
太阳自动跟踪闭环控制系统设计
2020-07-04 08:34张梦杨单麟婷
科技与创新 2020年12期
张梦杨,单麟婷
太阳自动跟踪闭环控制系统设计
张梦杨,单麟婷
(沈阳大学国际学院,辽宁 沈阳 110044)
系统以MCU(STC12C5A60S2)低功耗芯片为核心控制元件,通过姿态测量、光信号检测及电机驱动等模块,实现了太阳自动跟踪的闭环控制。介绍了系统的整体设计思想和各个部分设计的技术细节,提出了视日运动轨迹跟踪粗调和光信号跟踪细调的控制策略,利用这种跟踪控制策略,在保证跟踪控制精度的基础上,可以极大地提高系统的可靠性和抗干扰性。
自动跟踪;闭环控制;单片机;科技工作者
为了更好地利用太阳能能量,国内外广大科技工作者对太阳自动跟踪技术进行了深入研究,提出了利用各种机械结构和各种类型传感器来实现对太阳跟踪的目的[1-7]。美国BICALACE在1997年研制了单轴太阳能跟踪系统,实现了太阳东西方向的自动跟踪,使热接收率提高了15%[8]。1998年美国成功研制了ATM双轴跟踪器,并在太阳能面板上装有集中阳光的涅耳透镜,从而进一步提高了热接收效率。国家气象计量站研制的FST型全自动太阳跟踪器,弥补了赤道架型太阳跟踪器的缺点,具有全天候、全自动、跟踪精度高等优点[9]。但是此跟踪器采用具有恒功率输出的步进电机驱动方式,低速时易出现低频振动现象,高速时扭矩又会减小,且其控制又为开环控制,当负载过大或启动频率过高时易出现丢步或失步的现象。
1 系统设计
系统由三自由度运动平台组成执行机构,分别由A、B两台直流电机驱动,使其接近于太阳光线垂直方向,通过调整采光设备的姿态,实现了最大限度接收太阳能的目的,控制电路部分安装在平台上,其结构如图1所示。
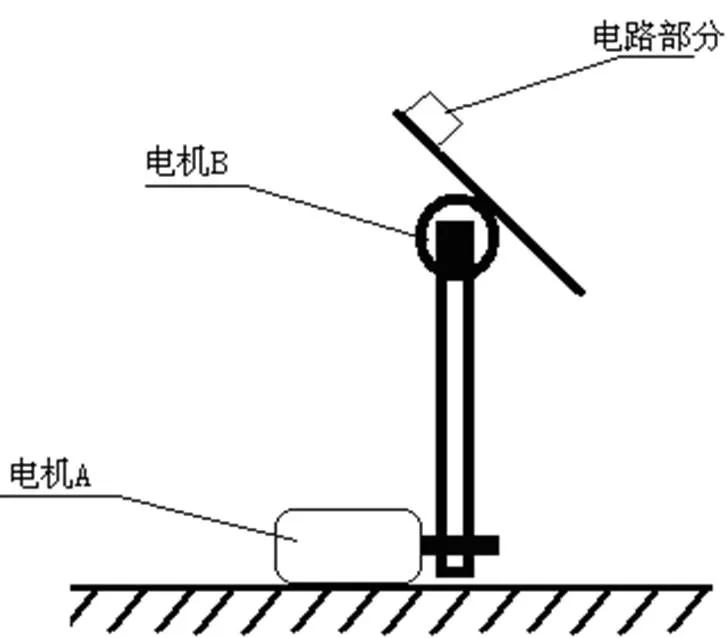
图1 系统结构简图
控制电路包括主控模块、电机驱动模块、数据存储模块、光信号检测模块、时间模块、姿态测量模块、电源模块、通讯模块及看门狗电路构成,其结构如图2所示。
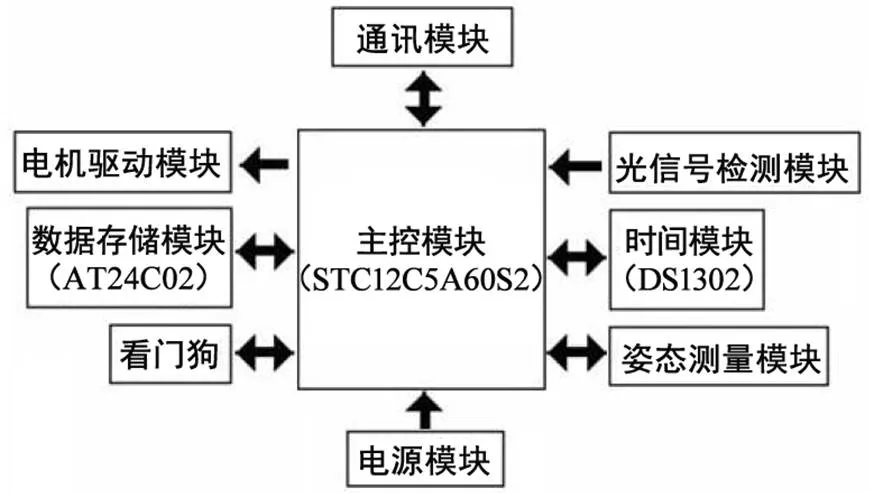
图2 硬件结构框图
主控模块是设备的核心器件,选用STC12C5A60S2单片机,负责整个系统的运算、处理、协调、指挥和管理工作。光信号检测模块采用4个LXD7526光敏元件,用来检测太阳的光照强度。DS1302作为时间模块,通过SPI接口为主控模块提供实时时钟;电源模块选用LM2576,将直流12 V转换为5 V;姿态测量模块选用ADXL345,通过I2C为主控模块提供当前设备三自由度的姿态;数据存储模块选用AT24C02,用于记录太阳运动轨迹数据;电机驱动模块运用隔离驱动和续流保护实现对直流电机的驱动;通讯模块提供RS232通讯的物理连接;为了提高装置的可靠性,选用片内功能实现看门狗。
控制软件包括主程序模块、电机控制模块、视日运动轨迹跟踪模块、模拟量计算模块、角度计算模块、数据存储模块和通讯处理模块。
