
智能铺设地砖机器人设计
2020-06-29 07:16史春笑毛厚昌谭泽德欧健威葛宏翔
微型电脑应用 2020年5期
史春笑 毛厚昌 谭泽德 欧健威 葛宏翔


摘 要:设计一款智能铺设地砖机器人。该机器人以GOT1050触摸屏为上位机,以三菱 FX3U型PLC为控制器,通过控制相关电机和真空吸盘工作,实现自动铺设地砖功能。该机器人具有手动、单循环、连续、回原点等操作模式,功能齐全,实用性强。
关键词:机器人;触摸屏;PLC;电机;地砖
Abstract:An intelligent tile laying robot was design. The robot uses GOT1050 touch screen as the upper computer, Mitsubishi FX3U PLC as the controller. It realizes the function of automatically laying floor tiles by controlling the relevant motors and vacuum suction cups. The robot has manual, single cycle, continuous, returning to the origin and other operation modes. It has complete functions and strong practicability.
Key words:robot;touch screen;PLC;electric machinery;floor tile
0 引言
目前,在建筑行业中普遍采用人工手动铺设地砖,这种铺设方式工作效率低,且随着地砖的尺寸逐渐增大,人工铺贴的劳动强度也越来越大,影响工人身体健康[1],而且不能保持稳定的铺设质量。因此,研制自动铺设地砖机器人,解决人工铺设地砖时存在的一系列问题,对提高铺设质量和效率至关重要。
1 系统总体设计
智能铺设地砖机器人控制系统由下位机和上位机两部分组成。下位机由硬件和软件两部分组成,其中硬件部分主要由PLC、传感器、主令电器、步进电机、振动电机、推杆电机、真空吸盘等组成;软件部分主要包括主程序、连续运行程序、单周期运行程序等;上位机由触摸屏和软件GT Designer2两部分组成。系统原理框图[2],如图1所示。
2 系统硬件设计
2.1 系统结构框图
系统结构框图,如图2所示。
2.2 移动支架设计
支架结构设计。该机器人的支架结构按照能铺设长×宽分别为30 mm×30 mm和40 mm×40 mm两种不同规格尺寸的地砖进行设计。因要完成在一个区域内铺设两行三列地砖的工作,所以支架底面最小的有效空间为长120 cm、宽80 cm,再加上地砖的取料区、电气控制柜的安装区及要预留的空间,最终该支架的有效空间尺寸设计为长130 cm、宽135 cm、高35 cm,铺设区域长130 cm、宽90 cm,取料区长45 cm、宽45 cm,安装电气控制柜的区域长85 cm、宽45 cm。
支架转移定位的实现。当该机器人铺完一个区域的地砖后,能自动转移到下一个区域进行铺设。根据该机器人的工作环境及支架结构特点设计支架向右边转移,其传动机构安装在支架的右边。该模块由轮子、轴承、轴芯、齿轮、链条、步进电机等组成。
2.3 机械臂设计
机械臂结构设计。机械臂采用三根滚珠丝杠作为传动机构,分别作用在X轴、Y轴和Z轴,使机械手在一定区域内能进行精准定位。其主要由行程开关、两组X轴移动平台、一组Y轴移动平台、一组Z轴移动平台和3台步进电机组成。行程开关分别安装在XYZ三轴滚珠丝杠有效行程的两端,并各预留一段行程空间,主要用于故障时保护滚珠丝杠及整个工作平台[3-4]。
