一种基于能量集中度的光学镜片球差检测方法
2020-06-26 02:19王建华
海峡科学 2020年4期
王建华
(福建师范大学光电与信息工程学院,福建 福州 350117)
1 概述
随着“5G”通讯和大数据时代的到来,人工智能与计算机视觉在非接触测量与检测等领域占据了日益重要的地位。光学镜头作为计算机视觉的“眼睛”,在其整个运行处理过程中起着至关重要的作用,光学镜头分辨率高低直接影响成像质量的优劣,进而影响检测结果的准确度。图像采集系统在图像或视频采集时,系统的成像质量不仅与感光元件的尺寸有关,还与该系统搭配的光学镜头成像质量有关,而光学镜头成像质量主要由安装工艺和镜片分辨率决定,故组成光学镜头的镜片选用不当也是导致图像采集系统成像质量欠佳的主因。本文所述的光学镜片是指凸透镜。球差作为影响光学镜片成像质量优劣的主要因素之一,越来越受到学者们的重视[1]。目前光学镜片球差的检测方法主要是目测法和光学传递函数法[2-4],这两种方法操作繁琐,检测精度和效率低,且主观性误差较大。因此,为更好地提高光学镜头成像质量以适应现代化人工智能发展要求,提出一种精准、高效、自动化程度高的光学镜片球差检测方法具有十分重要的意义。
光学镜片成像质量[5-6]主要由该镜片的分辨率决定,分辨率越高,成像质量越好,而光学镜片分辨率又取决于它的构成材料和生产工艺。传统光学镜片成像质量检测时,人们往往只关心该镜片的分辨率高低,对于是什么导致该镜片分辨低下的因素研究甚少,而球差作为影响光学镜片分辨率高低的主要因素,一直被人们所忽视,球差检测方法更是少之又少。光学镜片球差越小,其分辨率越高,成像质量也越高,反之成像质量越低。图1为球差较大镜头所拍摄的照片,可以看到,因为球差的存在,所拍摄图像呈现模糊不清的状态,且越边缘的地方越模糊。

图1 利用球差较大镜头所拍摄的图像
本文主要针目前光学镜片在球差检测时效率与精度低下、主观性误差较大及存在镜片分辨率和感光器件分辨率不匹配等问题[7-8],提出一种基于能量集中度[9-10]的光学镜片球差检测方法,并建立相应的光学镜片球差检测的理论模型,通过理论推导和数值计算分析星点斑的能量分布与光学镜片球差之间的关系。具体步骤是:首先,通过图像采集系统采集光学成像系统所生成的待测镜片鉴别率图片;然后用Matlab软件和Hough变换圆形检测算法提取图片中的圆形光斑[11],分析该光斑的能量分布信息并用公式法求其能量集中度值,并根据所求的能量集中度值来求该被测镜片的球差;最后采用6组已知不同球差值的光学镜片验证该文算法的可行性与时效性。
