
高速列车运行姿态测量系统的设计
2020-07-01 08:53杭超,李刚,2,3
上海电气技术 2020年2期
杭 超, 李 刚,2,3
1.兰州交通大学 机电技术研究所 兰州 730070 2.甘肃省物流及运输装备信息化工程技术研究中心 兰州 730070 3.甘肃省物流与运输装备行业技术中心 兰州 730070
1 设计背景
随着运行速度不断提升,车体实现轻量化,在大风环境下,列车的气动特性会发生显著变化,可能产生横风效应[1]。在大风载荷下,高速列车的运行姿态会发生剧烈变化,对于途经大风区域的高速列车,运行安全有更高的要求。检测列车运行姿态,能够为高速列车在大风环境中实现安全运行提供数据支持[2]。技术人员对列车姿态的检测方法进行了研究。文献[3]运用微惯性传感器进行测量,通过信号处理与软件解算来获取列车姿态。文献[4]利用北斗姿态测量技术,对动车组车体进行姿态测量试验。文献[5]提出一种基于线阵电荷耦合器件的姿态测量技术,对高速列车运行姿态进行测量。文献[6]采用数值模拟的方法,通过软件分析得到不同因素对列车气动载荷的影响。笔者设计了一种高速列车运行姿态测量系统,基于蜂舞协议,以微机电系统惯性传感器为测量元件,对高速列车运行姿态实现全面实时监测,为后期制定高速列车在大风环境中的安全运行标准提供数据支持。
2 总体设计
将国内某CRH型八编组高速列车作为研究对象,采用蜂舞协议和通用分组无线业务网络相结合的数据传输方式[7-9],将多个微机电系统惯性传感器作为测量元件,分别安装在每节车的车体上。蜂舞协议网络负责每节车车体运行姿态的采集和传输,基于网关单元将所采集的数据通过通用分组无线业务网络发送至上位机。这一系统采用分层网络拓扑结构,能够分别获取每节车车体的运行姿态数据。高速列车运行姿态测量的整体框图如图1所示,这一系统可以实现高速列车运行姿态的无线监测。

图1 高速列车运行姿态测量系统整体框图
3 车体运行姿态定义
在大风环境中,列车运行时会受到振动、轮轨间作用力和大风的作用力,车体会产生不同的姿态。由于铁道车辆的特殊性,其运行姿态也有特殊的定义,X轴正方向指向列车前进的方向,Y轴正方向垂直于轨道中心线指向钢轨一侧,Z轴垂直于轨道平面;车体绕X轴转动称为侧滚,纵向运动称为伸缩;车体绕Y轴转动称为点头,横向运动称为横摆;车体绕Z轴转动称为摇头,垂向运动称为浮沉。车体运行姿态如图2所示。

图2 车体运行姿态
4 硬件设计
4.1 蜂舞协议网络
蜂舞协议网络负责采集每节车厢运行姿态的数据,由数据采集模块、数据处理模块、无线通信模块和电源模块组成,如图3所示。

图3 蜂舞协议网络结构
数据采集模块中,MPU6050微机电系统惯性传感器体积小,功耗低,性价比高,在低成本测量系统中广泛应用[10]。MPU6050接线如图4所示。

图4 MPU6050接线
MPU6050内部整合集成三轴加速度计和三轴陀螺仪,与多组件方案相比,免除了组合陀螺仪和加速度器时间轴的安装误差,并且体积小,大幅提高了测量精度[11]。MPU6050内部自带的数字运动处理功能能将加速度的分量和陀螺仪的分量融合,直接转换为四元数输出,并直接进行三角运算,将四元数解算为欧拉角,最终得到被测物体的姿态结果。数据采集模块与数据处理模块通过集成电路总线连接,如图5所示。

