无人集群智能逃逸控制算法与仿真
2020-07-02 01:43王辉顾村锋王波兰顾龙飞穆维民
指挥与控制学报 2020年2期
王辉 顾村锋 王波兰 顾龙飞 穆维民
1.上海机电工程研究所上海201109
无人机最早出现在第一次世界大战期间,主要用于执行“枯燥的、恶劣的、危险的、纵深的”(Dull,Dirty,Dangerous,Deep,4D)任务[1].随着计算机科学与智能化技术的发展,无人机技术与产业得到快速发展,在军用领域和民用领域都开始发挥重要作用[2].使无人机真正具有实战化应用前景的技术主要来自于智能化态势感知与集群协同控制技术[3].无人机集群协同控制广义上的定义是指不同的无人飞行器,围绕同一个作战任务,通过网络通信与信息搜集、交汇、计算等过程,自主完成动作配合的过程[4].狭义的集群协同控制是指多个无人个体基于通信条件下,通过群控算法,保持最佳姿态队形飞行直至完成任务需求的过程.2018年1月6日,俄罗斯驻叙利亚海空军基地遭到13 架不明身份的无人机攻击,展示出无人机蜂群战术的巨大潜力[5].目前随着智能技术的突飞猛进,无人机的自主能力还在不断发展,美国的DARPA 启动的“小精灵” 项目甚至赋予了无人机集群空中投放与回收功能,无人机与有人机的结合将极大地改变未来战场作战样式形态[6].
另一方面,世界各国都在着力研究制衡无人集群的技术手段,目前拦截无人机的技术手段有传统的火炮、导弹等方式,还有新型的高功率微波、电子干扰、网捕导弹、武装直升机[7]等武器.作为无人机本身而言它所面临的生存环境也越发恶劣,在集群飞行的条件下做到自主智能的逃逸尚无有效的控制方法[8].本文在无人集群飞行器飞行行为研究的基础上,从常规防空导弹/防空无人机武器所用的寻的追踪原理出发,探索了一种新型的逆向视线转率逃逸算法.
1 无人集群基本运动行为
为了定量阐述无人集群与拦截导弹的相对运动关系,引入拦截坐标系OXYZ,其定义如下:O为发射瞬时导弹质心在地面上的投影;OX为在过原点的水平面上,指向导弹发射瞬时无人集群目标几何中心在水平面内的投影方向;OY为在包含OX轴的铅垂面内,与OX轴垂直,向上为正;OZ为垂直于XOY平面,按右手定则确定指向.该坐标系可认为是与大地固连的惯性坐标系,将其平移至拦截导弹位置,如图1所示.

图1 坐标与变量定义
在此坐标系基础上,对无人集群的飞行行为进行数学建模.
1.1 一般运动模型
忽略重力,易知任意一个目标的运动学方程和动力学方程如下:

