
一种临近空间太阳能无人机自主故障诊断及应急处理策略*
2020-07-01 05:44蒙文跃杨延平户艳鹏马晓平
航天控制 2020年2期
蒙文跃 杨延平 温 阳 户艳鹏,2 马晓平
1.中国科学院工程热物理研究所,北京100190 2.北京航空航天大学 航空科学与工程学院,北京100191
0 引言
高空长航时太阳能无人机依靠机翼上铺设的大面积太阳能电池板,转换太阳能作为能量来源,具有飞行高度高、留空时间长、作业范围广、可重复使用等特点,可执行应急信息保障、战区预警、通讯中继、侦查监视等军事任务以及大气研究、灾害监测、互联网服务等民用任务[1]。美国和英国研发太阳能无人机较早,我国从20世纪90年代起,北京航空航天大学、西北工业大学等高校开始了对太阳能无人机的研究,直至今日,中国航天科技集团、中国科学院、中国航空工业集团等多家单位均在大力开展太阳能无人机平台的研发。当前,自主化和智能化作为无人系统的重要发展方向成为学术和工程领域研究的热点和难点。
自主化和智能化高度依赖于飞行控制系统,飞控系统作为无人飞行器的控制核心,其可靠性对无人机至关重要,而飞控计算机的故障检测诊断及应急处理是飞控系统可靠性的重要组成部分。现有关于飞行器故障检测及应急处理研究中,集中在特定类型无人机的具体设备研究,如系统性设计了针对飞控系统软硬件的故障检测[2-3];分析了自主控制技术及飞控系统故障诊断专家知识库结构组成[4-5];针对高速飞行无人机,提出了一种基于决策网络进行飞行器异常事件诊断的系统[6],采用Petri net矩阵推理构建飞行器异常事件诊断依据。总结了深度学习在故障诊断领域中研究现状,描述了基于4种深度学习模型的故障诊断思路[7]。研究了某型无人机的故障重构技术[8-9],特别是故障诊断与容错控制策略。