
一种基于双模型的低成本多AUV 协同定位方法
2020-06-29 08:50:12徐博李盛新张奂
中国舰船研究 2020年3期
徐博,李盛新,张奂
哈尔滨工程大学自动化学院,黑龙江哈尔滨150001
0 引 言
自主水下航行器(autonomous underwater vehicles,AUV)在水下监视、海洋调查、生物监测等诸多军事、民事水下任务中得到了广泛的应用[1]。由于射频和全球定位系统(GPS)信号在水下快速衰减的特性,导航定位问题成为发展AUV 面临的重要挑战。高精度陀螺仪和加速度计组成的惯性导航系统(INS)是目前最常用的水下定位方法。然而,即使是高精度的惯性传感器也会随着时间的推移积累定位误差,导致定位误差发散[2-5]。1996年日本学者Kurazume Ryo 在机器人定位领域首次提出了协同定位的概念[6]。近年来,利用声呐技术测量AUV 的相对位置关系估计多AUV 协同定位,已成为AUV 定位领域的重点研究问题。相比于传统的长基线(long baseline,LBL)、短基线(short baseline,SBL)和超短基线(ultra-short baseline,USBL)等定位方法[7],多AUV 协同定位方法无需事先布放海底基阵和水面船只等辅助设备,能够有效降低AUV 定位系统的硬件复杂度,适用于AUV 在大范围海域执行各种任务的需求。
协同定位是目前水下中间层区域多AUV 系统最有效的定位方法之一,具有广阔的应用前景。通常情况下,多AUV 协同定位具有两种形式:1)并行式,即系统中每个航行器的功能和结构相同,使用各自的导航系统进行定位,通过水声通信,获取其他航行器的位置信息;2)主从式,也称为领航式,即系统中少量领航AUV 装备高精度导航设备,大量跟随AUV 装备低精度导航设备,跟随AUV 通过水下声学调制解调器获得与领航AUV 的位置关系以提高自身定位精度。并行式的协同定位结构简单,但每个AUV 都装备高精度导航设备,成本将增加很多倍,而主从式兼顾了定位精度和成本,成为多AUV 协同定位研究的主要方向[8]。