集群化多功能载人月面着陆/上升器概念设计
2020-07-02 09:44:04白雪,徐明∗,彭坤
载人航天 2020年3期
白 雪,徐 明∗,彭 坤
(1. 北京航空航天大学宇航学院,北京100191; 2. 北京空间技术研制试验中心,北京100094)
1 引言
从上世纪50 年代开始持续至今,先后出现了美国的阿波罗计划、苏联“月球”系列、中国嫦娥探月工程等多项月球着陆任务。 作为载人登月最重要的技术之一,载人月面着陆/上升器要求具备能够将航天员与相关技术设备安全送达月面,保障月面活动实验支持,并最终能够成功将航天员与实验数据送到返地轨道的能力。 其决定了月球探测的结果、月面活动范围、月面实验的可靠性等,对于发射回收成本、系统工作效能、着陆上升安全系数等提出了较高要求。
美国阿波罗计划提出了极具创新性的载人登月方案[1]。 阿波罗登月舱主要采用2 级构型,上升级、下降级相互独立。 上升级为着陆器主体,包含航天员工作空间、仪器舱、控制系统和返回发动机等。 下降级主要由着陆推挤系统和缓冲装置构成,负责在着陆器下降过程中提供减速、机动等。阿波罗登陆月面并开展月面实验过程中,上升级和下降级相互连接。 完成月面任务后,上升级搭载航天员起飞离开月面,而下降级留在月面并不返回绕月轨道。
阿波罗计划攻克了飞船交会与对接技术、载人登月舱级间分离技术、月面软着陆技术等,从月球表面带回了大量样品和科学数据,使人类加深了对月球的认识,对人类进一步了解月球做出了巨大的贡献。 但受限于当时的技术水平,所设计载人登月系统,均将各项探测设备集中在登月舱,具有如下问题:①登月舱受到空间和携带载荷等限制,为一次性使用,项目花费巨大。 阿波罗计划至第6 次登月成功结束,共耗资255 亿美元;②由于各个功能组件均集成到登月舱且需在地面完成组装,需要土星V 号大推力重型火箭才能运送到登月轨道;③随所载航天员一起月面着陆的月球车、燃料补给以及支持设备等具有更好的抗冲击、振动等能力,而由于集中组装方式使得各部分采用最高等级完成着陆,造成资源浪费;④登月舱所携带的测量、观测、生保等设备过于集中安装,可能出现某一微小部件失效导致整个载人任务失败,阿波罗13 号就是典型案例。
进入21 世纪以来,载人登月方案的要求也相应提高,新一代月面着陆/上升器既要满足任务需求,又要尽可能降低成本、提高利用率和可靠性。 Hoyt[2]等提出一种搭建地月绳系卫星运输系统来实现地月间有效载荷的往返运输。 但该系统需要在执行任务时在月表抓取一定质量的载荷,以保证系统的能量和动量守恒,这一点降低了系统的着陆的可靠性,不能直接用于载人登月任务。 张志贤[3]等提出一种新型轮腿式可移动载人月面着陆器方案,将载人着陆器与月球车功能相结合,实现着陆器月面高速移动和高效避障。 但一体化设计限制了整体质量,对于系统结构的性能要求较高。
本文提出一种新型的集群化多功能载人月面着陆/上升器方案设想,通过对载人登月舱进行集群模块化设计,将原本单一的登月舱进行解构,划分为实现不同功能的独立模块,采用各舱段分批发射和不同等级的月面着陆方式,提高载人登月系统整体可靠性,降低成本,使其可多次重复使用,并具备多种任务扩展应用能力。