上述研究均是针对故障诊断具体机构进行的单方面检测设计,目前为止,关于高空太阳能无人机类型的飞控系统自主故障诊断及应急处理策略方面,系统的研究相对较少,也少有资料可供参考,这是因为:首先,高空长航时太阳能无人机通常具有大展弦比、气弹形变、低速飞行等特点,需要针对特性制定故障诊断标准;其次,太阳能无人机设备类型庞大复杂,包含多种类型传感器和执行机构,研发成本和难度高[10];此外,无人飞行器空中计算和通信能力有限,难以实时完成大规模复杂运算的地空信息交互[11-12],需要研究飞行任务中的自主决策逻辑。

图1 临近空间球载太阳能无人机[13]
基于上述分析,针对高空长航时类太阳能无人机,见图1[13],本文分析并设计了一种有效的故障诊断策略及应急处理逻辑,相比现有研究,具有以下特点:
1)结合太阳能无人机低速飞行和大升阻比等特点,应急处理策略更侧重于顶层规划,适用于太阳能无人机验证飞行试验阶段,是一种平台和系统级的故障诊断和应急处理策略,部分填补了太阳能无人机平台级故障应对策略的空白;
2)所设计故障诊断策略能够实现飞行过程中自主判定单机故障或飞行异常,并根据故障类型执行相应的应急处理方法,现有的基于专家知识库的无人机故障诊断系统多适用于无人机起飞前的地面检测和维护阶段[14-15],与之不同,本策略提高了无人机在飞行任务中的自主决策能力,体现了无人机智能化的理念,是增强飞行安全的重要举措;
3)本文设计的自主故障诊断策略涉及传感器、执行机构、动力系统、电源控制设备、测控数据链、飞控计算机以及飞控精度、稳定性,几乎涵盖了无人机上的所有航电设备及飞行状态的状态监测和相关故障诊断,设计更加全面,具有实际应用参考价值。
1 故障诊断逻辑建模