主从式协同定位系统中,领航AUV 装备高精度INS,多普勒速度计程仪(DVL),GPS 和水声通信设备等,导航定位系统以高精度惯导设备为主,初始位置通过GPS 获得,以DVL 测量的绝对速度作为惯导外部输入,进一步提高了协同定位的精度,跟随AUV 装备低精度INS,DVL 和水声通信设备等。基于高、低精度导航设备的传感网络,通过AUV 间的相对测量与信息共享,进而实现整个编队的导航定位性能提升[9]。
传统的协同定位方法是使用基于状态空间模型的滤波技术,它能够实现统计最优估计,补偿基于传感器的航位推算误差,获得较高精度的状态估计信息[10]。房新鹏等[11]提出一种基于双移动信标的航行器定位方法,双移动信标由2 艘无人水面艇来担任,在2 艘无人水面艇上分别安装有差分GPS、航向与航向角速度传感器及声定位与通信声呐,AUV 上安装有航向、航速、航向角速度传感器及声定位与通信声呐。2 艘无人水面艇上的声定位与通信声呐周期性地发出声定位信号,同时将自身的位置发送给AUV。当AUV 上的声定位与通信声呐接收到无人水面艇发送来的声定位信号和位置信息后,建立状态空间模型并利用扩展卡尔曼滤波器(EKF)进行水下定位。仿真试验证明了所提方法的有效性。然而,当AUV 上装备的航向、航速、航向角速度传感器由于某种原因失效或者被敌方破坏,这种仅基于状态空间模型的滤波技术将会由于无法进行滤波预测而失效。另外,在需要大量AUV 组成集群协同工作的情况下,即使跟随AUV 装备低精度的导航设备,其所需的INS 和DVL 也仍是一笔不菲的成本。故在实际工程应用中,如果跟随AUV 没有装备INS 和DVL,还能够保障协同定位系统的定位精度在允许的范围内,将具有重大的研究价值。
针对上述问题,本文将在传统多AUV 协同定位方法的基础上,结合跟随AUV 与领航AUV 之间的相对运动模型和双领航协同定位状态空间模型,设计一种基于双运动模型的主从式多AUV 协同定位方法,利用相对运动模型估计跟随AUV 的航向信息和速度信息;再通过应用双领航模式的多AUV 协同定位状态空间模型,进一步提高协同定位系统的鲁棒性和准确性。
1 多AUV 协同定位状态空间模型描述
1.1 相对运动状态空间模型
