
Promax3Dmid口腔CBCT的工作原理及常见故障解析
2020-06-29 07:21王开
机电信息 2020年12期
关键词:故障处理


摘要:以现今最流行的口腔CBCT(锥形束CT)为例,简述其先进的成像原理及最具性价比的扫描视野(FOV)的应用,介绍了Promax 3Dmid口腔CBCT设备安装完成后的详细调试步骤,并对常见几大组成部分故障等进行重点分析,能够帮助用户高效地进行后期维护及管理,力求使CBCT设备在口腔X光影像诊断中能发挥极致作用。
关键词:CBCT;FOV;口腔应用;故障处理
0 引言
随着科学的进步,个人健康管理观念的提升,医疗服务团队日益私有化,随着服务质量的大大提升,往往只有在公立医院才可以见到的X光设备也慢慢进入众多私立医疗机构,其中最常见的应属口腔医疗设备。近些年大热的口腔CBCT(锥形束CT),业内人士常常称为“三维X光射线设备”,其因为较高的成像分辨率、更低的辐射剂量、更加精确的数据信息、更短的扫描时间等优点,被越来越多的口腔医疗工作者所应用。
1 绪论
1.1 X射线口腔CBCT的成像原理
口腔X射线CBCT原理是X射线发生器以较低X射线量(通常球管电压在90 kV左右,管电流在10 mA左右)围绕投照体做环形锥形束(DR)的数字投照(图1)。围绕投照体进行多次(360次左右)脉冲波形式的X射线投照后以“交集”形式所获得的数据在计算机中重组(Reconstruction),经过计算机重建后获得三维图像[1]。
1.2 Promax 3Dmid产品影像接收器的优点
随着科学技术的发展,口腔CBCT的探测器接收装置已从影像增强器、CMOS平板探测器发展到今天的非晶硅平板探测器,功能上已从单一的扫描方式(三维图像)发展到三种或多种扫描方式(二维全景、二维头颅和三维图像)。相比传统的CCD探测器,非晶硅平板探测器(图2)减少了图像的衰减,影像增强器会产生失真和亮度的不一致性,平板探测器则能避免此现象,从而大大提高了图像的空间分辨率,保证了图像质量[2]。
1.3 口腔CBCT中FOV的含义及主要用途
芬兰普兰梅卡公司生产的Promax 3Dmid口腔CBCT是一款多功能型口腔CT,可拍摄三维影像、二维全景影像及二维头颅影像,是一款新型三维口腔CT产品,它具有占地面积小、投照影像清晰、操作简便、散射线少等特点。医学影像中的FOV(Field Of View)即视野,不同的FOV可以针对不同种类的患者进行有针对性的治疗,而越小的FOV就可以获得越高的清晰度(图3)。
不同FOV的相关学科应用如表1所示。
2 Promax 3Dmid口腔CBCT的基本组成结构
Promax 3Dmid口腔CBCT根据整体结构可以划分为五大部分(图4):
(1)升降立柱部分(控制设备高低便于患者定位)。
(2)C型臂(用旋转轴固定于立柱延伸区域,可围绕患者做360°旋转采集CBCT及全景影像数据)。
(3)头颅侧位部分(1.2 m横臂直接固定于立柱,随立柱升降,用于采集患者正侧位影像数据)。
(4)球管、高压及影像采集部分。
(5)设备操作面板(用于设备信息的获取及功能模式的选择等)。
3 Promax 3Dmid口腔CBCT常见故障分析及处理
对口腔CBCT产品进行维修时,务必始终关闭电源,打开外部罩壳之前切记断开以太网及曝光控制器部分,只有在所有维修结束及设备复原后方可连接电源。球管及高压发生部分存在高压电路,采用组合机头的形式,X光发射时会产生高压,维修时要注意安全[3]。