太阳能无人机在故障类型和处理策略上较传统无人机的应急处理策略均有较大差别,是一种新型的适用于太阳能无人机系统的自主故障诊断及应急处理。本文设计的逻辑策略与方法,是面向自主化设计的实时智能故障诊断及处理,其中,逻辑建模是研究故障诊断的一个关键步骤,通过图2中的处理逻辑实现,包括以下步骤:
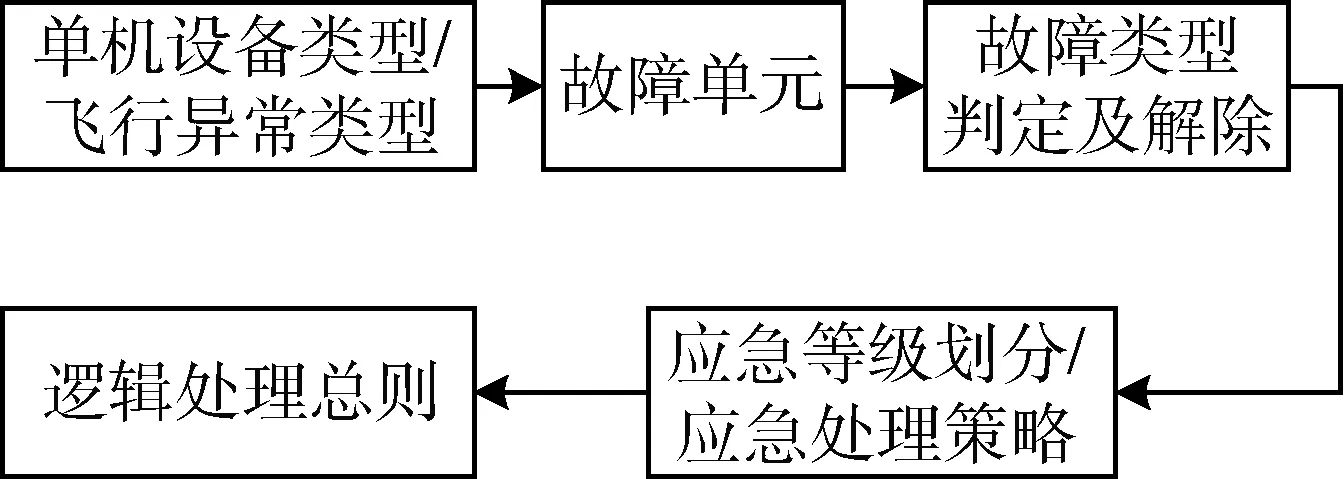
图2 故障诊断及应急处理诊断逻辑
1)确定太阳能无人机上的单机设备类型,确定单机故障单元;
2)统计除单机设备故障以外的其他异常情况,确定其他故障单元;
3)对每种故障单元划分故障类型,确定故障判定及解除判定方法;
4)根据故障对无人机平台的影响程度,划分应急等级及相应等级下的应急处理策略;
5)给每种故障单元对应的故障类型确定应急等级及应急处理策略;
6)确定应急判断及逻辑处理总则。
2 自主故障诊断方案设计
自主故障诊断及应急处理方案设计依据图3完成,重点分为故障单元确定、故障类型划分及故障/解除判定方法、应急等级及处理策略3大部分。

图3 逻辑处理方案流程图
2.1 故障单元确定
故障单元确定需要依据太阳能无人机整机设备情况具体分析。
太阳能无人机上的航电设备主要分为传感器类、执行机构类、动力系统、能源系统、测控与信息传输系统、飞控计算机、照明系统、回收系统以及任务载荷等。任何一类单机设备出现故障都将影响到无人机任务的执行,甚至威胁无人机自身的飞行安全。在此根据太阳能无人机上的设备状态,可提取直接影响无人机飞行安全的关键重要单机设备作为重点的故障监测单元,见表1。通过对关键故障单元的工作状态进行监测,判定各单元是否工作正常。
除对机上单机设备的工作状态进行监测外,还应关注太阳能无人机的飞行状态是否正常,如是否在沿预定的航线飞行、飞行速度与给定速度是否一致、无人机的飞行姿态是否正常等。相应故障单元可以归纳为飞控精度和无人机稳定性,详见表1。