2 球差检测原理
本文算法思想来源于衍射受限系统分辨率[12]的思想和星点板镜片球差检测方法,并对它们加以延伸和改进。该方法表现为,先搭建一个光学成像系统,并根据实际情况确定星点鉴别率板型号。接着构建图像采集系统,用以采集星点鉴别率板透过光学成像系统和被测镜片所成的像。而后对采集的图像用Matlab软件和Hough圆形检测算法提取出感兴趣的星点斑。最后计算该星点斑的能量集中度值,并通过所求的能量集中度值计算该被测镜片的球差值,球差检测流程如图2所示。
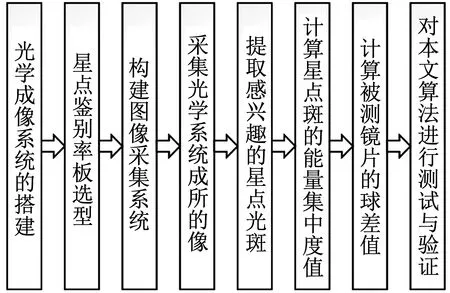
图2 球差检测流程图
2.1 系统设计与架构
为了更好地检测出光学镜头球差,本系统所有的硬件均按照特定顺序置于水平导轨上的黑暗机箱内。如图3所示,从左至右固定的物件依次为LED环形光源、分辨率板、被测镜头、成像板、检测镜头、光电检测器件。其中光源选用LED环形光源,相比于卤钨灯来说,LED灯具有寿命长、功耗低、亮度强等优点。在LED灯前面加一块毛玻璃,可使光线均匀平行地投射出去;分辨率板选用单孔星点分辨率板,置于被测镜片的物象位置上,使产生的物象为一个星点斑光斑;选用适当尺寸的毛玻璃作为成像板,置于被测镜片的成像面上。毛玻璃结构稳定、易固定,且成像面平整度好。其在形成像面的同时又作为新的光源将图像投射出去,以便CCD光电检测器采集;光电检测器选用CCD光电检测器[13]。CCD光电检测器较传统的CMOS而言,工作时噪声小、成像质量好、灵敏度高、成本低。具体步骤为:LED环形光源产生的平行光照射在分辨率板上,被测镜片将分辨率板中的星点斑成像在成像板上,光电检测器件搭配高分辨率的检测镜头,将成像板上的图像采集到计算机中供后续算法分析与处理。
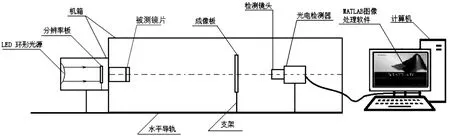
图3 系统硬件架构
考虑球差检测的稳定性和系统的适用性,本方法在算法设计时主要采用Windows操作系统、Matlab软件以及OpenCV第三方图像处理数据库,具有很好的移植性、交互性和扩展性。
2.2 算法原理