2 总体方案
采用集群模块化设计,将原本单一的登月舱进行解构,划分为指令舱、服务舱、运载航天员的登月舱以及功能模块,其中功能模块包括探测舱、仪器实验舱、通讯舱、能源舱以及包含燃料、食物和水等的后勤舱,如图1 所示。
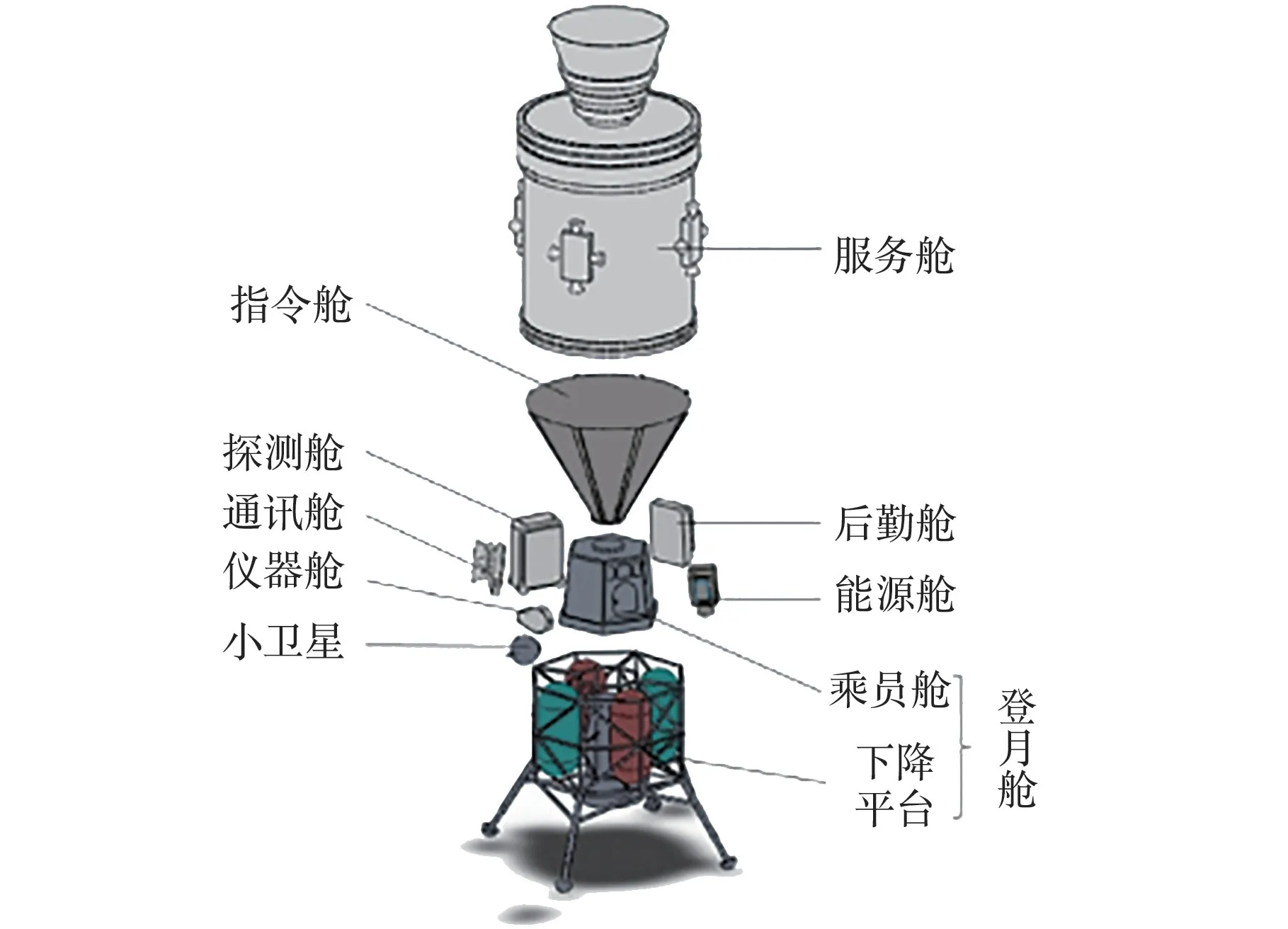
图1 集群化多功能载人月面着陆/上升器结构示意图Fig.1 Structure diagram of clustering multifunctional manned lunar landing and ascent vehicle
该登月系统任务流程设计图2 所示:①将各功能舱段依次发射至空间站进行组合,待指令服务舱乘载航天员抵达后,组合体离开空间站进入登月轨道;②进入环月轨道后,各功能模块以及登月舱依次与指令服务舱在轨分离;③各功能舱段在下降过程中,进行重构控制形成满足着陆要求的编队构型,从而在指定地点完成分布式着陆;④登月舱在下降途中释放小卫星进行撞月实验,并由仪器舱进行月面上长时间的凝视观测;⑤月球车完成着陆地点附近的月面巡视,以及月表物质和地形普查和详查;⑥月面部署的各功能舱段已具备月球基地的雏形,可为未来建设体系更为完备的月球基地进行实验;⑦待任务结束后,采用电机泵火箭发动机的登月舱携带航天员进行月面上升以及与指令舱交会对接,并最终返回地球。 其中奔月速度增量为3.114 km/s,环月制动速度增量为1 km/s。 完成月面任务后,从月球轨道返回地球所需速度增量为13.3 km/s。

图2 采用集群结构的登月系统任务流程简图Fig.2 Mission flow diagram of clustering multifunctional manned lunar landing and ascent system
采用模块化舱段结构设计,能够利用中小型火箭将各功能舱段依次发射至空间站进行组装随后进入登月轨道,从而降低登月的技术难度和成本;各功能舱段相互独立,可根据任务场景不同,灵活调整各个模块体积和质量,搭载不同实验载荷,实现任务需求。 且单一舱段的故障将不会影响到整体任务的完成,后续可通过后勤舱、环月轨道上的指令服务舱以及空间站进行快速补充,将登月任务的损失有效降低,提高系统的生存能力和整体可靠性。
2.1 模块划分
载人登月飞船分为指令舱、服务舱、登月舱、各功能模块舱段以及撞月小卫星。 功能模块舱段主要包括探测舱、仪器实验舱、通讯舱、能源舱,后勤舱5 部分。 由于体积皆小于登月舱,因此这5个舱通过爆炸螺栓固定在登月舱乘员舱四周,在轨分离时使用弹射弹簧将各个舱段与登月舱进行分离。 在登月过程中,指令舱与服务舱始终运行在环月轨道,登月舱与五大功能模块进行月面分散着陆。 在着陆过程中,指令服务舱将释放用于月面碰撞试验的撞月小卫星。 完成月球任务后,登月舱中以乘员舱为上升段返回。
2.1.1 指令舱
指令乘员舱可容纳3 名航天员,配有生命保障系统,通信系统以及飞船控制系统等。
2.1.2 服务舱
服务舱采用与阿波罗计划中登月飞船结构和功能相似设计,为载人登月飞船提供各项服务保障。 其构造较为简单,放置有执行任务时各种供应品、电源、天线以及精密仪器设备。