2.2 故障类型的判定和解除
对于单机类型故障,当单机能够输出自身工作状态标志时,则根据工作状态标志判定单机是否故障,当无相关工作状态标志输出时,则通过监测其有效数据输出是否正常来判定故障,如数据帧中断,则认定为通信故障。表2列出了部分故障类型的判定方法:
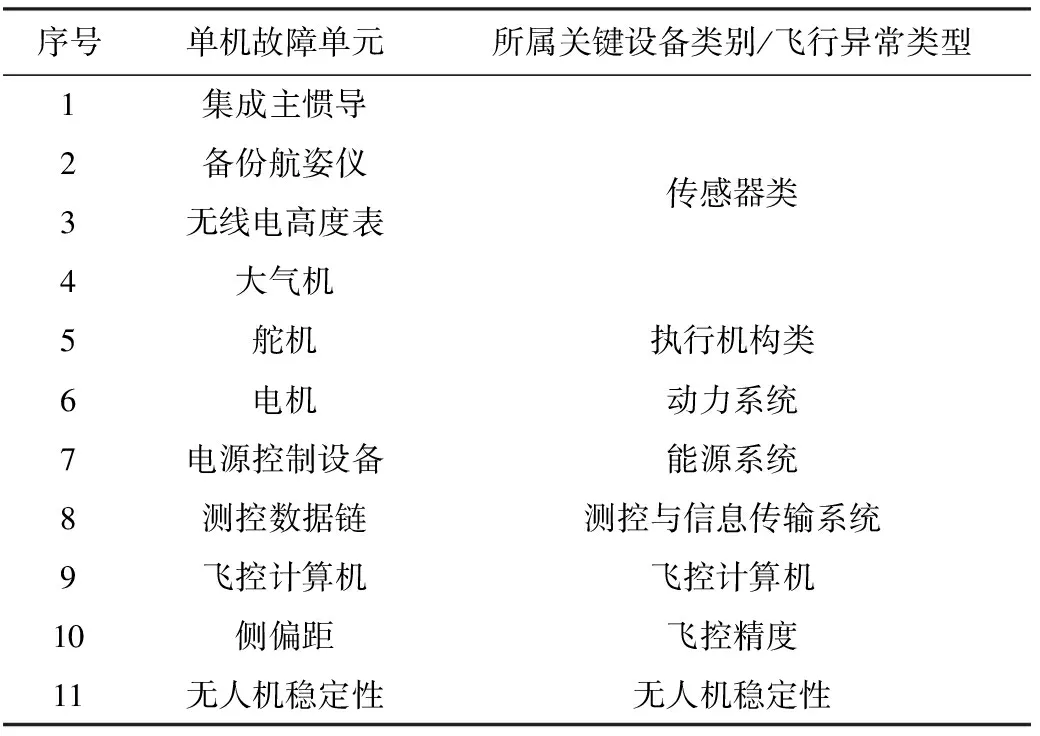
表1 关键设备与故障单元划分表

表2 部分故障类型判定及解除方法
故障判定的进入及解除应根据飞行阶段、单机通信周期的不同设定合适的帧次或时间门限,遵循“严进严出”原则,避免故障状态频繁切换。
2.3 应急等级及处理策略
根据故障对无人机平台的影响程度划分应急等级及相应等级下的应急处理策略。具体地,按照故障严重程度的不同,可将各故障类型划分为I、II、III应急等级,详见表3。
I级应急:严重影响无人机安全的故障;处理策略以最大程度保护无人机及机上设备,为直接开伞或给固定舵偏执行飘落。
II级应急:影响无人机任务执行效果或可能影响无人机安全的故障;处理策略为加大着陆窗口,进回收航线着陆。
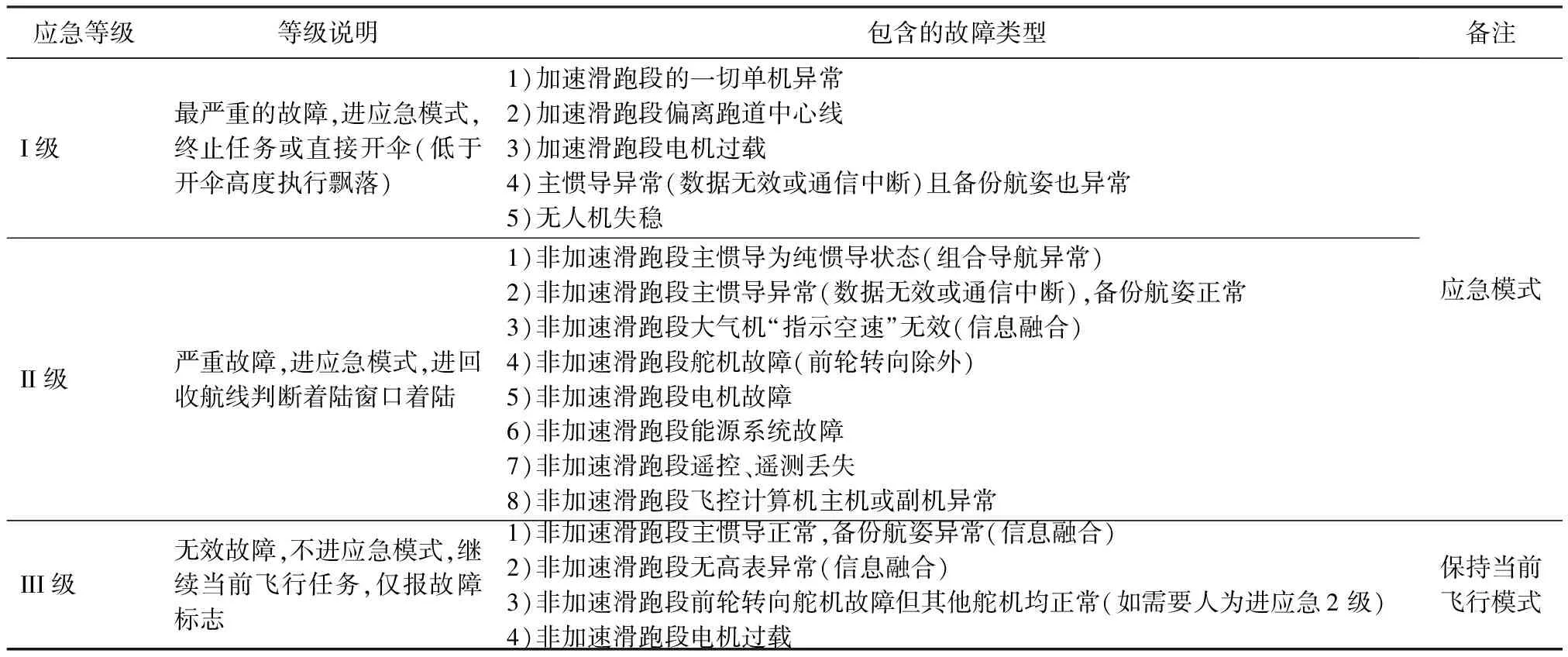
表3 故障判断及应急策略
III级应急:不影响无人机飞行任务的故障;处理策略为仅给出故障告警,地面操作人员根据故障标志获知故障类型,并决策是否采取干预措施。
在此基础上,结合故障类型及其发生时无人机所处的飞行阶段,给不同的故障类型确定应急等级和应急处理策略。
具体地,对于在加速滑跑阶段即发生的故障,应及时采取措施终止起飞,因此应归入I级应急等级,应急处理策略为终止起飞;对于空中飞行段,诸如主、备惯导均失效和无人机失稳等严重影响无人机安全的故障,也应归入I级应急等级,当无人机高度大于开伞高度时开伞,否则执行飘落。