AUV 在水下进行三维空间运动,3 个位置状态变量(x,y,z)分别表示以导航坐标系原点为参考点的AUV 水平位置和深度。由于深度z可以直接由压力传感器得到,为了简化模型维数,使不同深度的AUV 投影在同一水平面内,将三维运动学模型简化为二维运动学模型,如图1 所示。图中,d 为领航艇的投影与跟随艇之间的距离,l为领航艇与跟随艇之间的真实距离。
定义跟随AUV 在tk时刻的位置向量为(xsk,ysk) ,领 航AUV 在tk时 刻 的 位 置 向 量 为(xmk,ymk) ,跟 随AUV 在tk时 刻 的 状 态 向 量 为
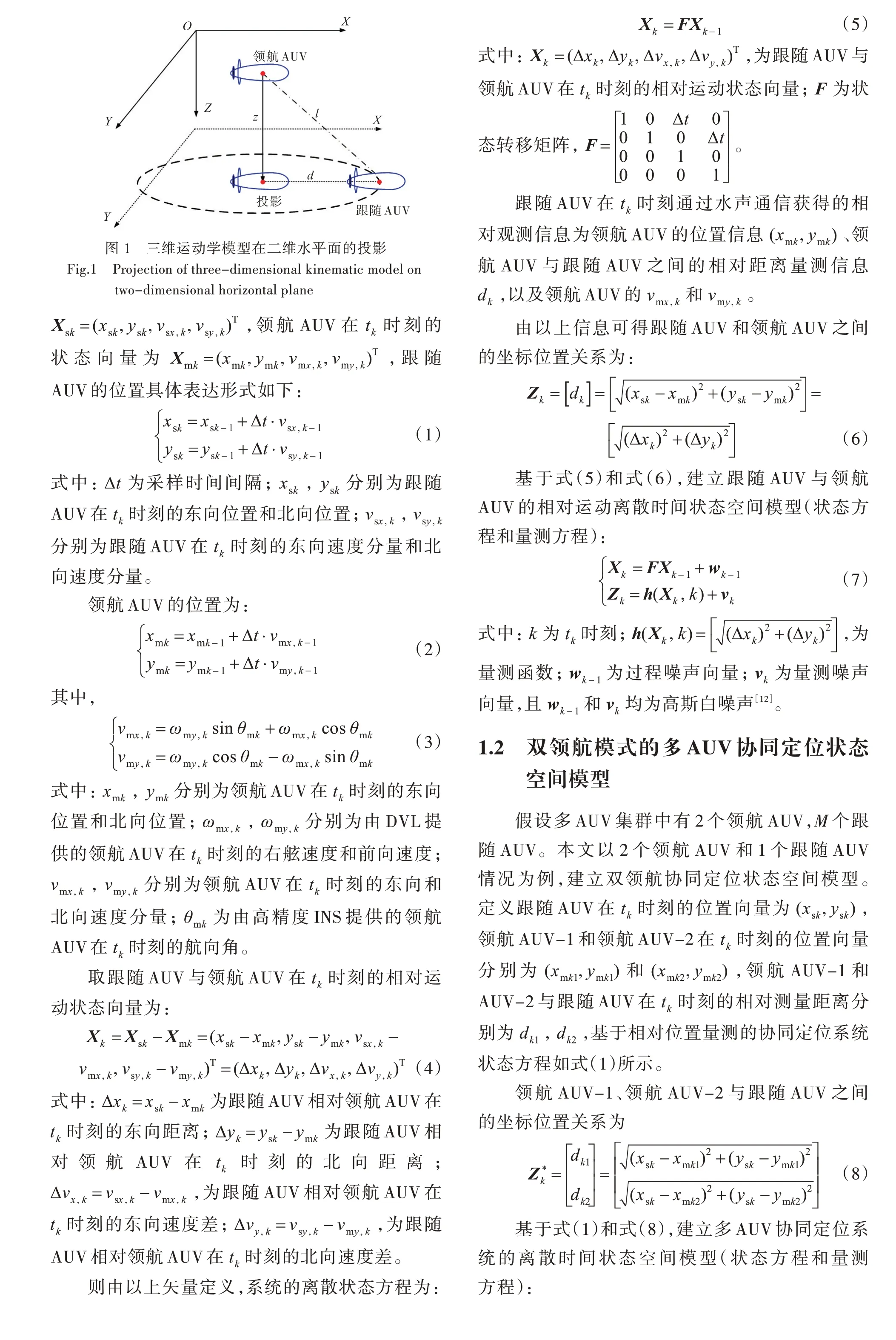

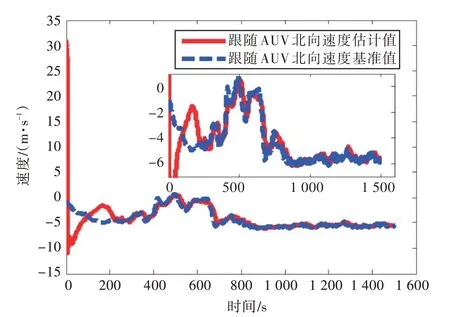
图6 跟随AUV 的北向速度比较图Fig.6 A comparison of the northward velocity of follower AUV
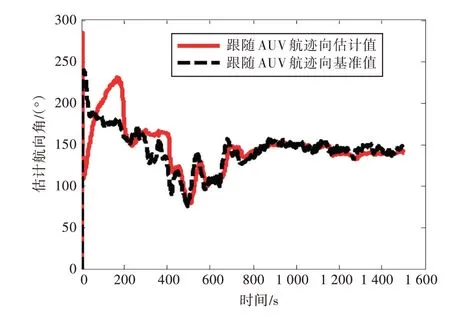
图7 跟随AUV 的航迹向比较图Fig.7 A comparison of the track direction of follower AUV
从试验结果可以看出,本文提出的双模型协同定位方法可以实现在跟随AUV 没有装备INS 和DVL 的情况下实时估计跟随AUV 的位置,并且保障协同定位系统的定位精度在允许范围之内。
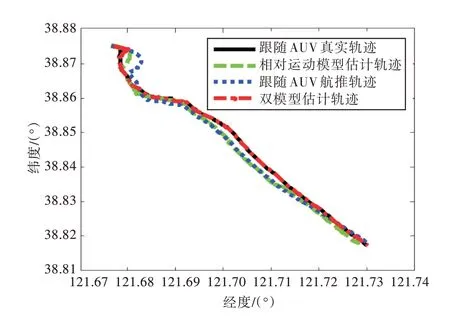
图8 跟随AUV 的航行轨迹比较图Fig.8 A comparison of the sailing track of follower AUV
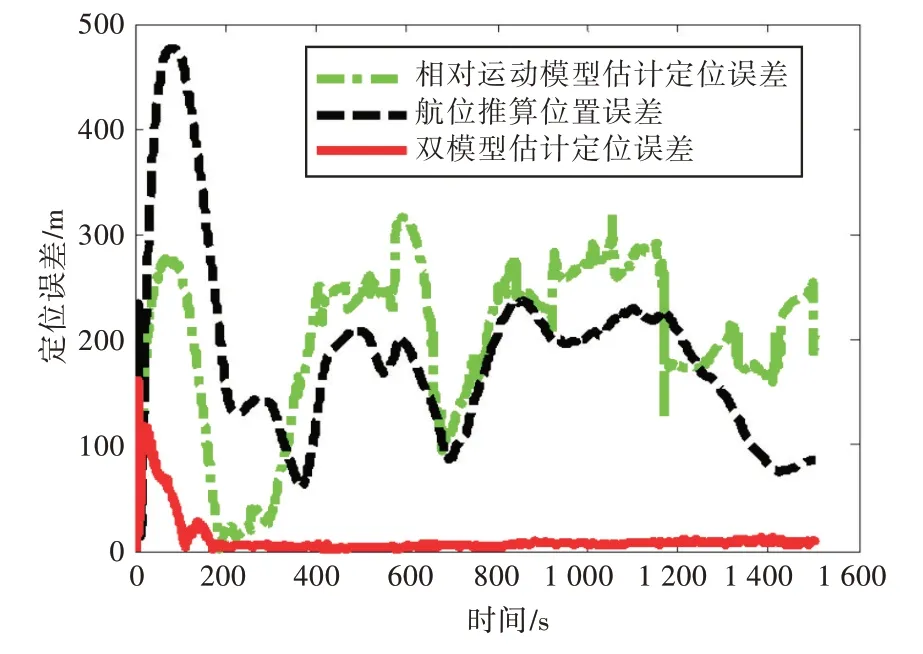
图9 跟 误差比较图Fig.9 A comparisong error of follower AUV
4 结 语
在主从式多AUV 协同定位系统中,跟随AUV装备低精度INS,DVL 和水声通信设备等传感器。然而在跟随AUV 数量较多的情况下,就需要很多的INS 和DVL,系统配置复杂,相应成本也随之提高。