主程序模块主要完成对装置的初始化,并协调各个模块之间的工作;电机控制模块通过将控制电机运行的执行数据生成PWM信号,实现对电机运行控制;视日运动轨迹跟踪模块主要计算太阳在各个时刻的运动轨迹;模拟量计算模块用来处理光敏信号检测模块采集的数据;角度计算模块通过将视日运动轨迹跟踪计算的数据和模拟量计算模块的数据进行比较,并换算成控制电机运行的执行数据;数据存储模块实现数据的记录与存储;通讯处理模块通过RS232实现装置与上位机的通讯。
2 视日运动轨迹计算
太阳在各个时刻的运动轨迹主要由视日运动轨迹跟踪计算模块完成。在地平坐标系中,跟踪系统就是对太阳方位角和高度角的跟踪。一年中每天固定时刻的太阳方位角和高度角是一定的,可以由Cooper方程[10-11]近似计算。
太阳倾斜角的计算公式为:
=23.45sin[360(284+)/365] (1)
式(1)中:为从1月1日起一年中的第几天。
太阳时角的计算公式为:
=15(12-) (2)
式(2)中:为当地太阳时。
的计算公式为:
=+-4(120-loc) (3)
式(3)中:loc为当地经度;为时差,min。
时差的计算公式为:
=9.87sin2-7.53cos-1.5sin(4)
式(4)中:=360(-81)/364。
太阳高度角s的计算公式为:
s=arcsin[(coscos+sin)sin] (5)
式(5)中:为当地纬度。
太阳方位角s计算公式为:
s=arcsin(cossin/coss) (6)
通过以上算法的计算分析,建立了有效的太阳轨迹跟踪模型。
3 控制方法及实现
光源跟踪系统的控制方法:为了实现快速、准确跟踪太阳运转的目的,本装置采用视日运动轨迹跟踪粗调,光信号跟踪细调的跟踪控制方法。系统上电后通过视日运动轨迹计算出当前时刻太阳的方位角和高度角,在直流电机驱动下使该系统运行至正对太阳的位置,通过光信号检测模块采集的数据对设备在±5°的范围内进行调整,可以有效提高太阳跟踪的效率,并减弱环境因素对太阳跟踪精度的影响。
根据跟踪控制方法编写程序,系统初始化后,先对装置的姿态进行测量;再运用DS1302的时间信息计算视日运动轨迹,得出当前太阳的方位角和高度角,然后进行光信号的采集;对视日运动轨迹的数据进行存储,判断装置的姿态是否在调整范围内。如果满足条件,根据光信号对设备进行调整;如果不满足条件,根据视日运动轨迹的计算结果直接对电机进行调整。程序主流程如图3所示。
串口是单片机和上位机之间通讯的一个媒介,系统运用串口将调试信息和系统状态信息发送至上位机,方便查看和调试。系统通过串口中断实现通讯功能,当下位机接收到串口命令后进行比较,然后跳转到相应的功能程序中去。程序的各个模块在系统滴答时钟节拍下运行,滴答时钟由时间间隔为1 ms的定时器中断时产生,进入定时器中断服务程序后对不同的标志计数变量进行累加,形成不同的时隙。
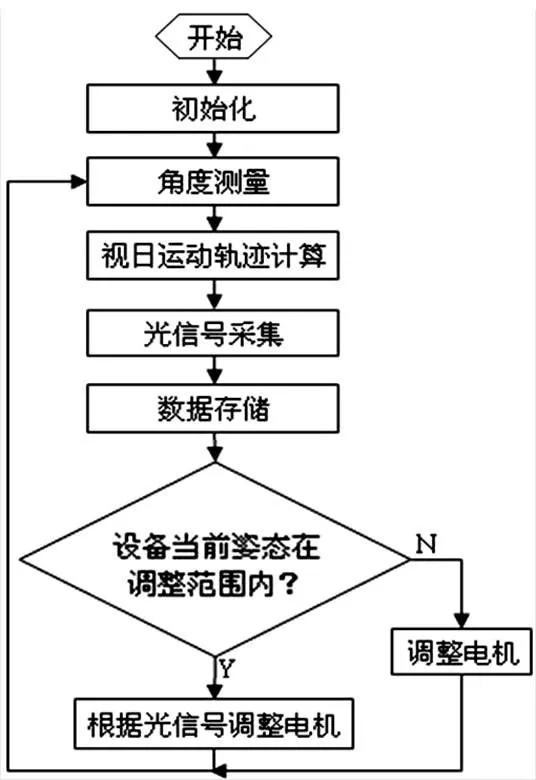
图3 主程序流程图
4 结论
通过对现有视日运动轨迹跟踪方法的分析,利用光敏元件主动寻找太阳位置,计算出以时间、经纬度为参数的高精度太阳位置,把角度传感器作为设备姿态的反馈回路。根据姿态反馈信息实现高精度的控制策略。同时,视日运动轨迹跟踪与主动跟踪相结合,既消除了环境对跟踪的影响,又实现了对太阳的自动跟踪;系统具有结构合理、受环境条件影响较小等优点。