在非加速滑跑段,对于主惯导组合导航异常、主惯导导航数据无效但备份航姿仪正常,大气机、舵机、电机、能源系统、测控数据链、飞控计算机等一般严重故障,则归为II级应急,故障发生时应加大着陆窗口,使无人机进入回收航线,执行回收操作。
而对于非加速滑跑段的备份航姿异常但主惯导正常、无高表异常、前轮转向舵机故障但其他舵机均正常、电机过载等,则只需要报故障标志,仍继续当前飞行任务,此为III级应急。
3 应急判断及逻辑处理原则
实际飞行过程中,可能涉及多故障并发而需要进行应急等级转换的情况。例如无人机上同时发生多种故障,而各故障的应急等级和应急处理措施相应不同,应以哪个为准;再例如无人机先判断发生了一种故障,一段时间后故障消失,此时应急等级及应急处理措施是否需要更新;以及当操作人员通过地面站手动发送应急命令时,无人机响应命令应转入几级应急处理策略等等。为此应制定总体原则,使得上述情况下的应急等级转换确定有序,避免在多故障并发时出现逻辑时序的混乱。
针对上述问题,本文制定应急判断及逻辑处理应遵循的总体原则,具体如下:
1)当有多种故障同时发生时,按最高级别应急处理;
2)自主故障诊断及应急处理系统可根据故障类型的变化执行应急等级升级,但不能执行应急等级降级,当判定故障解除时,仅清除相应的故障标志,不改当前的应急等级及处理逻辑;
3)通过地面站发命令手动进应急模式时,默认进入II级应急。
4 自主故障诊断及应急处理仿真验证
依据上述策略设计半实物仿真验证平台(图4)。将表1中列出的惯导、舵机、飞控计算机、测控数据链接入半实物仿真系统,无法参与仿真的无线电高度表、大气机、动力系统、能源系统均在仿真计算机中以数学模型进行模拟,并按真实的数据传输协议经测试电缆与飞控计算机通讯。运行该闭环仿真系统,并在仿真过程中针对特定设备人为引入故障,测试自主故障诊断系统逻辑判断及飞控模式转换的正确性。