其中,nzt和nyt分别为该目标的横向和纵向机动过载,由无人集群控制策略确定.
1.2 集群基础飞行行为
为了保证集群系统正常飞行和在遇到障碍或偶然干扰时具备队形重构的能力,借鉴群智能思想,将集群系统内部成员的基本飞行包括:内聚、跟随、自导引、分散和同盟[9].
1)内聚:集群飞行指令中的内聚分量可以使系统内部成员相互靠拢,不至于某个个体距离太远以至于掉队.其算法原理是生成指令让无人机的速度朝着可探测友方成员的几何中心飞行.为了避免碰撞,若当前成员距离群体质心距离小于最小安全距离时,内聚作用消失.
2)跟随:集群飞行指令中的跟随分量可以使系统内部成员之间保持一个前后有序的阵型.其算法原理是生成指令,让其速度矢量指向距离其最近的两名成员的几何中心.
3)自导引:集群飞行指令中的自导引分量可以使系统内部成员朝着任务系统指定的区域飞行.其算法原理是生成指令,让每个个体的速度矢量指向目标区域点的坐标.
4)分散:集群飞行指令中的分散分量可以使系统内部成员相互远离.飞行器保持一定的最小安全距离是必要的,这不仅是确保成员个体之间不会因为偶然因素导致相互碰撞,更重要的意义在于面对敌方拦截武器的面杀伤火力时,尽量减少损耗[10].其算法原理是生成控制指令,当自身周围存在距离小于smin的成员时,产生指向这些成员反方向的过载指令.若当前成员距离群体所有个体中距离小于的那个成员之间的距离大于安全作用距离时,分散作用消失.
5)同盟:集群飞行指令中的同盟分量可以使系统内部成员的飞行速度趋于一致,保持整齐稳定的飞行阵型.其算法原理是生成指令,使自身的速度矢量指向全体个体的平均矢量方向.
2 无人集群逃逸控制算法
无人集群飞行器的主要威胁来自于防空导弹和反无人飞行器,采用破片火力硬毁伤或者近年来才发展起来的弹射网捕集群成员的软杀伤手段[11].无人集群飞行器必须采取有效的逃逸措施,以保证自身生存与使命任务的顺利完成.当集群成员感知防空导弹或反无人机威胁时进行实时自主逃逸,在威胁警报解除后,无人集群需要自主完成阵型重构[12].
2.1 导弹寻的导引原理
现代防空导弹或反无人机飞行都采用自主或半自主寻的导引,常采用的是经典比例导引或者各式改良后的比例导引律[13],且采用过载控制[14].三维比例导引律从三维空间来看,根据定义有[15]:式中:nnn为过载矢量;N为有效导航比;Vr为相对速度大小;ω 为视线角速度矢量;lll为沿着视线方向的单位矢量.
而寻的导引的过载指令通过控制系统作用到导弹上,使得导弹与目标在理想状态下呈现平行接近的状态.即导弹寻的的导引原理是,使得被追踪的目标与自身的视线角速度为零,利用自身的速度优势,逐渐接近目标,最后通过直接碰撞或在目标附近无线引爆炸药.
2.2 逃逸控制算法
根据导弹寻的导引的原理,当导弹和无人集群成员的视线角速度很小时,说明两者在平行接近,即面临被打击的威胁;当两者的视线角速度较大时,说明导弹的脱靶量在变大,追踪弹道不收敛,目标处于较安全的状态.基于这个原理,考虑采取如下逆向视线转率逃逸算法:

其中,nyt、nzt为竖直平面与水平内的逃逸过载指令,Na为逃逸比例系数,sign 为取符号运算符,、分别为俯仰视线角速度和偏航视线角速度,q∗为期望的逃逸相对角速度,Vt为无人机成员自身与拦截器的相对飞行速度标量,g为重力加速度.
将集群基础飞行行为与上述逃逸行为进行结合,可以得到无人集群成员逃逸的算法:

其中,p为基础飞行行为的个数,τ 为某一飞行行为的权重系数;当某一成员感知到威胁时,τp+1系数取某一正数,否则取0,即不进行逃逸机动.某一成员感受到威胁的定义是,当机上传感器检测到附近一定距离ρc内存在敌方目标,这个距离应该明显小于传感器探测距离ρ.
3 仿真
为了验证无人集群飞行器的基础飞行行为和逃逸飞行行为可以有效规避敌方拦截手段,对一定条件下的工况进行仿真,包括基本飞行行为和逃逸仿真飞行行为.仿真对抗双方是机动能力相当的低速飞行无人机.仿真参数设置如表1.

表1 仿真参数设置
表1中的“内聚参数”、“跟踪参数”、“引导参数”、“分散参数”、“同盟参数”、“逃逸参数”即为式(4)中的权重系数τ.
3.1 基本行为仿真
为了对内聚作用进行效果仿真,选取仿真条件如下:集群个数3 个,集群个体初始投放间距200 m,内聚规则作用前后的对比如图2所示.