[1]DOU W,XU H H,LI J.A nalysis of solar PV tracking system[J].Acta Energiae Solaris Sinica,2007,28(2):169-173.
[2]潘良煜,魏宁,董磊超.基于MCU的光伏智能跟踪系统的研究[J].电气制造,2013(4):48-50.
[3]HELWA N H,BANGAT A B G,ELSHENAWY E T.Maximum collectable solar energy by different solar tracking systems[J].Energy Source,2000(22):23-34.
[4]LIU X Y,XU R J.Research on the tracking system based on UKF filter and fuzzy-PID controller[J].Journal of Hebei United University,2013,35(2):63-67.
[5]LU W H,HE X L,JUN Y H.Developent of full-automatic solar tracker and its applications[J].Optics and Precision Engineering,2008,16(12):2544-2550.
[6]王广军,吴香英,王鸿雁.全自动太阳光线跟踪系统[J].太阳能,2013(3):15-19.
[7]邸韬.基于ATmegal 28单片机的碟式太阳能跟踪控制系统[J].装备制造技术,2011(5):20-22.
[8]闫秋娟,蒋猛.太阳能电池板自动跟踪装置的研究进展[J].科技创新与应用,2013(14):14-15.
[9]于贺军,吕文华.全自动太阳跟踪器软件的设计和研究[J].气象水文海洋仪器,2001(2):7-11.
[10]JOHN A D,WILLIAM A B.Solar engineering of thermal process(fourth edition)[M].New Jersey:Wiley,2013.
[11]GUI W S,LI T,LU Y B.Improvement of solar position formula and its application[J].Water Resources and Power,2011,29(9):213-216.
TP29
A
10.15913/j.cnki.kjycx.2020.12.005
2095-6835(2020)12-0015-02
张梦杨(1997—),女,辽宁沈阳人,主要从事工业工程、智能算法等方面的研究。
〔编辑:张思楠〕
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
防爆电机(2022年2期)2022-04-26
学生天地(2020年3期)2020-08-25
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
诗选刊(2015年4期)2015-10-26
股市动态分析(2015年24期)2015-09-10
电影新作(2014年5期)2014-02-27