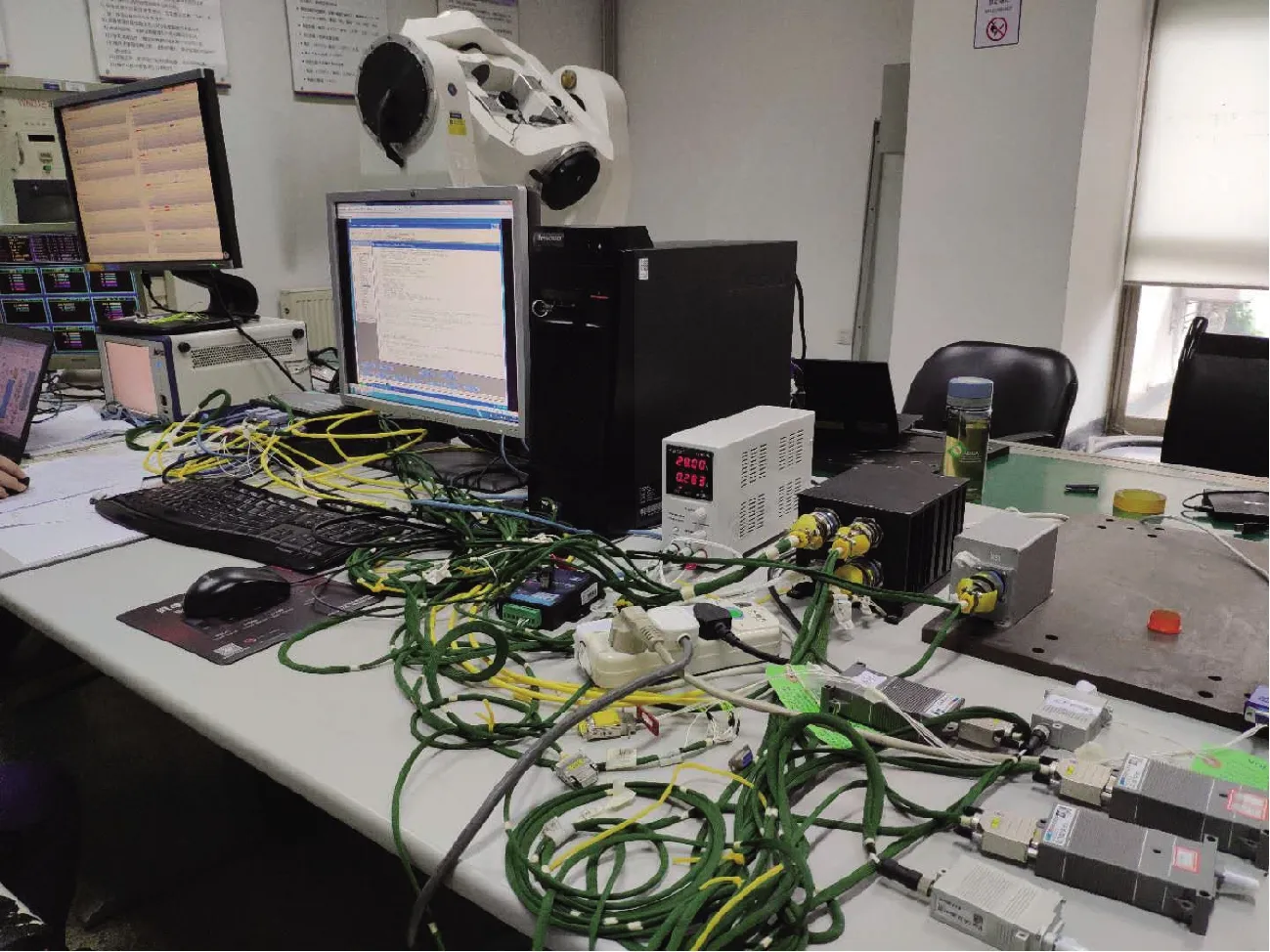
图4 半实物仿真验证平台
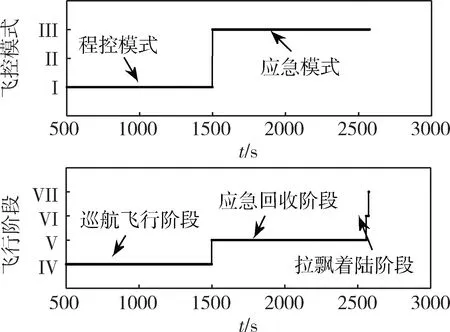
图5 飞行状态自主切换模拟仿真
仿真过程中,在1500s程控模式下的巡航阶段,人为断开数据链路,制造遥测丢失故障,根据应急处理策略,飞控模式切换为应急模式(II级应急等级)并进入应急回收阶段,之后自主拉飘着陆,飞行状态自主切换仿真结果见图5。
5 结论
高空长航时太阳能无人机具有大展弦比、高空低速、大升阻比、设备繁多复杂等特点,对应的飞控系统的故障诊断和应急处理设计十分重要,可有效提高飞控系统的可靠性。本文提出一种适用于太阳能无人机的自主故障诊断及应急处理策略,基于实际全机设备,从平台级故障层面实施顶层规划设计,提高了无人机在飞行任务中的自主决策能力,此外,所设计逻辑策略实施灵活,即可作为飞控内嵌代码,也可作为独立软件模块被机载软件调用,无需增加硬件成本,具有实际参考意义。
猜你喜欢
法律方法(2022年2期)2022-10-20
中学生百科·大语文(2021年11期)2021-12-05
新疆钢铁(2021年1期)2021-10-14
纺织科学研究(2021年7期)2021-08-14
航天工业管理(2019年11期)2019-04-20
37°女人(2017年11期)2017-11-14
能源(2017年9期)2017-10-18
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
筑路机械与施工机械化(2014年10期)2014-03-01
振动、测试与诊断(2014年5期)2014-03-01