2.1.3 登月舱
登月舱为月面着陆的核心。 区别于传统登月舱,本文所设计的登月舱仅保留乘员舱和下降段。乘员舱为密封加压筒状结构,内部安装有各类仪表和开关设备。 生命保障系统安装于乘员舱后侧,在进行登月任务时为航天员提供充足的座舱大气、供水、温控保障等。 下降段主要采用桁架结构,由4 个主着陆腿支撑。 登月舱如图3 所示。
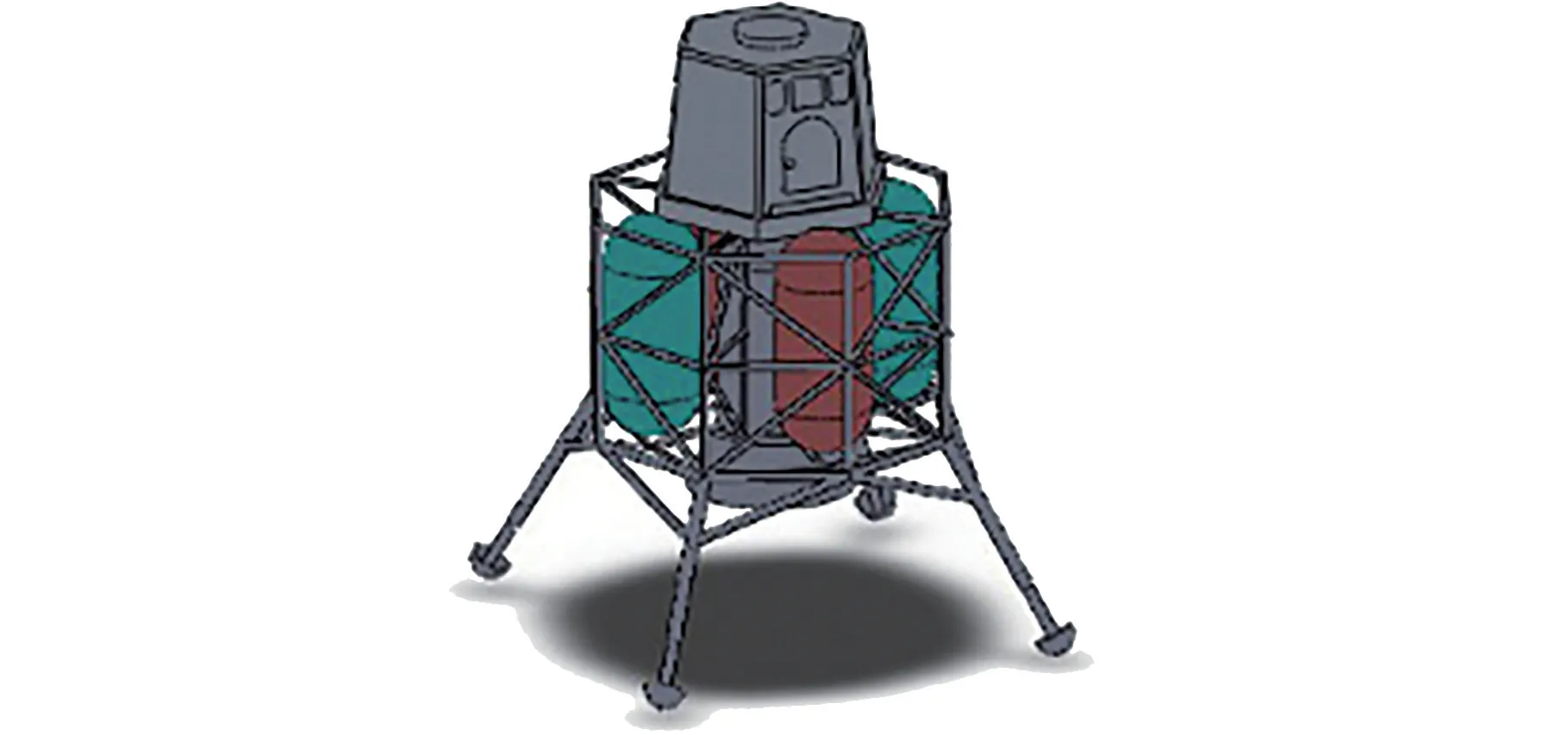
图3 登月舱示意图Fig.3 Structure diagram of lunar module
将传统登月舱各功能模块离散,有助于减少上升级的质量,更少的燃料和氧化剂就可达到下降反冲减速和上升级发射入轨。 同时,登月舱质量的减小也可以让结构机构部分尺寸减小,使其更加轻便。
2.1.4 功能模块舱段
1) 探测舱
探测舱主要装载月球科学考察车,简称月球车。 月球车不仅需要能够独立在月面进行探测,还要满足作为航天员代步工具需求[4]。 由于探测舱固定在登月舱乘员舱侧面,因此月球车采用侧面搭载方式,通过拉杆连接,月球车释放装置初始折叠于探测舱两侧。 当载人登月飞船登陆月面后,拉杆与探测舱解锁,折叠释放装置展开,在月表形成具有一定角度的坡道,月球车沿其行走至月球表面。 除传统有人驾驶和遥操作模式,月球车可采用无人自主模式进行工作,当航天员进行月面作业时,月球车可自动跟随航天员实现联合作业。 待获取月表样本及其相关数据,完成月面任务后,月球车将留在月球表面,不随上升级返回环月轨道。
2) 仪器实验舱
仪器实验舱主要装载登月任务时所需要的相关仪器设备,主要包含中心设备、样本采集装置、月面引力计、月震仪、太阳风分光计、过热离子探测器和阴冷极计等,搭建月球科学实验室,进行月面学、月球测量学和月成学研究。 仪器舱还将装载月壤采集、化验、分析等一体化装置,实现月面空间实验室的搭建。
3) 通讯舱
通讯舱须同时具备同步通信和异步通信功能。 月球系统的各模块由于相距较短,相互之间的通讯延迟低,当有探测数据和指令信号的传输需求,通讯舱作为中转站实现模块间的网络同步通信。 而当月球系统需要与地面进行通信时,由于存在地月距离存在一定延时,通讯舱需要在发送一个请求后,在响应还没到来之前继续处理其他请求,进行异步通信,充分利用通信通道。 为使其能够实现与地面的通信,通讯舱装备有月面数据分系统、指令分系统、调制/解调、射频分系统和天线等。 考虑到大气层对信号较大的衰减作用,可将月面信号传输至近地轨道的通信卫星处理后传输到地面。
4) 能源舱
能源舱的功能是为其他模块提供续航能量,旨在初步建立月面发电站。 当能源舱着陆后,能源舱将自身携带的太阳能电池阵展开,将收集到的太阳能转化为微波能量,并以微波能量的形式向一定距离内的其他模块提供能量。 这种无线的能量传输方式可以使载人登月飞行器对着陆后各模块之间的距离要求大大降低,使载人登月飞行器对能量的管理分配更集中有效。 由于月球与太阳相对位置实时发生变化,因此为了最大限度的获取太阳能,月面太阳能电站的太阳电池阵应具有两自由度转动能力。 太阳能电池基板上安装有光照传感器,将最强光照感应角度反馈给能源舱内部控制系统,再由控制系统进行处理,控制太阳能电池基板转动,实现太阳能电池基板的定向对光调整,从而使太阳能电池基板接受最大光照面积,提高光照利用率。