3.1 C型臂旋转故障问题分析及处理办法
上文中提到口腔CBCT在工作时会围绕患者做环形投照,一旦发生不能正常旋转完毕及自动复位的情况,会影响整个拍摄及图像的采集。在分析此类问题时,应由浅到深地分析故障原因并进行处理。
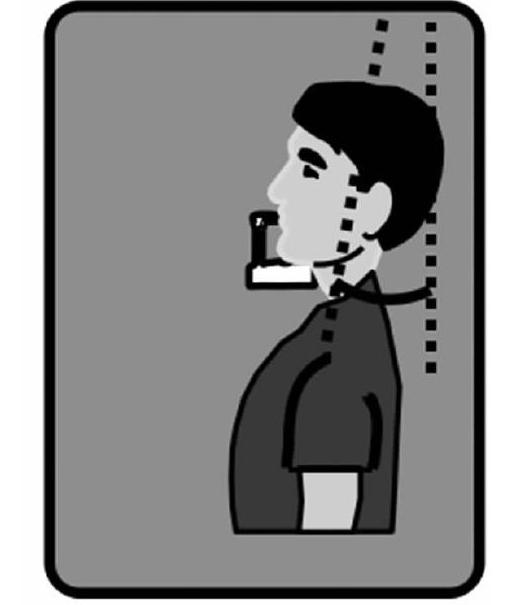
(1)检查设备是否已经完全拍摄完毕,在PC端是否可以点击“完成”按钮并保存图像,如果可以首先根据采集后的X光故障图像观察患者是否在整个设备运行过程中非正常接触到设备运行轨迹,在拍摄期间是否能够听到马达空转或打滑的声音或其他异常的不顺滑的响动,马达在带着C型臂做环形投照时声音应非常平顺,通过观察并询问发现,此故障是由于患者的肩膀或身体接触到设备的运动部分,导致设备未能正常旋转拍摄完成,此种情况认为是人为操作不当引起,应保证正确的患者定位模式,尽量使得患者肩膀与旋转臂之間有一定的距离,患者保持微微向后倾斜的姿态(图5),眼睛平视并放松,以后应予以避免并加强规范使用。
(2)排除人为因素后,设备C型臂不能旋转至正确位置或是卡住旋转打滑,并伴随打滑的声响,大约1 min后设备的显示屏上会出现E26的报错信息。如错误提示为“旋转马达总成旋转超时”,反复测试后情况依旧,马达在旋转轨道中不断打滑,应打开设备罩壳并检查马达情况(图6),通过测量得知马达驱动板的输出电压在正常的DC24 V,则可确认马达供电正常。用酒精纱布擦拭旋转轨道,有极少量摩擦铁屑,判断马达供电及轨道阻力属于正常情况。
测试马达拉力弹簧时发现虽然弹簧力度正常,但在弹簧收缩和舒张时并不是十分迅速且有摩擦卡顿,拆开马达固定组件后发现,之前用于固定C型臂马达的螺丝垫片变形,由于形变导致旋转摩擦力过大(图7)。
将变形的垫片取下后,不垫垫片进行测试,但故障依旧,问题仍然不能解决,判断马达和固定螺栓之间需要一定的间隙,故重新更换垫片并擦拭轨道,之后使用正常。但分析由于C型臂本身采用平衡杠杆原理,球管处较重,所以即使更换了垫片仍然不能长久地解决这个问题,后期由于频繁的使用还会导致垫片变形,从而影响使用。经过研究和不断测试发现,将垫片更换为2个圆形胶片(图8),这样摩擦更小,转动更平滑,使用时间更久。
维修时,可能会有人认为是拉力弹簧过紧导致马达与轨道不能完全贴合,其实上述所讲垫片才是引起故障的主要原因,所以切勿拉松马达一侧的拉力弹簧,很多情况恰恰是弹簧拉力不够导致C型臂不能正常走位造成的,一旦拉力弹簧出现问题,就需要进行更换。
(3)观察机械部分马达外观正常,在设备不通电模式下用力轻推C型臂进行查看,旋转稍微有些卡顿不平顺。通过声音判断在旋转过程中有不平顺的声音,机器通电状态下用万用表测量马达驱动板输出电压,待机状态下为+24 V DC,继续测量驱动板上其余测试点电压全部正常(图9)。
于是将马达组件取下并脫离旋转部分,利用程序使设备不发出X射线作机械环绕运动,还是发现马达运转卡顿并伴随轻微异响。于是拆开并取下马达,尝试用手测试旋转马达轴承,发现阻力很大,通电后马达很难转动并伴随强烈抖动,于是判断为马达故障,更换马达后设备运行一切正常。
综上所述,在遇到马达组件问题、摩擦问题和电路板问题时,更换配件或修复后一定要进行C型臂旋转校准,以保证图像质量和避免后期产生问题;另外,还应保证严格执行使用规范。
3.2 球管及高压部分故障问题分析及处理办法