本文通过采集分辨率板透过被测镜片在成像板上所成的分辨率图像的灰度值来确定对应点的能量值[14]。灰度值(灰阶)[15]是指亮度的明暗程度,范围一般从0到255,白色为255,黑色为0。灰度图像与彩色图像一样,也可以反映整幅图像的整体和局部的色度、亮度等的分布与特征。用灰度图像来作为处理对象具有效率高、易于实现等特点,是现阶段模式识别中特征提取的重要方法。假设Gray(i,j)是鉴别率图像上坐标(i,j)处对应的灰度值,则其对应点的能量值如下所示:
Emag(i,j)=Graymag(i,j)
(1)
由上式可以看出,图像上灰度值越大即越亮的地方能量值也越大,反之越暗的地方能量值越小。
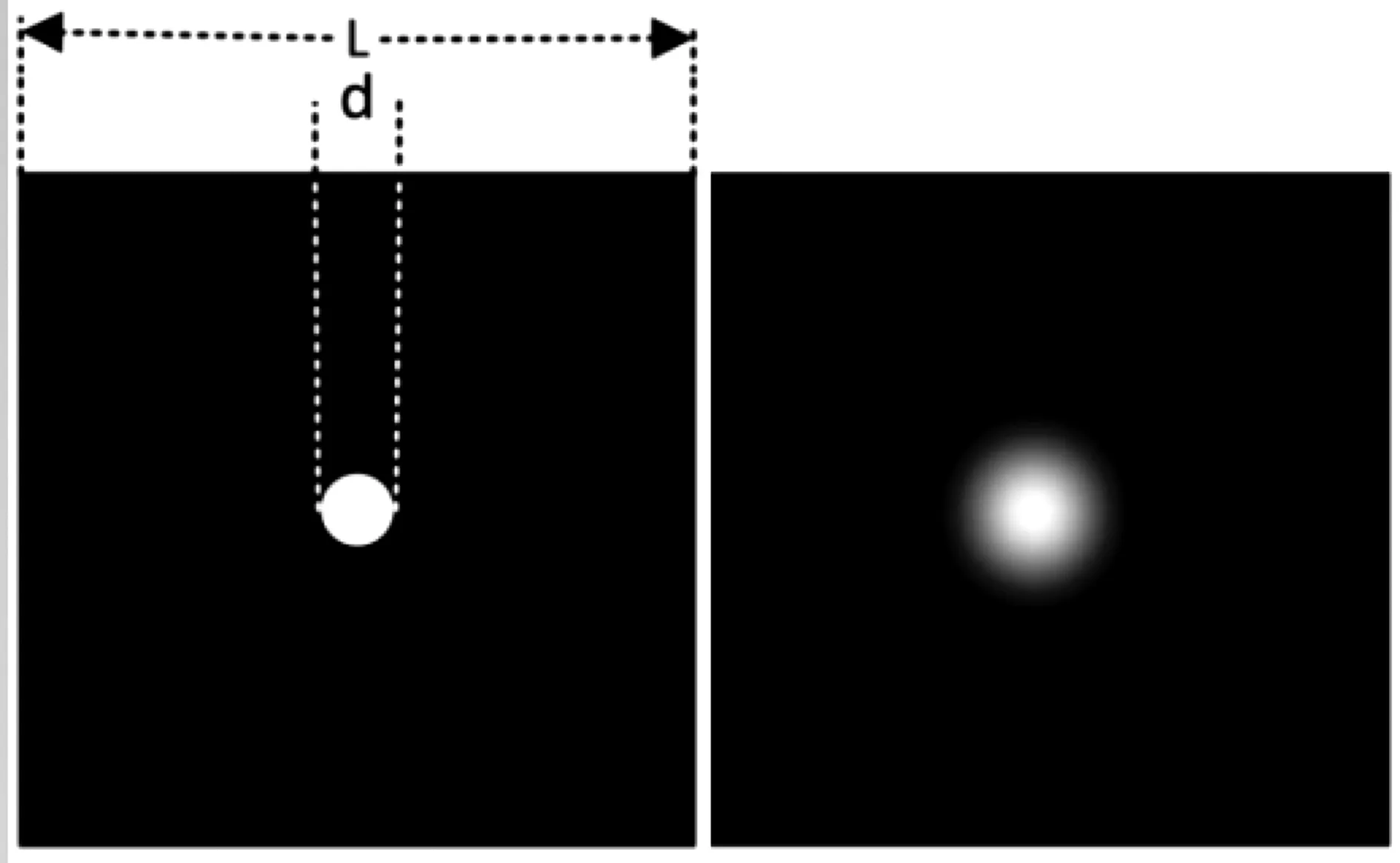
(a)星点板 (b)球差效果图图4 星点板及成像效果
为了精确检测光学镜片球差,该文分辨率板选用如图4(a)所示的正方形星点板,其中星点板的边长为D,中间圆孔的直径为d,除圆孔外,其他部分为黑色不透光材质。将该星点板置于被测光学镜片的物像处,理想情况下,平行白光经过该星点板和被测镜片后在成像板上所成的像也为一个直径为d的白色光斑。当被测光学镜片有球差时,成像板上所成的像为一个弥散的灰度光斑,如图4(b)所示,该光斑灰度值(能量值)小于255,且它的半径大于d,并随着被测镜片的球差增大,半径也随之增大。本文首先将采集到的图像作灰度化处理,用Hough变换圆形检测算法提取灰度图像中的圆形光斑,并得到该圆的半径r和圆心坐标,根据所得的半径和圆心坐标求被测镜片的能量集中度值(ENF),如式(2)所示。
(2)
式中,r为Hough变换检测到的圆形光斑半径,d为星点板圆孔直径,Sr为圆形光斑所在的面积区域,(i,j)坐标属于Sr区域。由上式可知,圆形光斑越弥散,能量集中度值越小。根据理论推导和实验可知,球差越大,圆形光斑半径越大,且从圆心到边缘的灰度值越小,即能量集中度值越小,故被测镜片的球差可由式(3)求得。
(3)
由上式可知,理想情况下,没有球差的镜片SPAB为1,当球差越大,SPAB也越大,故SPAB可定量反映被测镜片的球差大小。
3 球差检测结果与分析
为了验证本算法的可行性和准确性,这里采用6种不同程度球差值的镜片作为被测镜片来验证本文方法的可行性。镜片1至镜片6的球差依次变大,用工业高清CCD相机分别采集这6种镜片在成像板上所成的星点像,通过该文所述方法和公式处理得出的数据如表1所示。