图5 数据采集模块与数据处理模块接线
无线通信模块和数据处理模块的主控芯片选用CC2530F256,该芯片具有极强的抗干扰性和接收灵敏性,只需极少的外接元件,就能够形成一个蜂舞协议节点,成本低廉。CC2530F256芯片结合领先的射频收发器,内部集成增强型8051微处理器,具备256 kByte闪存空间和8 kByte随机存储器[12]。
MPU6050分布广泛,一般采用电池供电。为了减小节点的体积,选用纽扣电池。纽扣电池电压为3 V,而数据处理模块的工作电压为2.7~3.3 V,数据采集模块的工作电压为3~5 V,为此设计了一个电源供电电路,用于保证数据处理模块与数据采集模块的正常工作,如图6所示。
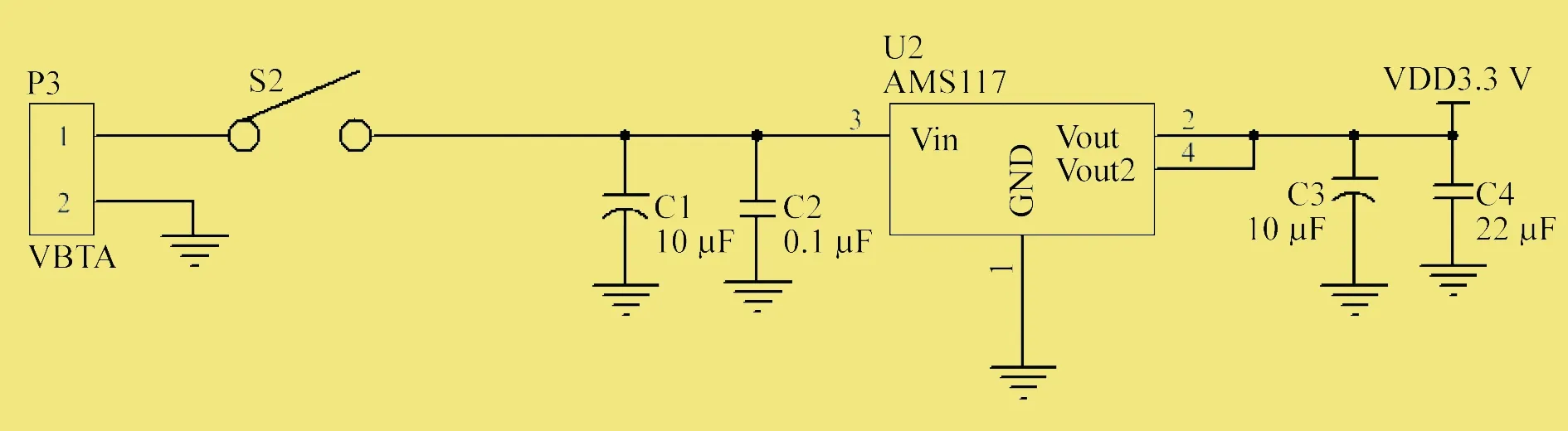
图6 电源供电电路
4.2 网关单元
网关单元负责整个蜂舞协议网络与通用分组无线业务网络之间的数据传输,连接如图7所示。MPU6050采集的数据通过蜂舞协议网络上传至网关单元,经过处理后再发送至通用分组无线业务网络,最终发送至远程上位机。