5) 后勤舱
后勤舱着陆在月球表面,可为登月任务提供后勤保障。 它主要提供的后勤保障包括:生命保障、备用仪器保障以及能源保障。 生命保障部分负责提供消耗品,包括宇航员每天所必需的水、食物等,还配有少数应急使用的氧气瓶;备用仪器保障部分可提供一些易损坏的器件、设备的备份如镜片、太阳能帆板等;能源保障部分有两组燃料电池,同时装有液氧储箱和液氢储箱供其使用。 除此之外能源段还携带少量燃料以防燃料不足。 由于后勤舱不载人,因此无需采用复杂的密封结构,可采用较为规则的圆柱体或长方体。 在返回地球时,后勤舱被留在月面上,舱内所剩余物品在后续登月任务中可以再次使用。 这样做一方面有利于本次返回地球时减重,另一方面可使后续登月任务载荷减轻。
2.1.5 撞月小卫星
在登月舱以及各模块功能舱着陆过程中,指令服务舱将释放用于月面碰撞的试验小卫星。 撞月试验是探究月球组成及起源的重要手段之一。通过分析撞击成功产生的月球尘埃成分可探讨月球的起源,并未下一步其他人类探测器在月球或其他星体精确着陆奠定基础[5]。 以载人登月软着陆为任务目的飞行器,携带小卫星进行撞月实验将拓展月面任务,航天员可驾驶月球车前往小卫星撞击坑,观察月表组查并采集月尘样本,就地开展实验。
2.4 转染pSIREN-hTERT对A2780细胞凋亡的影响 PI染色流式细胞学检测显示:pSIREN-hTERT转染48 h后,A2780细胞凋亡率为(26.76±7.42)%,明显高于对照质粒pSIREN-Con转染组的(3.73±0.78)%及空白对照组的细胞凋亡率(1.33±0.15)%,且差异有统计学意义(t1=9.74,t2=10.82,P<0.05),shRNA对A2780细胞凋亡的影响常规PI染色行流式细胞学检测见图3。
撞月小卫星拟采用低成本的平台化卫星平台,自旋稳定并利用蓄电池供电,质量预计为40 kg、峰值功耗为20 W。 当完成与登月舱分离后,小卫星将会对月球表面进行X 射线和红外线遥感采样绘制地图,从不同的角度拍摄图片并依此即可建立月球表面地图的三维模型。 待已着陆的集群各个功能舱拍摄或提取撞击过程的准备程序结束,小卫星达到远月点时实施反向机动,使得撞击地点部署在摄像机以及相关探测仪器的可视且安全范围内,并使用X 射线分光镜对月尘组成、月表下物质等进行分析,并为未来的月面软着陆进行技术积累。
2.2 飞行器模块间通讯
要使得各个模块都能有效工作,协同进行复杂的月面任务,各模块舱段间必须具有有效的通信系统。 各模块舱段通过通信链路互相联在一起,形成一个月面通信网络,该网络以各舱段作为交换结点。 本文模块链路主要采用无线微波通信链路和激光通信链路相结合的方式。 星月地通讯链路如图4 所示。

图4 星月地通讯链路Fig.4 Satellite communication link
各模块完成在轨分离完成后,在空中形成着陆构型,主要采用模块间微波无线通信。 微波通信作为传统的通信方式,在各模块在空中运动时,能够具有较高的可靠性。 当载人登月着陆集群全部安全着陆后,各模块主要采用空间激光链路。激光通讯适用于各模块没有相对运动的月球表面,传输介质是激光,利用集群模块之间的光通信链路进行数据传输[6]。