图2 内聚行为对比图
可以看到在内聚行为规则作用前,梯队始终保持相互之间200 m 左右的初始间距,当内聚行为作用后,集群个体之间的距离迅速收拢到最小安全距离100 m 左右.跟随行为与内聚作用类似,不作赘述.
为了体现分散行为规则的作用效果,设定集群个体初始投放间距50 m,集群目标个数6,分散规则作用前后对比如图3所示.
可以看出,分散规则作用前的集群之间距离一直处于安全距离以内,并未分开,而分散规则作用后集群在一定波动后可以控制在理想距离附近.
为了体现同盟行为的规则作用效果,设有6 个数量规模的集群无人机,同盟前后的飞行队伍对比如图4所示.

图3 分散行为对比图

图4 同盟行为对比图
从图4可见,同盟规则使得集群内所有个体的速度矢量呈现一致的状态,该规则保证了无人集群按一定的编队飞行而不至于相互发散.
为了体现自引导行为规则的作用效果,设定无人集群的任务目标位置为xI=-1 000 m;yI=500 m;zI= 0 m,观察自引导规则作用前后的区别如图5所示.
从图5可见,自导引规则使得集群不仅可以在协同飞行的过程中飞向预定任务目的地,而且有使得集群队伍更加协调一致的作用,即共同的作战目标使得整个集群飞行更加稳定.
3.2 逃逸行为仿真
拦截器导航比取2.5,拦截器选取对己方威胁最大的目标进行拦截,观察集群目标在逃逸控制算法控制下的飞行动作.
有拦截武器拦截,但无人集群未逃逸和逃逸的对比如图6、图7所示.
从图6可见,若目标不作逃逸机动,则很容易被拦截.
从图7可见,集群目标一开始投放间距较小,此时为了保持安全,分散作用开始起效,使个体间拉开安全距离;飞行时间在90 s 之前时,由于无人集群尚未探测到拦截器威胁,通过跟随与同盟以及自导引规则正常飞行;当过了90 s,无人机感知到拦截武器,逃逸行为触发,并迅速按照逃逸策略控制飞行器进行机动逃逸,为了保持阵型,内聚与同盟依旧发挥作用;当飞行时间到120 s 时,拦截器过靶,拦截失败,集群个体完成逃逸并依照自导引等基础飞行行为按原定目的地继续执行任务.整个过程表明所提逃逸控制算法与基础飞行行为能有效配合,控制无人集群进行机动逃逸与队形重构.
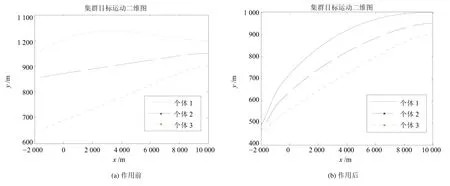
图5 自导引行为对比图

图6 目标无逃逸


图7 集群机动运动图
4 结论
针对无人集群飞行器的阵型保持与威胁躲避问题,本文研究了各种基础飞行行为对阵型的影响,并提出了一种新型的逆向视线转率逃逸算法.研究结果表明:1)无人集群的同盟和自导引对飞行稳定性和阵型一致性具有重要调节作用,而内聚跟随和发散则对控制集群个体之间的间距具有重要影响.2)所提逃逸控制算法可以有效完成逃逸与阵型自重构,对协同控制工程领域具有一定的借鉴意义.
猜你喜欢
农业工程学报(2022年11期)2022-08-22
北京航空航天大学学报(2021年4期)2021-11-24
航天器工程(2021年5期)2021-10-15
学校教育研究(2020年11期)2020-06-08
航空科学技术(2019年2期)2019-09-10
动漫界·幼教365(中班)(2018年6期)2018-05-14
知识就是力量(2017年2期)2017-01-21
企业文化·中旬刊(2016年5期)2016-05-16
冰雪运动(2016年5期)2016-04-16
中华少年(2009年9期)2009-09-14