机械臂定位的实现。由PLC控制电机的转动步数,由丝杠把旋转的运动状态转换为直线运动状态,其步数乘以丝杠的导程就得到了机械臂移动的距离,最终完成机械臂精准定位的目的。设计时采用适合的电机驱动器,按照程序写好的脉冲规律控制步进电机各相绕组的通断。
2.4 机械手设计
机械手结构。该机器人使用真空吸盘机械手,主要起到吸持、传递、脱开地砖及联合振动机对地砖进行夯实的作用。该机械手由空气压缩机、调压阀联件、电磁阀、真空发生器、真空吸盘、气管、行程开关及振动机等组成[5]。在设计中为了配合真空吸盘的使用,选取能产生0.7~0.8 MPa气源的空气压缩机。真空吸盘机械手的结构,如图3所示。
机械手功能实现。为了使机械手稳固地吸取地砖,并联安装两个真空吸盘,且在吸盘上面装有振动机作为夯实地砖的动力源[6]。在两个吸盘之间的间隙中安装一个与吸盘同一个水平面的行程开关,目的是使机械手在取料区能更方便的吸取地砖,而不需要在取料区设计传送带把地砖传送到固定的位置。
2.5 支架调整模块设计
支架水平度检测。采用激光对射传感器检测支架水平调整信号,它分为发射器和接收器两个部分,发射器和接收器在同一直线上,且彼此分开,当发射器所产生光线被阻挡住的时候,接收器就不能接受到该光线[7]。将3组发射器都安放在支架右上角,分别射向安装在支架左上角的接收器(1)、左下角的接收器(2)和右下角的接收器(3),且它们都安装在同一水平面上,此时接收器接收到信号,输出低电平0。当支架向一边倾斜时,接收器和发射器不在同一水平面上,接收器接收不到信号,输出高电平1。
支架水平度调整。当支架从一个区域转移到另一个区域后,要对支架进行水平度的调整。设计时采用中间继电器(K8、K9、K10、K11、K12、K13、K14、K15)驅动推杆电机动实现对支架水平度的调整。
2.6 控制面板设计
为方便操控机械手,设计控制面板,如图4所示。
2.7 系统电气接线图
智能铺设地砖机器人的电气接线图见附录所示。
2.8 机器人实物图
铺设地砖机器人实物图,如图5所示。
3 系统软件设计
软件设计是智能铺设地砖机器人的核心,本设计采用三菱PLC较常见的编程软件GX Developer进行编程。本文主要介绍机器人的自动模式程序设计。
3.1 系统程序流程图
机器人具有手动操作、返回原位操作、自动操作三种操作模式,在自动操作模式下又设计了单循环操作和连续操作。采用选择性分支设计步进梯形图,通过条件设定,实现4种操作模式的选择。系统流程图,如图6所示。
3.2 主程序设计
主程序是整个系统程序的主体,包括系统起动、暂停、停止以及切换到各模式的程序。主程序中使用状态初始化指令IST可以简化程序,IST指令设定了3种操作方式,分别用S0、S1、S2作为这3种操作方式的初始状态步。S0:手动操作方式;S1:返回原位操作方式;S2:自动操作方式,上述三种方式的输入控制信号由X20~X27共8点输入信号设定[8]。
3.3 连续运行与单循环运行程序设计
自动模式包括连续、单循环两种运行模式。连续模式是指完整地铺设完一个工作区域的地砖后转移到下一个工作区域继续铺设,可连续铺设若干个工作区域;单循环模式是指完整地铺设完一个工作区域的地砖后停止工作,等待命令。连续与单循环工作流程,如图7所示。
4 触摸屏设计
采用三菱GOT1050触摸屏作为人机界面,利用软件GT Designer2设计触摸屏界面。
4.1 建立工程