3 飞行程序设计
3.1 模块分离
登月飞船脱离奔月轨道后,进入环月轨道。 环月轨道高度为300 km,环绕速度为1.551 km/s,按近月点和远月点等效双脉冲制动估算,各着陆舱段所需的制动ΔV预算均为(0.123 +1.745)≈1.868 km/s,需要根据各自的分离和着陆时序进行分配。 飞行器月面着陆与上升的任务剖面设计如图5:①航天员进入登月舱后,指令服务舱下达登月着陆指令,各个模块依次开始在轨分离;②首先通讯舱打开爆炸螺栓,与登月舱分离,进入制动阶段,通讯舱小发动机处于最大推力状态,以实现减速,降低轨道高度;③待通讯舱分离完成,探测舱、能源舱、仪器舱和后勤舱依次间隔几十秒,以和通讯舱相同的方式进行在轨分离。

图5 飞行器月面着陆与上升过程示意图Fig.5 Schematic diagram of landing and ascent process of the lunar vehicle
3.2 登月舱着陆
所有模块释放完成后,登月舱与指令服务舱分离。 由于登月舱载有航天员,因此其着陆等级为所有模块中最高。 参考阿波罗及星座计划飞行方案[7],并考虑各模块重构问题,登月舱下降及着陆可以划分为6 个阶段:主制动段、重构段、姿态调整段、接近段、悬停段和垂直下降段,各阶段推力状态及目标如表1 所示。
登月舱以及各模块在环月轨道与指令服务舱分离后,着陆发动机反向制动进行下降着陆,具体设计如下:①采用Astrogator@STK 模块中有限常推力和比冲模型,压力方式取Pressure-Regulated、推力效率为0.1;②类似霍曼转移方式,登月舱在半轨内完成又300 km 到10 km 的下降;即经过49 min 后实现下降;③达到10 km 后软着陆系统(包括对月姿态调整、对月测距雷达等)启动,在10 min 内完成月面着陆。
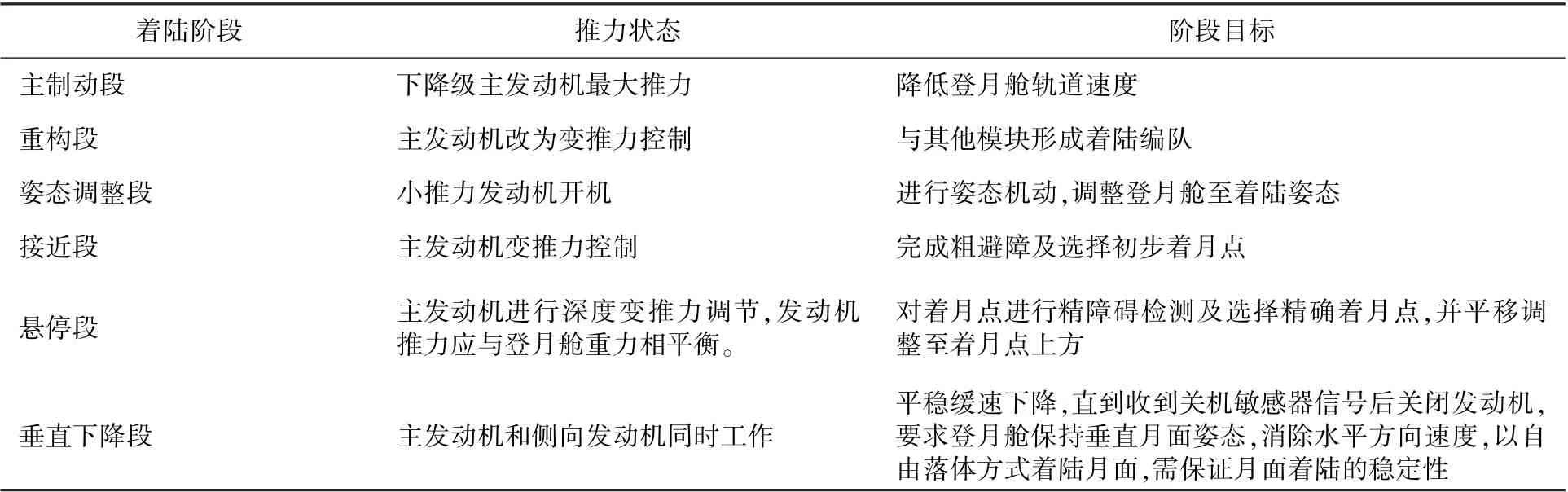
表1 登月舱下降及着陆阶段Table 1 Phases of lunar module descent and landing
载人登月月面系统落月点主要根据任务需要确定。 由于月面系统可借助中继卫星实现与地面的通讯,因此着陆点可以突破以往限制,选择在月球背面着陆。
3.3 撞月试验
在登月舱以及各模块功能舱着陆过程中,可以释放用于月面碰撞的试验小卫星。 在下降平台的18 min 时分离出小卫星,则小卫星恰巧保持在近月点为零或略高于零(本文取近月距10 km 作为停泊轨道)的椭圆轨道,分离点即为椭圆轨道的远月点。 待小卫星飞行3 圈月面观测舱仪器准备就绪,约6 个小时后,集群下降平台部署完毕,可以实施小卫星的撞击机动。 由于小卫星等待时间较短,可以采用自旋式姿态控制方式。
待已着陆的集群组件拍摄或提取撞击过程的准备程序结束,小卫星达到远月点时实施反向机动(轨控量ΔV约为15 m/s),使得撞击地点部署在下降平台的可视且安全范围内(由于升交点赤经和月球自转,3 轨道圈后撞击地点将偏离登月舱着陆地点63 km;这是迄今为止观测月面撞击最近的距离,且同样位于月面观测)。 月面撞击观测实验如图6 所示。