设备偶尔会出现无法曝光或曝光过程中有中断现象的故障,且曝光清晰度不够,图像噪点大。对于不是始终出现的故障,在维修设备前,首先测量设备外部供电电源电压是否正常,确认是否是电压波动所致,因为口腔影像设备采用的是组合球管机头,不单独配备高压发生器,设备的高压产生部分集成在电源输入PSU电路板上。在检查输入电压正常后尝试进行球管校准训练,观察曲线能不能达到正常曲线值(图10)。
球管训练原理就是尝试将球管电压从低kV和mA一直校准到最高值并观察其曲线是否与正常值有偏差。在此次维修的检查中,我们发现进行校准可以正常通过且曲线值也与正常值基本没有偏差,于是反复查阅设备错误历史记录,发现出现过错误提示E332。根据手册用万用表测量球管与电源板之间的连接是通路;用万用表测量曝光时的反馈FBK电路板电压均正常,并且曝光反馈电路板高压指示灯提示正常。于是找来示波器尝试抓取曝光期间的反馈波形,最终在尝试多次后终于抓到反馈波形不正常状态。在分析电路部分及连接后考虑球管本身存在问题,可能有打火现象,于是全面检查球管,终于在球管前遮挡束光筒及2.5 mm Al过滤装置后面的玻璃窗内发现细微的裂纹,有渗油现象,但由于存在铝过滤和束光器的包裹并没有渗透出来。
综上所述,经过仔细排查后发现球管存在问题,真空密封不良,所以内部打火引起无法曝光,管口的玻璃裂纹导致射线不集中、有散射,直接影响图像质量。故分析此类现象得出以下结论:球管不能正常曝光与其本身及高压控制部分相关[4]。
4 结语
本文以现在最领先及主流的口腔CBCT为研究对象,针对其视野、结构及调试校准进行了介绍,并重点对常见的几类问题的维修和处理方法进行了举例说明,涵盖了机械旋转部分、球管及高压拍摄部分等,希望能为相关从业人员带来有效帮助。
[参考文献]
[1] 吴秦,白石柱,赵铱民.CBCT三维成像技术在口腔医学领域应用现状[J].临床口腔医学杂志,2015,31(2):123-125.
[2] LIVELY T.Planmeca ProMax[R]3D Imaging system[J].Dental Products Report, 2015, 49(11): 90.
[3] MOHAMMAD G,REZA F,R PAYDAR,et al.EFFECTIVE DOSE IN TWO DIFFERENT DENTAL CBCT SYSTEMS: NEWTOM VGi AND PLANMECA 3D MID[J].Radiation protection dosimetry, 2017,176(3):287-293.
[4] MARCU M,HEDESIU M,SALMON B,et al.Estimation of the radiation dose for pediatric CBCT indications:a prospective study on ProMax3D[J].International Journal of Paediatric Dentistry,2018,28(3):300-309.
收稿日期:2020-03-16
作者简介:王开(1989—),男,湖北宜昌人,助理工程师,研究方向:应用技术维修。
猜你喜欢
科学与财富(2016年29期)2016-12-27
科教导刊·电子版(2016年29期)2016-12-23
山东工业技术(2016年23期)2016-12-23
博览群书·教育(2016年9期)2016-12-12
中国市场(2016年41期)2016-11-28
科学与财富(2016年28期)2016-10-14
科技视界(2016年20期)2016-09-29