由表1可知,被测镜片球差越大,星点板透过被测镜片所形成的弥散光斑半径也就越大,且灰度值越小。通过Hough 算法所检测出的圆的半径也随着被测镜片球差变大而变大,然后采用式(2)、(3)可分别算出被测镜片能量值和球差值,分析所求的球差值,符合球差特性和检测效果,故本方法能够定量检测出被测光学镜片的球差值。
为了验证上述球差检测算法的准确度和鲁棒性,本文选取若干组不同球差的镜片进行测试,分别用该文算法、哈特曼法、Zemax星点像法以及Zemax刀口阴影法求被测试镜片的球差值,详细数据如表2所示。
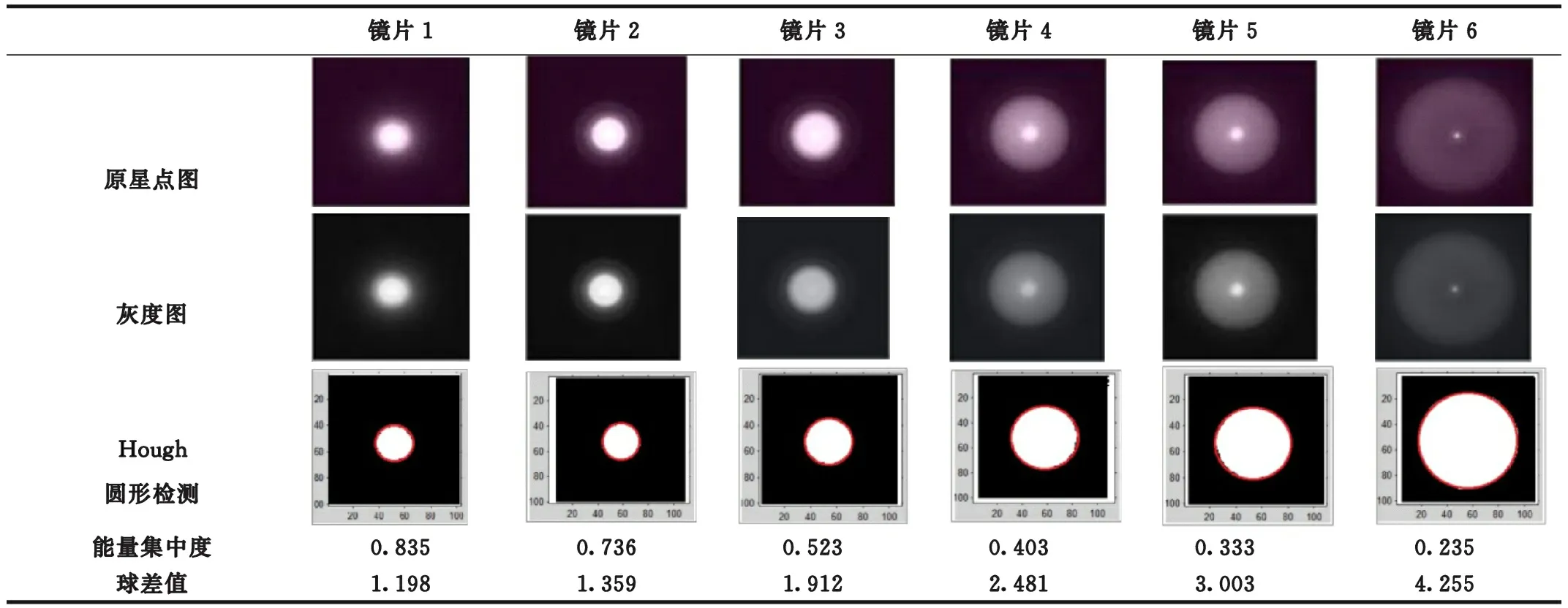
表1 球差检测数据
由表2可知,本算法求得的球差值与其他方法求得的球差值相近,但是该文算法鲁棒性更好、精确度高,且相对于其他方法而言,该文球差检测方法操作简便,检测效率高。
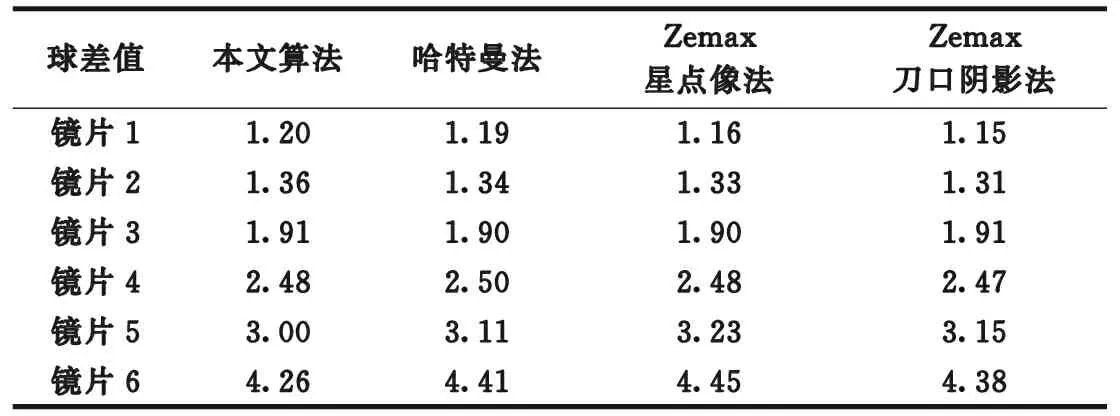
表2 相关方法比较
4 结束语
光学镜片球差的大小直接影响光学镜片和光学系统成像质量的好坏,本文提出了基于能量集中度的光学镜片球差检测方法。该方法通过研究被测镜片在成像板上所成的星点斑的半径和灰度值来计算能量集中度,进而计算出被测光学镜片球差。通过已知球差镜片实验验证表明,该方法能够有效检测出光学镜片的球差,并能将检测出的球差值实时反馈给镜片生产商,用于改进生产,提高镜片生产质量。与其他算法相比,该方法具有高检测速度、高准确率,且受检测人员的主观因素影响较小等优点。
猜你喜欢
中学生天地·高中学习版(2022年4期)2022-05-17
飞控与探测(2020年3期)2020-07-16
空间控制技术与应用(2020年6期)2020-04-28
阅读(高年级)(2019年9期)2019-11-15
VOGUE服饰与美容(2019年8期)2019-11-12
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
北京航空航天大学学报(2019年4期)2019-05-05
中国眼镜科技杂志(2017年22期)2017-12-01
中国眼镜科技杂志(2017年10期)2017-07-10