3.4 编队重构
下降平台分离时刻的几何形状决定了参与集群的初始构型,但该构型可能不是最终的着陆构型,因此当各功能模块依次与指令服务舱分离后,需要通过携带的发动机进行编队重构,形成着陆所需构型。

图6 月面撞击观测实验示意图Fig.6 Lunar impact observation experiment
月面着陆构型是以能源舱为中心的近似五边形构型,如图7 所示。 能源舱位于构型中间是由于各舱段所携带燃料只用于月面着陆,能源舱须通过无线供电的方式为各个舱段提供执行月面任务时的能量供给。 紧邻乘员舱的是通讯舱与仪器舱,通讯舱由于需要传输实时数据并与指令服务舱保持通讯,因此位于乘员舱一侧,仪器舱与乘员舱相对距离较近有利于缩短航天员进行月面出舱作业的距离。 相对利用频率较少的后勤舱以及具有自动行动能力的探测舱则距离乘员舱较远。
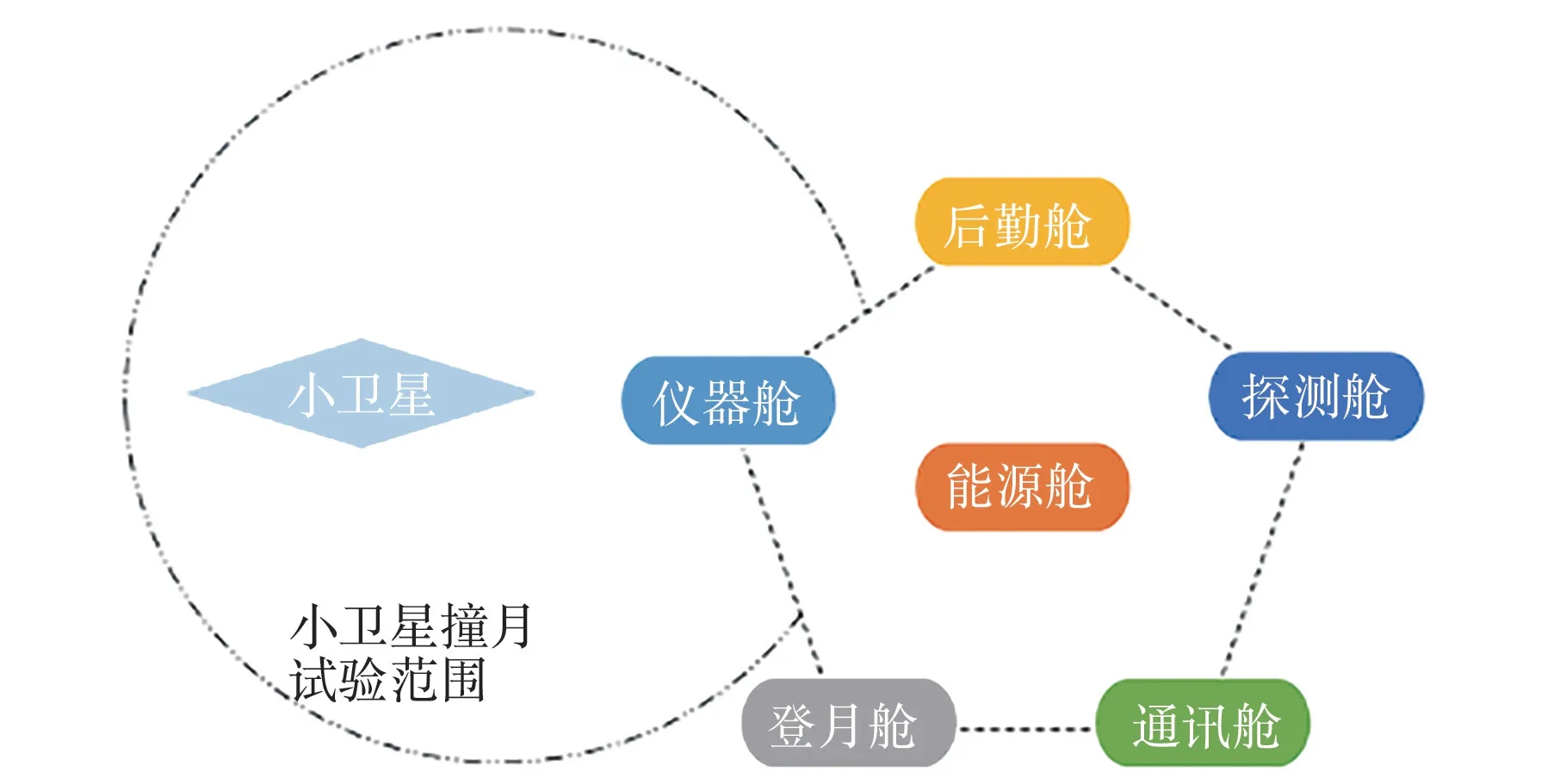
图7 集群编队着陆构型Fig.7 Formation configuration for landing
下降平台分离时刻的分离几何决定了参与集群的初始构型,但该构型可能不是最终的着陆构型,需要各舱段完成各自不同着陆方式的期间,还需在20~40 min 的着陆过程内完成构型重构。 重构要求主要包括以下几点:
1)重构路径规划:针对能源舱的着陆方式和发动机配置,采用庞特里亚金极大值原理优化最省燃料的着陆轨迹;为了最大限度地降低重构难度,其余各集群成员在下降初期(例如前1/3)即完成构型拓扑重组;在随后的2/3 时间内,完成相对构型的精细化调整,过程如图8 所示。

图8 重构路径规划示意图Fig.8 Diagram of reconfiguration path planning
2)重构控制执行:对于载人任务的登月舱和上升舱段,安装包括1 台用来反月球引力的垂直向下火箭发动机和前后左右各4 台用来相对位置调整的游机;对于其余集群成员,只需安装1 台主推力发动机,在下降过程中可通过姿态调整将主推力分解为期望矢量方向;
3)构型重构的智能控制:以各成员舱段以维持一定精度的相对构型为原则,而相对于标称着陆点的绝对位置精度作为弱约束,引入具有分等级网络拓扑结构自组织方式的智能控制算法。
4)相对构型的测绘:各组成集群间在建立无线电/激光通讯同时,可基于载波相位等技术得到相对距离信息。
编队构型重构拟采用双脉冲变轨方式完成:由于重构周期较短,各舱段轨道引力差的累积效应较弱,则各舱段主要依靠侧向游机(或姿态微调下的主发动机分量)提供控制实现;根据近地编队任务的重构经验,各重构舱段携带速度增量ΔV=40 m/s 的燃料,即可满足任意构型的重构要求。
采用编队分散着陆,存在碰撞风险。 因此,在计算各模块碰撞概率时,假定相遇时间很短,相对运动近似为线性。 各模块之间的相对状态误差用高斯分布描述,分布参数由各模块相对测量误差得到。 通过递推编队初始状态协方差矩阵,将碰撞概率密度函数在包含模块舱段区域积分,得到碰撞概率。 基于高斯摄动方程,沿航迹方向施加速度增量,使其保持相对安全距离,从而实现碰撞规避。