通过新建工程向导,快速完成工程设置。选择GOT类型为GT10**-Q(320x240),横向放置,256色。选择GOT连接机器,制造商选三菱电机,机种选MELSEC-FX,选标准I/F(标准 RS-422),选择“MELSEC-FX”的通讯驱动程序,默认选择MELSEC-FX驱动,最后确定各项选择是否正确,完成建立工程。
4.2 设计界面
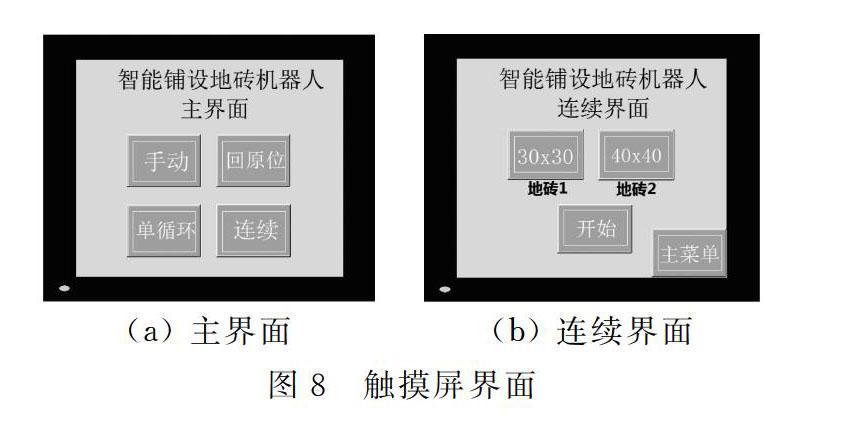
界面设计包括主界面、手动、回原位、单循环、连续等5个界面设计,后4个界面对应着各自的操作模式,界面之间可以切换。每个按钮都对应着相应的软元件触头,实现触摸屏对PLC的控制。主界面和连续界面,如图8所示。
主界面中手动、回原位、单循环、连续四个按钮是用来选择与四种操作模式对应的程序;连续界面中30×30、40×40按钮是用来选择铺设不同规格地砖的程序,开始和主菜单按钮是分别用来启动铺设相应规格地砖的程序和返回主界面。
4.3 定义变量
在触摸屏设计时,通过设定参数代替实体按钮,可节省PLC I/O口,简化系统硬件布线。变量定义如下:X20-系统手动模式选择按钮,X21-系统返回原位模式选择按钮,X23-系统单循环模式选择按钮,X24-系统连续模式选择按钮,X25-系统手动模式下回原位按钮,X31-系统手动模式下方向信号输入,X32-系统手动模式下脱机信号输入,X33-系统手动模式控制X轴电机的中间继电器输入,X34-系统手动模式控制Y轴电机的中间继电器输入,X35-系统手动模式控制Z轴电机的中间继电器输入,X36-系统手动模式控制电磁阀输入,X37-系统手动模式控制振动机输入。
4.4 动画设计
动画设计包括按钮设置和画面切换。通过对按钮的图像变化突出按钮状态;通过设置不同的功能,切换不同的画面。
5 总结
智能铺设地砖机器人通过运用PLC技术、气动技术、机械技术及电气技术设计机器人主体结构,使用GX Developer软件进行编程,基于GT Designer2软件设计触摸屏界面,为铺设地砖机器人完成手动、单循环、连续、回原点操作打下坚实基础,提高了地砖铺设质量和效率。
参考文献
[1] 赵刚.直角坐标式地砖铺贴机的设计研究[J].机电技术, 2015(6):31-32.
[2] 温杰,史春笑,毛厚昌,等.基于PLC智能铺设地砖机的机械手設计[J].发明与创新,2008(7):29-31.
[3] 刘燕,邹萍,管文娟.基于PLC的三轴机械手控制系统的设计与实现[J].制造业自动化,2016:38(7):21-24.
[4] 李刚,周文宝. 直角坐标机器人简述及其应用介绍[J].伺服控制,2008(9):72-75.
[5] 杨密.气动机械手的 PLC 控制系统设计[J]. 装备制造技术,2015(2):183-184.
[6] 司震鹏,曹西京,姜小放. 真空吸附式机械手系统设计[J].包装与食品机械,2009,27(6):26-30.
[7] 周志敏.光电检测装置应用中的问题分析[J].电子元器件应用,2003,5(5):40-42.
[8] 王阿根.电气可编程控制原理与应用[M].(第3版).北京:清华大学出版社,2016:259-263.
(收稿日期:2019.09.23)
猜你喜欢
机电工程技术(2021年3期)2021-09-10
作文·初中版(2020年9期)2020-10-12
文萃报·周五版(2020年23期)2020-06-11
环球时报(2019-07-18)2019-07-18
现代职业教育·中职中专(2018年7期)2018-05-14
诗林(2016年5期)2016-10-25
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
科技视界(2016年15期)2016-06-30
