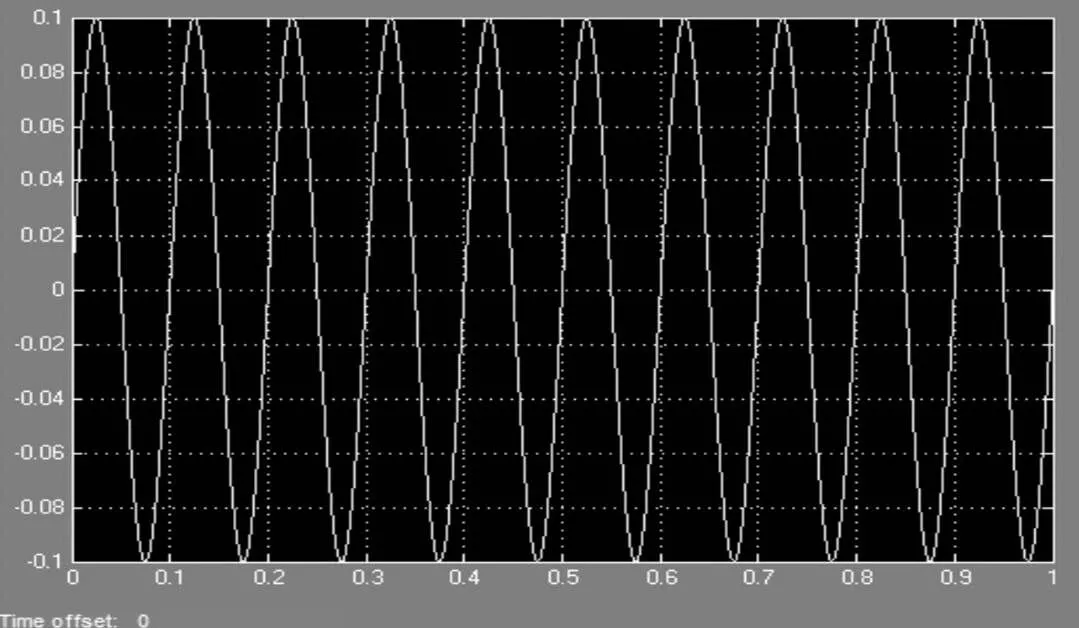
图7 干扰信号图
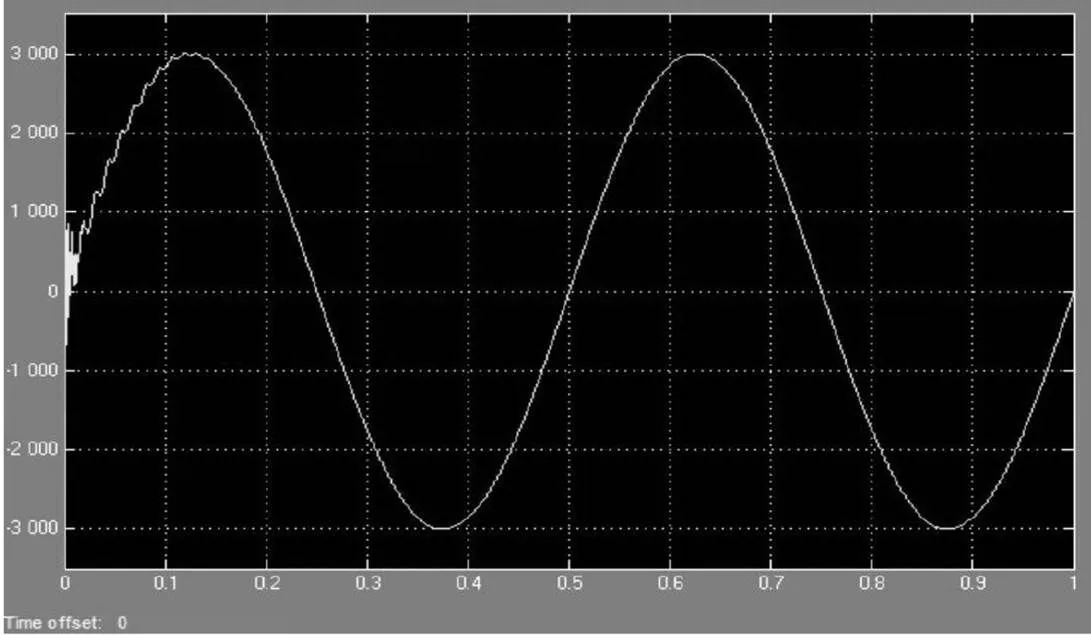
图8 补偿后系统输出信号图
4 小结
起落架加载试验是飞机地面试验的一项重要内容,目前国内的发展已趋于成熟。当飞机的起落架在空中进行收放动作时,会受到动力、气动力等共同作用,从而使地面静止收放的参量不能作为控制起落架收放系统的指令。因此,在做地面试验时,应当对起落架在空中作动时所受的各项力进行模拟,从而使正确的工作指令能够传达到起落架收放系统。本文完成了对某型飞机起落架加载控制系统仿真的探讨。为了验证系统的可行性,分别从系统有位移干扰时的仿真以及系统的补偿矫正2个方面进行了论证。对整个系统在无干扰、有干扰以及加入补偿后的3种情况进行了Simulink仿 真,并分析了结果,验证了补偿方法的可行性,期使系统更加完善。
本文为深刻理解起落架在空中收放的动作过程及每个时刻的受力情况提供了数据支撑,为改进飞机起落架加载系统提供了改进方向。
[1]俞帅,周竹.起落架电液伺服加载控制系统设计与研究[J].液压气动与密封,2011(2):62-65.
[2]王纪森,周宇,王俊.应用前馈控制提高起落架加载系统性能的方法研究[J].机床与液压,2009(4):92-93,99.
V245.5
A
10.15913/j.cnki.kjycx.2020.12.008
2095-6835(2020)12-0021-03
〔编辑:张思楠〕
猜你喜欢
矿山安全信息(2022年11期)2022-11-26
兵器装备工程学报(2022年7期)2022-08-10
计算技术与自动化(2022年2期)2022-07-04
北京航空航天大学学报(2022年6期)2022-07-02
海军航空大学学报(2021年1期)2021-09-01
中原商报·科教研究(2021年6期)2021-05-13
科学导报·学术(2020年49期)2020-12-06
北京航空航天大学学报(2020年10期)2020-11-14
百科探秘·航空航天(2020年8期)2020-07-29
百科探秘·航空航天(2020年6期)2020-07-09