3.5 着陆方式
目前月面着陆的主要方式有气囊缓冲着陆机械式软着陆机构等,本文各模块根据不同着陆等级采取不同的着陆方式。
气囊缓冲着陆结构较为简单,质量较轻,几乎没有额外的能量消耗,但着陆过程中舱体仍会受到相对较大的冲击,着陆地点不能精准控制[8]。而机械式软着陆机构高刚性、高可靠性、轻质量,能够保证登月舱内部结构及航天员不因受月面冲击过大而受到损伤[9]。 但其技术和成本要求较高,适用于登月舱、仪器舱等对于着陆姿态和稳定性要求的舱段。
本文中各个舱段对于着陆要求有不同的需求,例如登月舱作为着陆等级最高一级的舱段,采用机械式软着陆机构,以满足航天员对于月面软着陆的承受能力。 后勤舱无重要精密仪器,着陆位置和姿态的准度要求较低,也允许承受较大冲击,因此使用气囊缓冲装置着陆。 据此可得各舱段着陆要求及方式如表2。

表2 载人登月飞行器着陆方式Table 2 Landing methods of the manned lunar vehicle
月面着陆的航天员、月球车、支持设备、燃料补给等对着陆过程的力和热学环境要求各不一样,根据着陆等级配置不同的着陆缓冲机构,可避免传统的载人着陆系统由于采用唯一的着陆缓冲机构所造成的浪费。 此外,对于登月舱来说,各功能模块的分散化,可以使登月舱上升段进行月面上升时,将仪器实验舱、探测舱等留在月球表面,其上升质量会小于传统整体着陆时的质量,结构机构部分尺寸减小,使得整体更加轻便,能够利用更少的燃料和氧化剂就可达到下降反冲减速和上升级发射入轨。 同时,集群式分散着陆可以满足持续时间更长的任务需要,构建月球基地初步雏形。
4 上升方案
本文设计的月面着陆集群,由于已将各个功能舱段进行单独划分,并进行分散着陆,因此在月面上升时只需启动登月舱的上升段发动机,将乘员舱送入月面等待轨道,与指令服务舱进行对接。 相较于传统登月舱的载人月面起飞过程,本文设计的上升段载荷更小,质量更轻,有利于进行月面上升控制以及燃料合理消耗。 载人月面起飞过程可以划分为3 个飞行阶段:垂直起飞段、姿态调整段和射入段,各阶段推力状态及目标如表3 所示。

表3 登月舱上升各阶段Table 3 Phases of lunar module ascent process
为了实现月面起飞、返回以及与指令舱的最终交会,上升段舱需要安装推力较大的火箭发动机。 不同于传统登月舱上升级推挤系统,本文采用电动泵火箭实现上升段起飞。 对于采用火箭发动机相同重量的上升段舱,电动泵将比燃气泵将具有更大的运送重量,且具备良好的可靠性将更适于月面起飞的中小型上升段舱返回。 登月上升返回机动时除了克服1.868 km/s 速度增量用于轨道高度抬升,还需要额外增量用来克服由于月球自公转以及指令舱轨道面的摄动带来的轨道面修正。
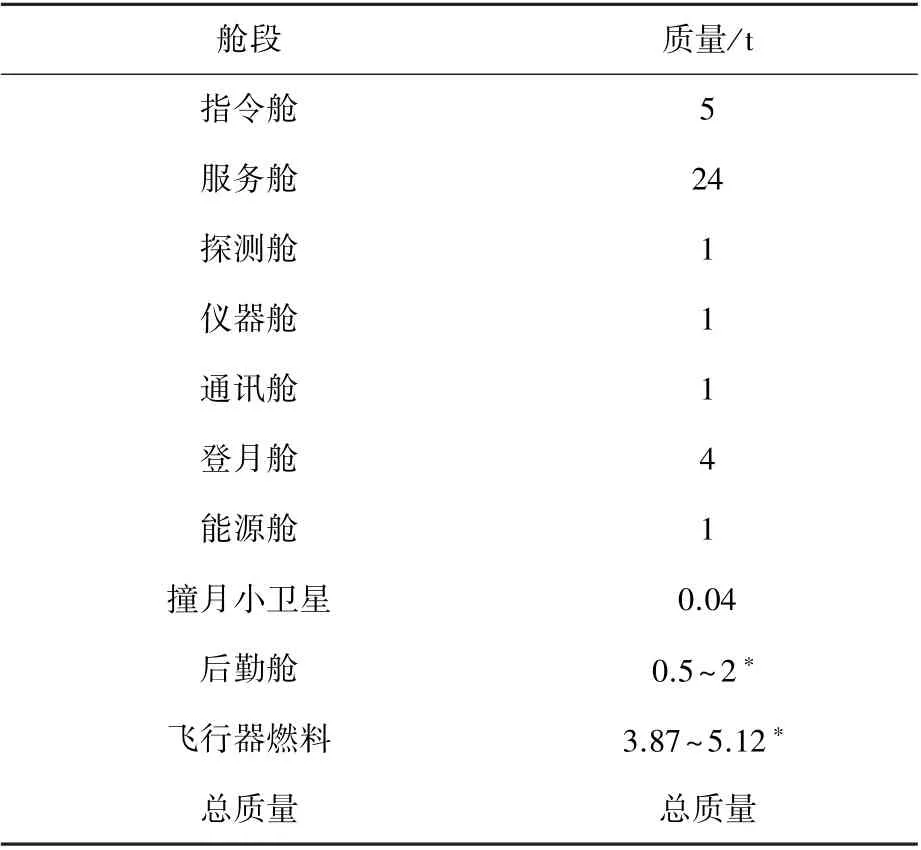
表4 飞行器整体质量分配Table 4 Overall mass distribution of the lunar vehicle
5 质量预算与补给方案
5.1 质量预算