针对上述问题,本文以缩减多AUV 协同定位系统成本为目标,在传统多AUV 协同定位方法的基础上,设计一种基于双模型的主从式多AUV 协同定位方法,利用EKF 进行状态估计,估计跟随AUV 的实时航向信息和速度信息,再应用双领航模式的多AUV 协同定位状态空间模型,进一步保障了多AUV 系统协同定位性能。最后,通过海面试验数据进行了仿真试验验证。结果表明,本文提出的基于双模型主从式多AUV 协同定位方法能够实现在跟随AUV 没有装备INS 和DVL情况下,实时、准确地估计跟随AUV的位置。
本文提出的系统定位方法的主要优点体现在:仅基于跟随AUV 和领航AUV 间的相对测量距离及领航AUV 广播的自身位置和速度信息,即可计算得到跟随AUV 的位置、速度和航向信息,节约了大量INS 和DVL,降低了多AUV 协同定位的成本,从而降低AUV 系统配置的复杂性,且节约了跟随AUV 的内部空间并减轻重量;将AUV 相对运动状态空间模型与双领航模式的多AUV 协同定位状态空间模型相结合,保障了多AUV 协同定位系统的协同定位性能。同时,本文所提出的方法也可作为一种提高多AUV 协同定位系统容错性的措施,当跟随AUV 上装备的INS 和DVL 由于某种原因失效或者遭到破坏时,该方法可作为后补算法实时估计AUV 的位置信息,为进一步研究多AUV 协同定位系统、提高系统协同定位性能提供了可行性思路和方法。
猜你喜欢
心声歌刊(2021年5期)2021-12-21 06:33:22
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
草原歌声(2020年3期)2021-01-18 06:52:02
能源(2019年9期)2019-12-06 09:33:04
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
能源(2019年12期)2019-02-11 07:11:46
制造技术与机床(2017年6期)2018-01-19 02:41:22
电子制作(2017年24期)2017-02-02 07:14:16
电测与仪表(2016年24期)2016-04-12 00:21:04
探测与控制学报(2015年4期)2015-12-15 15:00:56