图7 网关单元连接
网关单元由无线通信模块和数据处理控制模块组成。无线通信模块仍然采用CC2530F256芯片。处理器是数据处理控制模块的核心,由于要处理整个蜂舞协议网络上传的数据,因此要求微处理器具有较大的储存空间和强大的数据处理能力。选用STM32F103RBT6处理器,具有专为高性能要求、低成本、低功耗嵌入式应用设计的ARM Cortex-M3内核[13]。
4.3 通用分组无线业务网络
通用分组无线业务网络采用SIM900A芯片,可以实现低功耗语音、短信和数据等信息的传输,工作频率为850 MHz、900 MHz、1 800 MHz、1 900 MHz,支持1.8 V和3.0 V两种用户识别模块卡,支持传输控制协议、网际协议、用户数据报协议、文件传送协议、超文本传送协议,工作电压在3.2~4.8 V之间。通用分组无线业务网络支持AT指令集,只需要十几条AT指令即可完成对SIM900A芯片的控制和数据远程传输,尺寸结构紧凑,可靠性稳定,性价比高。
5 软件设计
软件设计主要实现数据信号的采集、无线传输和储存,最终将数据上传至上位机。
5.1 惯性传感器
MPU6050微机电系统惯性传感器在工作前都要进行系统初始化,接收到网关单元发出的命令,并反馈至网关单元,加入网络。MPU6050程序设计流程如图8所示。
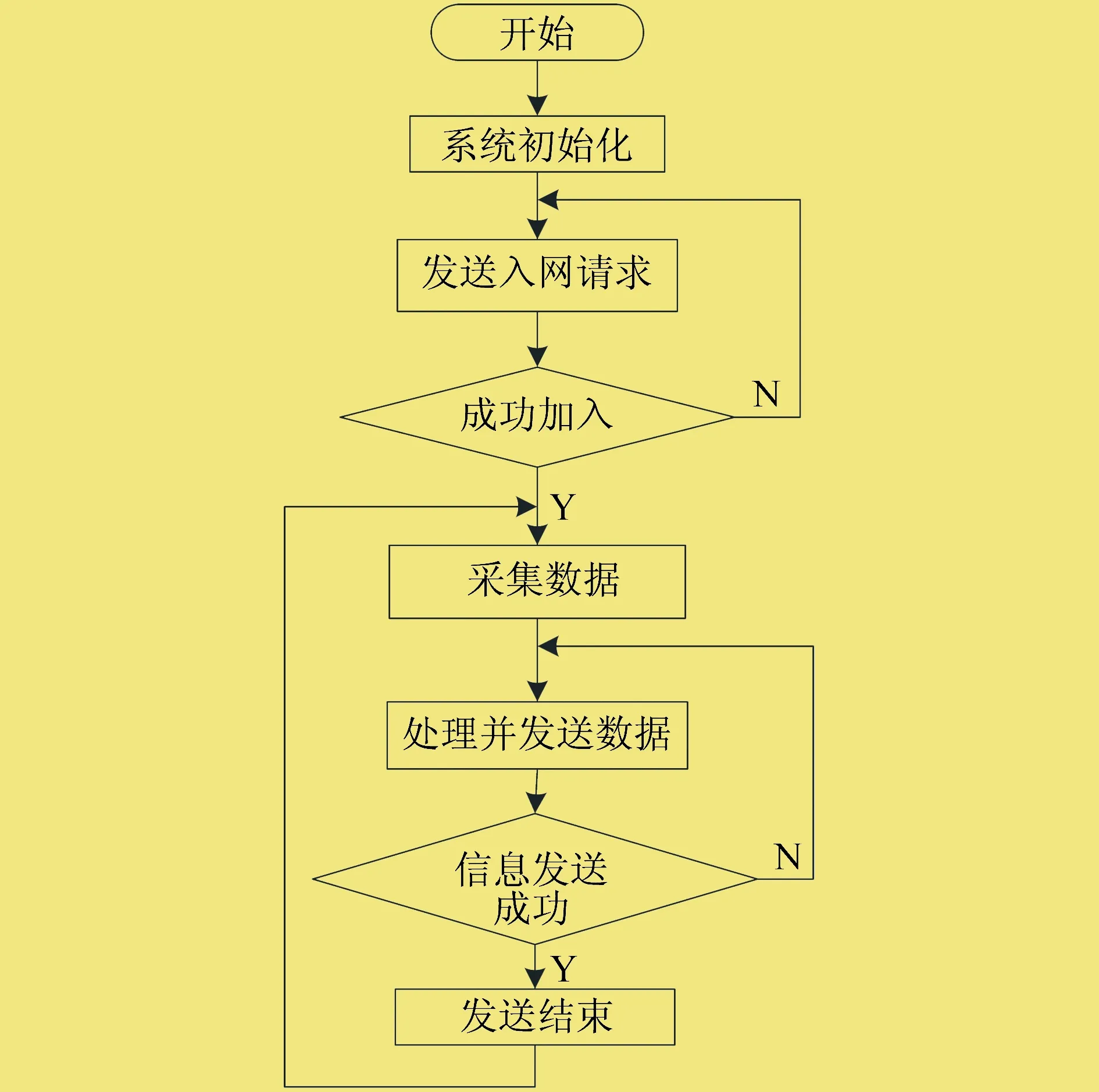
图8 MPU6050程序设计流程
5.2 网关单元
在接收整个蜂舞协议网络数据后,网关单元数据处理控制模块中的STM32F103RBT6处理器对数据进行处理,然后通过通用分组无线业务网络发送至上位机。网关单元程序设计流程如图9所示。
6 功能测试
在完成高速列车运行姿态测量系统硬件搭建和软件程序设计后,对系统进行功能测试。基于实验室现有条件,进行简单模拟测试。测试结果如图10所示,可见这一系统具有良好的动态特性。