飞行器整体质量主要包括各个舱段的干重、后勤舱所携带燃料、氧气、食物等重量以及进行下降和上升时各个舱段所需速度增量的燃料重量。飞行器整体质量参考嫦娥三号、神舟飞船以及阿波罗飞船,具体分配如表4 所示,其中后勤舱和飞行器所携带燃料质量由任务时间决定。
根据给出的轨道速度与速度增量,可计算出不同任务周期下各个舱段所需燃料质量。 其中登月舱需计算下降、编队重构以及上升过程三个过程的速度增量;其他舱段只需计算下降和重构两个过程,总速度增量为1.868(下降)+0.04(重构)=1.908 km/s。 撞月小卫星质量很小,因此其消耗燃料质量可忽略不计。 月面系统下降、着陆、上升过程中,各舱段速度增量以及所需燃料如表5。
5.2 补给方案
登月系统模块化设计可根据任务需求,通过后勤舱供给、指令服务舱抛投或空间站补给等多种方法,实现任务时间的机动可调性,满足不同任务需要。 不同任务时间,登月系统运行情况如表6 所示。

表5 各舱段速度增量以及所需燃料Table 5 Speed increase for each segment and the fuels required

表6 登月系统补给方案Table 6 Resupply program for Lunar landing system
6 结论
本为提出的一种新型的集群化多功能载人月面着陆/上升器方案设想,为未来中国载人月球探测器提供了一种新思路。 经分析,本方案能够通过模块化,整体质量控制在45 t 以内,且可以根据任务周期灵活调整携带燃料和补给质量,降低发射成本;各模块舱段根据其载荷着陆要求的不同,采用不同等级着陆方式,以达到各自的振动、冲击等舒适度要求,降低成本,且具有低风险、高生存能力的特性。 在下降期间,登月舱释放一颗小卫星用于进行月面撞击实验,有望实现迄今为止最近距离的月面撞击观测,以及首次月面上长时间的撞击观测。
多模块系统设计可以提高适应性,降低发射难度,利用不同方式完成发射目标。 除了利用重型火箭将各个舱段一起送入登月轨道外,未来我国可能采取空间站的技术路线,通过将空间站作为载人登月中转站来降低登月的技术难度和成本。 本项目提出的集群化多功能飞行器可依次将各个功能舱段发射至空间站,待指令服务舱乘载航天员抵达空间站后,各模块在空间站进行组合,再离开空间站进入登月轨道。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:52
军事文摘(2022年14期)2022-08-26 08:15:54
智慧少年·故事叮当(2021年3期)2021-06-29 00:53:13
军事文摘(2019年18期)2019-09-25 08:09:00
制造技术与机床(2019年4期)2019-04-04 12:21:26
科学与财富(2019年3期)2019-02-28 07:33:42
太空探索(2018年7期)2018-07-05 10:34:16
航空知识(2017年11期)2018-04-16 05:29:56
电源技术(2015年2期)2015-08-22 11:28:02
军事文摘·科学少年(2014年3期)2014-04-29 00:44:03