自动贴壁纸的小型机器人
2020-06-30 02:48:06孟冠
科学技术创新 2020年17期
孟冠
(临沂第四中学,山东 临沂276000)
1 绪论
1.1 设计背景
随着科技的迅速发展,人们的生活水平日益提高,可以说现代技术已无时无刻不在改变着我们的日常生活。小到平日的衣食住行大到机械工程科学技术正在朝着给人们的生活带来无限便利从而解放人们的双手的方向发展。自动贴壁纸机正是由此理念的启发设计而出。人工贴壁纸是一个繁琐重复同时具有很高危险性的工作,自动贴壁纸机的产生,不仅提高了贴壁纸的工作效率,同时避免了工作的危险性。
1.2 设计方案
1.2.1 方案论证
自动贴壁纸机主要由动力系统、升降系统、运动系统、自动贴壁纸及自动卷壁纸五个部分组成。
动力系统即在L298N 的控制下实现整个壁纸机的正常工作。
升降系统主要由电机、光轴、定滑轮、皮带等部件得的协调运作下实现自动贴壁纸机正常的升降, 即升降系统是自动贴壁纸机能够正常工作的一大重要基础系统。
运动系统其主要功能为实现壁纸机在一次工作后,按照预设轨迹横向运动以到达新的工作位置开始下一次的重复性工作。
自动贴壁纸部分随着升降系统的工作滚轴运作,壁纸成功贴于墙壁之上,并在软性挂刷的作用下与墙壁实现贴合。接近墙顶时,舵机工作以实现壁纸能够全部覆盖于墙面,刀片在墙顶处将壁纸切断,自动贴壁纸机一次工作结束。
自动卷壁纸部分即将贴壁纸后余留的贴纸回收,便于贴纸回收。
1.2.2 最终方案
本作品应用的是开发板STM32F103ZET6,L298N 电机驱动模块驱动直流电机并结合升降系统,降压模块等各个部分的相协调完成工作
1.3 设计目的
随着科技的不断发展,各个行业迫切需要性能好、使用方便的机械智能产品来提高工作效率。就目前言, 越来越多的人们在装修新家时选择用壁纸代替传统的粉刷墙面, 不仅美观并且相对便于更换。但是壁纸的黏贴却要耗费大量的时间精力,由此我们而设计了这款自动贴壁纸机, 在其帮助下轻而易举便能将墙面焕然一新。提高了效率,保证了作业时的安全。
1.4 创新性
自动贴壁纸机的创新性主要体现在两个方面。
第一个便是其功能的创新性。目前市场上的壁纸大多都是由人工黏贴与墙上, 而自动贴壁纸机通过智能及机械等技术的配合,实现了解放人们双手,自动贴壁纸的功能。
第二个便是理念的创新性。生活在快节奏的今天,人们对人工智能方面的追求越来越高,智能也在各个方面得到应用,市场上有自动擦地机器人、有自动刷墙机器人但是在贴壁纸方面却基本上还是空白, 自动贴壁纸机实现了利用机械智能来实现贴壁纸的功能。
1.5 市场应用性
自动贴壁纸机顾名思义其在市场上最大的应用便是自动贴壁纸,弥补了市场上在智能贴壁纸方面的空白,具有较大的市场空间。
另一个方面, 自动贴壁纸机其他技术可应用于其他的新型机械,例如可改良刷墙机使工作效率更加高。
