
地铁列车制动系统速度信号模拟的研究
2020-06-30 06:57:30张建凯钱雪军
铁路计算机应用 2020年6期
张建凯,钱雪军
(同济大学 电子与信息工程学院,上海 200331)
地铁列车制动系统是确保地铁列车安全运行的关键设备之一。目前,地铁列车广泛采用架控式制动系统,每个架控式制动系统采集2 路速度信号,用于制动系统的控制和提供防滑保护[1]。鉴于制动系统的重要性,需要配备相应的制动测试系统和制动实训系统。这些系统中一般不会安装与实车一致的旋转轮对,无法与实车一样,通过速度传感器监测轮对旋转来获取列车速度信号,为此需要实现速度传感器信号的模拟[2]。国内外对地铁列车制动系统的研究主要集中在制动性能与防滑控制上,对速度传感器输出信号模拟的研究相对较少[3]。
每台转向架需采集2 路速度信号,每节车辆有两个转向架,每节车辆应采集4 路速度信号。本文采用单片机结合电压/电流信号转换的方式,实现地铁列车4 路速度传感器模拟信号输出[4-7],获得高精度的速度模拟信号,有助于提高地铁列车制动测试系统和制动实训系统的可操作性。
1 主控模块设计
1.1 系统方案
地铁列车制动系统速度传感器输出信号模拟系统(简称:系统)通过控制单片机,输出不同频率脉冲,用于模拟地铁列车速度传感器产生的高速脉冲,依据脉冲周期可计算出地铁列车车速[8]。
地铁列车车速的计算公式为:

式中:f为测速脉冲输出频率(脉冲输出周期的倒数);D为地铁列车轮对直径,半磨耗条件下取值为820 mm。
系统采用的芯片型号为STC15W1K16PWM,具有高速、高可靠、低功耗、超强抗干扰等特点;内部集成高精度R/C 时钟,ISP 编程时5 MHz ~35 MHz范围内可调节。此单片机共有8 通道10 bit 高速ADC(转换速度可达30 万次/s),包括6 通道15 位专用高精度PWM 和2 通道CCP(可实现11 bit ~16 bit PWM 输出);单片机工作频率范围为5 MHz ~28 MHz[9]。
速度传感器输出信号的设计要求包括:信号类型为电流矩形脉冲,占空比为30%~70%,轮对每转产生80 个脉冲,高电平14 mA(11 mA ~17.4 mA),低电平7 mA(4.3 mA ~8.9 mA)。
单片机可以接收4 路0 ~5 V 模拟信号和串口信号;先通过4 路专用PWM 输通道输出4 路脉冲电压信号,再将电压信号转换为电流信号,最终输出4路速度模拟信号。系统框图见图1。
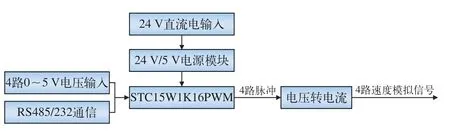
图1 系统框图
1.2 多路脉冲输出
STC15W1K16PWM 单片机内部有一个15 bit PWM 计数器,可供4 路PWM 使用,4 路脉冲的初始电平可以单独设置。波形发生器为4 路PWM,设置有控制波形反转的计数器T1/T2,通过控制T1/T2的反转时间可调节PWM 的占空比;通过将PxM1和PxM0 端口设置为准双向口或推挽输出口,实现PWM 输出的目的。
若取T2 为脉冲周期CYCLE,T1 为CYCLE/2,相应的脉冲波形占空比为50%。设置单片机主时钟频率为12 MHz、12 分频,系统时钟频率为1 MHz。脉冲周期计算公式为:

式中:CYCLE0 为系统时钟周期,CYCLE为脉冲输出周期,P为设定值[PWMCH,PWMCL]。
STC15W1K16PWM 单片机内部PWM 计数器为15 bit,P的取值范围为1 ~32 767。
系统接收ADC 模块的转换结果来控制脉冲周期,其计算公式为:

式中:Vin为0 ~5 V 模拟信号输入,Vcc为基准电压5 V。
设定值P(P′与P值意义相同)的计算公式为:

由式(2)~式(4)可以计算出模拟量输入的脉冲周期。当地铁列车速度为100 km/h 时,计算精度μ为:

由式(5)可知,当地铁列车速度为100 km/h时,计算精度为0.1。地铁列车车速一般低于100 km/h,说明系统使用ADC 转换模块时,精度小于0.1。
1.3 电压信号转电流信号
单片机PWM 输出信号为0 ~5 V。为了满足输出电流范围设定在7 mA ~14 mA 的要求,设计了可将电压信号转换为电流信号的电路。选用AM422-1 芯片,通过配置不同的元器件,可以在大范围内调节输出电流。外部晶体管T1 可降低芯片的功耗,二极管D1 可保护晶体管免受反极性影响。电路原理见图2。
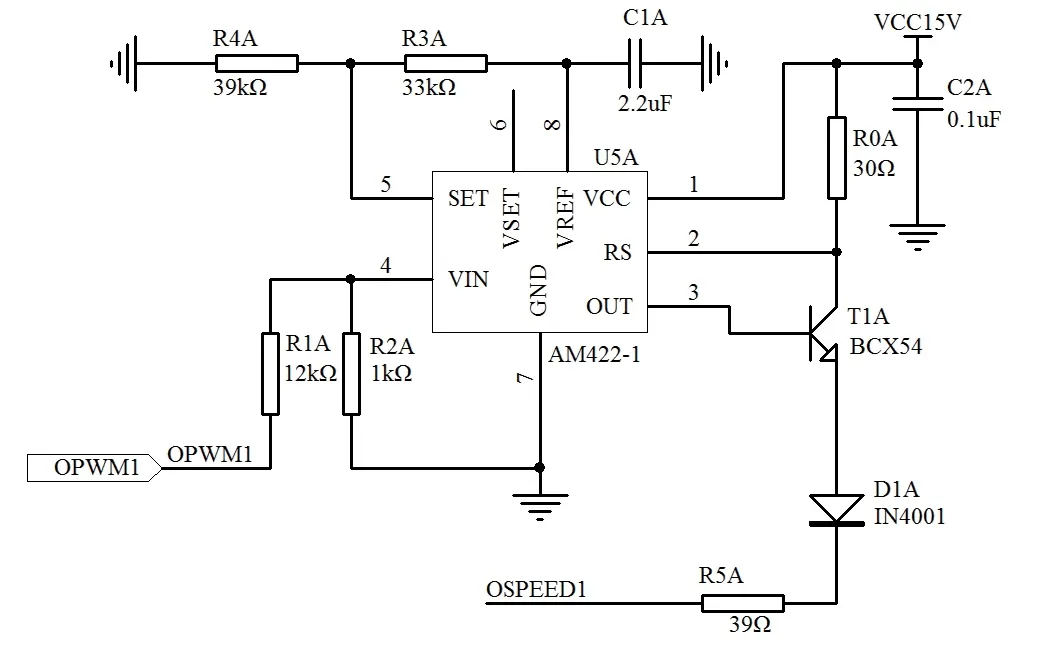
图2 电压信号转电流信号电路原理
采用三线制连接方式,R1、R2的阻值关系为:

输出电流由两部分组成:偏移电流和输入电压导致的电流,计算公式为:

电流ISET用于设置输出电流偏移,计算公式为:

由上式计算,结果为:R0=30Ω,R1=12KΩ,R2=1K Ω,R3=33K Ω,R4=39K Ω,R5=39Ω,C1=2.2μF,C2=0.1μF。
理论计算脉冲输出电流最小值ISET(VIN=0) 为6.944 mA,IOUTMAX(VIN=5)最大值为14.630 mA。
1.4 控制输入
系统速度模拟信号的输入有两种方式:模拟量输入和串口输入。为此,系统具有两种工作模式。
模式1:通过232/485 通讯串口将地铁列车的速度模拟信号实时传送给STC15 单片机。
模式2:来自外部模块的实时电压信号经过STC15 单片机的4 路ADC 转换模块,将0 ~5 V 模拟信号转换为10 bit 数字信号。
为保证模式1 与模式2 能保持一致的输出信号精度,通过串口发送给单片机的速度控制信号的设定值范围为0 ~1 000,可以模拟速度为0 ~100 km/h。
2 单片机程序设计
速度传感器输出模拟信号程序采用KEIL5.0 开发。该程序包括底层、中层和上层;其中,底层为驱动层,完成指定模块的初始化;中层为功能层,通过调用驱动层程序模块来完成特定功能;上层为应用层,通过调用底层程序模块来完成对速度模拟信号的控制。
程序先执行模块的初始化,再判断输入模式(串口通信RS 输入或模拟量AIN 输入)。若输入模式为串口输入,脉冲将接收来自串口的信号;若输入模式为模拟量,脉冲将接收来自模拟量的信号,进行ADC 转换。而后,检测脉冲周期是否超出允许范围,若超出范围则舍弃设置的周期,返回输入模式判断,重新接收数据。若脉冲周期未超出允许范围,则输出脉冲。保持100 ms,再生成下一循环脉冲。程序流程见图3。
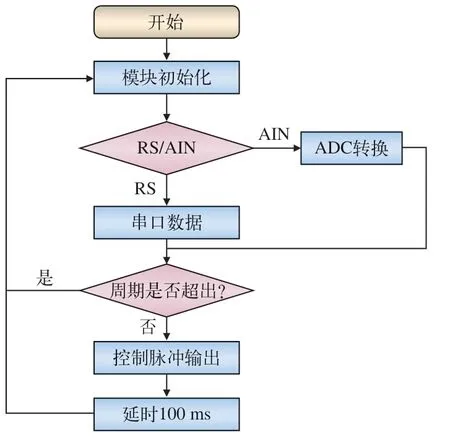
图3 速度传感器输出模拟信号程序流程
3 仿真结果
3.1 测试试验台
测试试验台采用UTD1050DL 型号手持式示波器,选用EDR-120-24 直流电源为PCB 板供电,见图4 所示。
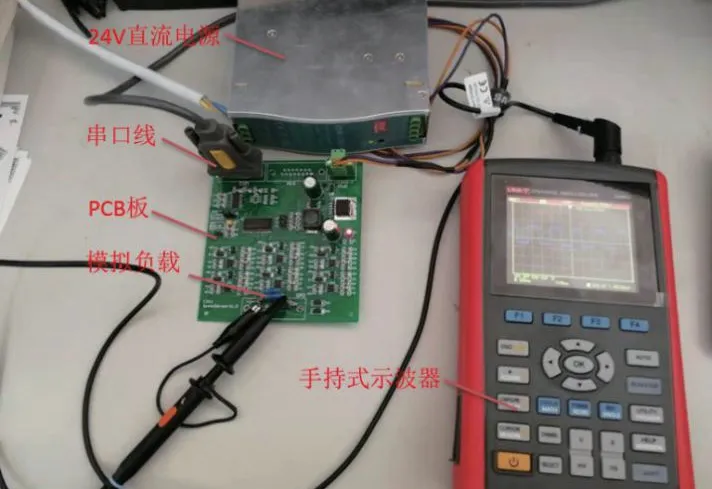
图4 测试试验台
3.2 测试波形
在将电压信号转换为电流信号的输出端连接上模拟负载,使用示波器测试模拟负载两端的脉冲波形。选用250 Ω 电阻模拟负载,通过测量模拟负载的电压值,进而得到电流值。
当速度设定为60 km/h 时,理论频率为518 Hz;测试结果见图5、图6 所示。
从图5、图6 中的数据可知,输出波形为矩形脉冲波,脉冲输出的占空比约为50%;电压最大值为3.760 V,最小值为1.720 V。换算公式为:

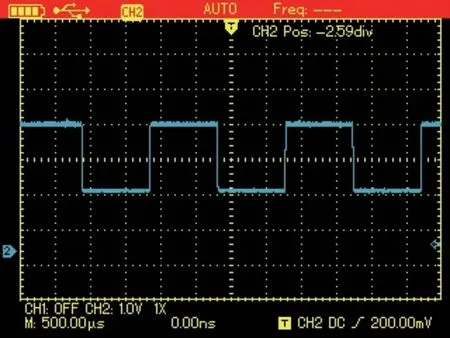
图5 一路脉冲波形
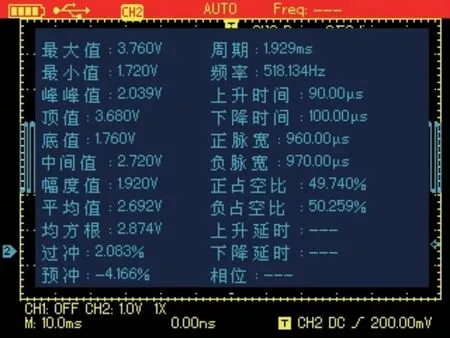
图6 一路脉冲重要参数
式中:RL为负载电阻,此处用模拟电阻(250 Ω)代替。
经过换算可知,电流最大值为15.040 mA,最小值为6.880 mA,与理论计算值相符。
对输出脉冲频率进行标定,表1 为输出脉冲的实验值与理论值对照表。

表1 实测值与理论值对照
由表1 可知,脉冲输出频率实测值与理论值非常接近。对照设计要求,脉冲输出的占空比、电流、频率在误差允许范围内都能满足。
4 结束语
利用STC15W1K16PWM 单片机的高速脉冲输出模块,设计并实现地铁列车制动系统速度传感器输出模拟信号方案;详细介绍主要模块的原理及功能,并完成速度模拟信号的测试。测试结果表明:脉冲输出波形是标准矩形脉冲波,其占空比、输出电流、频率均满足设计要求。该系统有助于提高地铁列车制动测试系统和制动实训系统的可操作性。
猜你喜欢
中学生数理化·八年级物理人教版(2023年11期)2023-12-26 07:50:10
数学物理学报(2022年3期)2022-05-25 13:33:28
小哥白尼(趣味科学)(2021年4期)2021-07-28 02:23:50
云南画报(2021年4期)2021-07-22 06:17:10
小学生学习指导(低年级)(2019年6期)2019-07-22 03:32:48
电子制作(2019年7期)2019-04-25 13:18:00
电子测试(2018年14期)2018-09-26 06:04:08
中成药(2017年12期)2018-01-19 02:06:54
电子制作(2017年24期)2017-02-02 07:14:19
电子设计工程(2015年8期)2015-02-27 12:05:22