图9 网关单元程序设计流程
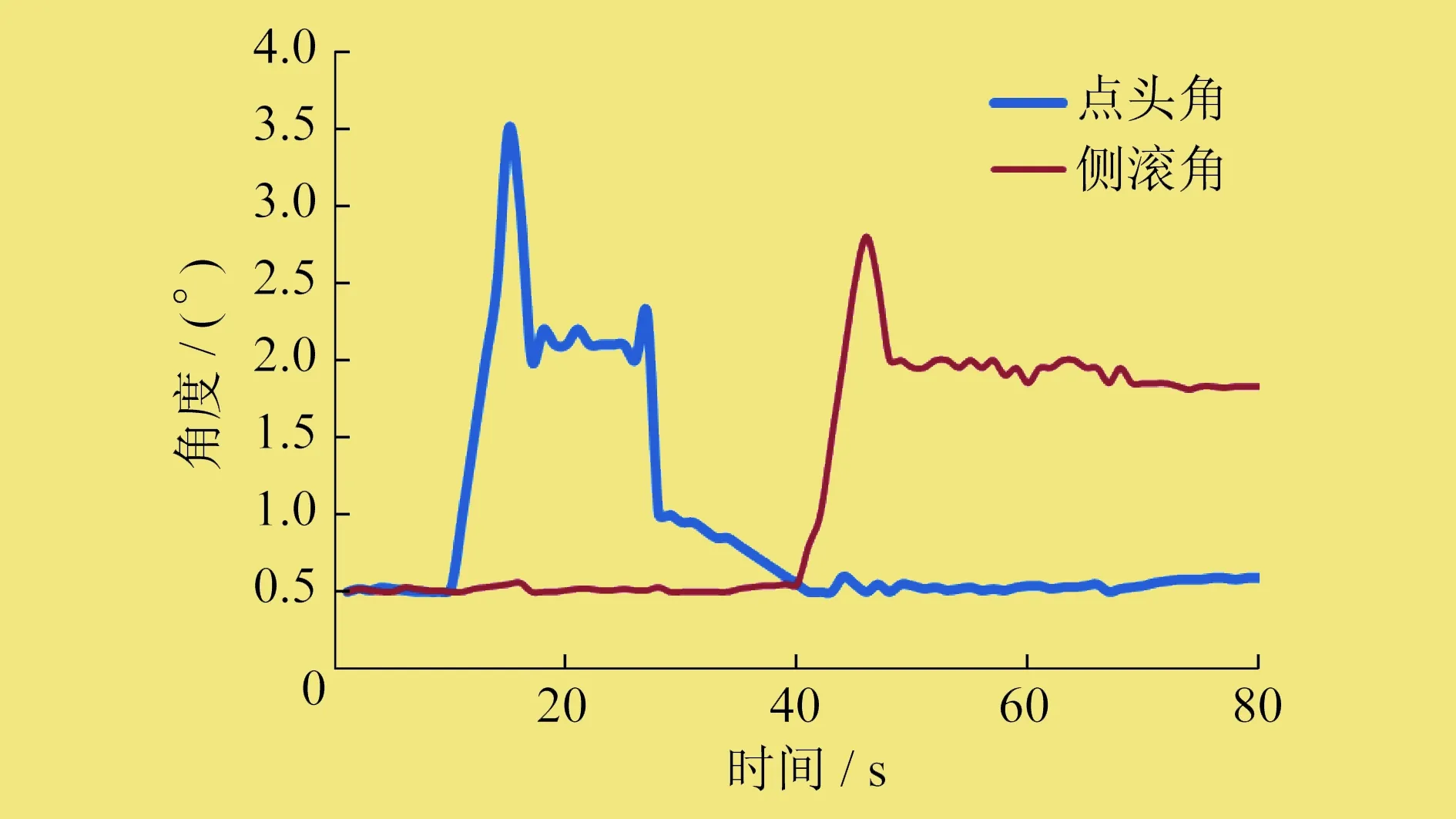
图10 性能测试结果
7 结束语
笔者基于蜂舞协议网络设计了高速列车运行姿态测量系统。这一系统具有抗干扰性强、功耗低、结构紧凑、成本低等特点,能够准确、及时测量出列车姿态的变化,为列车的安全运行提供数据支持。
猜你喜欢
城市轨道交通研究(2022年2期)2022-11-18
计算机应用文摘·触控(2022年6期)2022-04-15
控制与信息技术(2021年2期)2021-07-23
电子制作(2021年4期)2021-06-16
宇航计测技术(2018年3期)2018-09-08
汽车文摘(2017年9期)2017-12-06
新民周刊(2016年20期)2016-05-25
专用汽车(2016年12期)2016-02-11
山东工业技术(2014年20期)2014-10-21
计算机辅助工程(2012年5期)2012-11-21