2 作品设计
2.1 关键技术
由L298N 电机驱动模块控制直流电机致使整个结构能够正常工作。基于STM32 开发板并结合与舵机驱动模块及直流电机等部分相配合共同完成整个活动。
2.2 模块介绍
2.2.1 电机驱动模块
采用L298N 电机驱动模块。电机驱动一般采用H 桥式驱动电路,L298N 内部集成了H 桥式驱动电路,从而可以采用L298N电路来驱动电机。通过单片机给予L298N 电路PWM信号来控制小车的速度,启停。
2.2.2 STM32
STM32 系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARM CortexR-M0,M0+,M3, M4 和M7 内核。在STM32F105 和STM32F107 互连型系列微控制器之前,意法半导体已经推出STM32 基本型系列、增强型系列、USB 基本型系列、互补型系列;新系列产品沿用增强型系列的72MHz 处理频率。内存包括64KB 到256KB 闪存和20KB 到64KB 嵌入式SRAM。新系列采用LQFP64、LQFP100 和LFBGA100 三种封装,不同的封装保持引脚排列一致性,结合STM32 平台的设计理念,开发人员通过选择产品可重新优化功能、存储器、性能和引脚数量,以最小的硬件变化来满足个性化的应用需求。
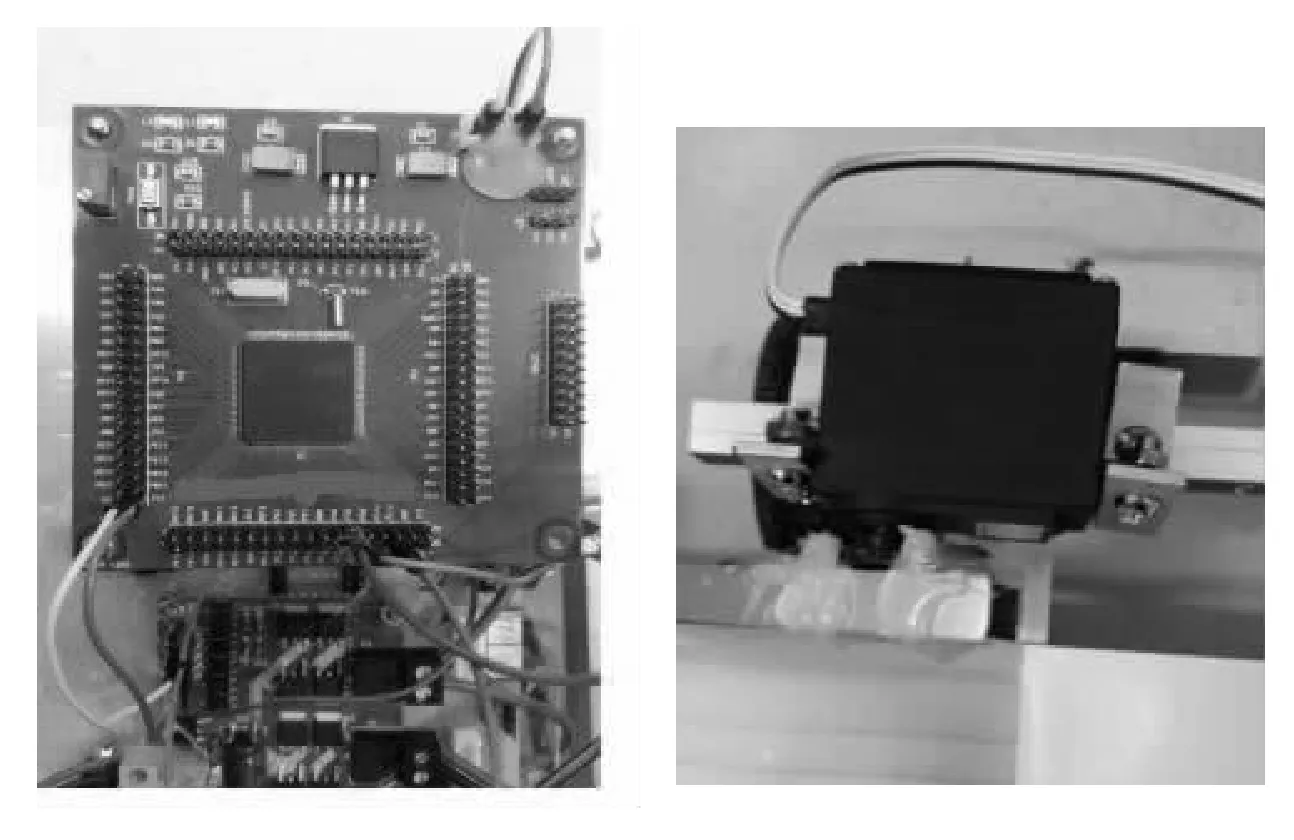
图1
2.2.3 舵机驱动模块
舵机驱动模块是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。舵机主要是由外壳、电路板、驱动马达、减速器与位置检测元件所构成。其工作原理是由接收机发出讯号给舵机,经由电路板上的IC 驱动无核心马达开始转动,透过减速齿轮将动舵机将动力传至摆臂,同时由位置检测器送回讯号,判断是否已经到达定位。位置检测器其实就是可变电阻,当舵机转动时电阻值也会随之改变,藉由检测电阻值便可知转动的角度。
猜你喜欢
现代装饰(2020年2期)2020-03-03 13:37:30
家居廊(2019年10期)2019-09-10 07:22:44
自动化学报(2019年6期)2019-07-23 01:18:36
现代装饰(2018年5期)2018-05-26 09:09:54
电子制作(2018年1期)2018-04-04 01:48:14
电脑爱好者(2017年5期)2017-05-04 19:31:13
制造业自动化(2017年2期)2017-03-20 14:26:08
学习月刊(2016年4期)2016-07-11 02:54:08
戏剧艺术(上海戏剧学院学报)(2016年5期)2016-01-23 02:36:28
剑南文学(2015年2期)2015-02-28 01:15:25