
通航船闸物理模型非恒定流模拟测控系统研发及应用
2020-06-23 03:28周卓亮陈辉范敏
中国水运 2020年5期
周卓亮 陈辉 范敏

摘 要:船闸扩能改造期施工围堰缩窄了引航道的局部水域宽度,改变了引航道的通航水流条件,对坝区过往船舶的安全航行存在影响。本文针对船闸扩能改造期施工围堰缩窄引航道局部水域引起通航水力学问题,建立水动力数学模型,研究船闸不同运行水位條件下施工围堰对船闸上游引航道和口门区通航水流条件的影响,并提出合理的船闸优化运行方式,降低引航道最大流速,最大波高、水面线坡降等各项水力指标。研究成果对船闸扩能改造期船舶安全快速过闸具有十分重要的意义。
关键词:船闸;引航道;施工围堰;通航水流;数值模拟
通航船闸模型主要用于研究坝区航道通航水力学、船闸输水系统水动力学以及上、下游航道水力学,随着内河航运发展,船闸通过能力以及航运安全要求的进一步提升,对坝区航道通航水力学科研成果质量以及测试精度有了更高的要求,船闸充泄水产生的航道非恒定流问题以及险滩、急弯等自然边界影响航运安全、制约航道通航能力提升等关键技术问题。
本文研发非恒定流控制系统以及基于图形粒子测量系统非恒定流航道流场测试系统,为更精细、快速、系统地了解坝区航道通航船舶航态和通航水流条件,为坝区航道通航模拟的各项任务提供高质量的科技服务平台,为深入研究探讨船舶航行与航道水流条件相互影响关系的基础理论和工程应用提供基础条件。
1 非恒定流控制系统
非恒定流测控系统由可控电动阀门及流量计组成,通过调节阀、换向阀、管道模拟船闸充泄水流量过程,采用数控调制模块及船闸充泄水软件对系统流向控制、分配,实现了模拟船闸充泄水场景。
测控系统采用相位平均法严格按照统计平均的方法对紊流的平均运动特性以及脉动特性进行研究,因而要求能够完全重复周期性的试验,而且各次试验的水流条件以及边界条件完全相同。本系统的非恒定流生成系统由计算机程序控制,从而形成稳定的非恒定流过程,本系统产生的非恒定流过程的稳定性已经过检验。
非恒定流模拟控制系统主要有以下特点:
(1)使用数控调制模块控制可控电动阀门能够得到较好的非恒定流过程,同时在管路上安装电磁流量计测量总水管流量,上位计算机控制流量时进行计算控制模型流量按照船闸充泄水设定模式运行。
(2)电磁流量计测量总水管流量数据信号直接接入中心计算机控制系统,控制系统随时对流量进行记录。并且随时可以生成EXCEL报表和趋势曲线。
(3)实验者可自定义设置各阀门开启流量过程、开启时间,可以模拟多组合船闸充泄水流量过程。
2通航水流流速分布测量系统
通航水流流速分布测量系统是基于粒子图像测速法(PIV)原理,如图 3 所示,运用图像处理、模式识别与快速时序处理等技术开发研制的新一代表面流场测量及分析系统。设计了具有良好仿射变换鲁棒性的局部特征配准算法模块,提升了系统在示踪粒子高速运动、旋转、遮挡情况下的追踪能力,同时,通航水流流速分布测量系统满足不同大小范围试验流场测试,通过多通道高分辨视频联合,利用数据拼接功能对不同测量区域流场数据进行拼接,生成完整的大规模表面流场数据文件,实现了大范围模型水流流场测试要求。
通航水流流速分布测量系统满足大范围模型水流流场测试要求及精度,模型范围大于1000m2,大规模组网测量,系统模块化设计,扩展性优异,实现大范围流量同步测试,且不扰动水流,抗干扰能力强,测量精度毫米级的,精细流场高精度测量。可测流速范围为0.1mm/s-10.0m/s,平面内流场测量精度1%,垂直于平面的流速测量精度1.5%;采样频率1500帧/秒,最高频率达10000帧/秒;流场最小空间分辨率0.2mm;测量平面及三维流场,可测颗粒体积浓度范围为0-0.1%。
该系统具备以下几个特点:
(1)系统稳定运行能力。在复杂多变的现场环境下能够安全稳定高效地运行,能够适应全年的温度、湿度变化;量测数据稳定准确。
(2)高精度测量能力。保证系统的高精度量测效果,能给出丰富的表面流场数值,能给出高密度的实测数据,所测流速值可被直接采信,精度可与ADV数据比对。
(3)复杂流态测量能力。对复杂精细流场具备捕捉、刻画能力;精确测量涡旋结构,为科研工作者开展精细流场的理论机理研究提供强有力的实验保障
(4)移动与便携测量能力。Namec-Advanced系列设备提供多角度量测功能,提供移动安装以及多角度测量功能,方便科研工作者在不同模型上使用该套设备进行测量。
3物理模型非恒定流模拟测控系统
3.1物理模型概况
建立1:50船闸水力学物理模型。模型模拟范围包括整个上游引航道、船闸上闸首、各处靠船墩、各船闸进水口、口门区长750m河道等。模型全长约80m,最宽22m。模型采用上述非恒定流控制系统模拟各线船闸泄水过程,同时利用建立通航水流流速分布测量系统地进行流态、水面波动、流速分布等测试,开展引航道通航水流条件及改善措施研究。
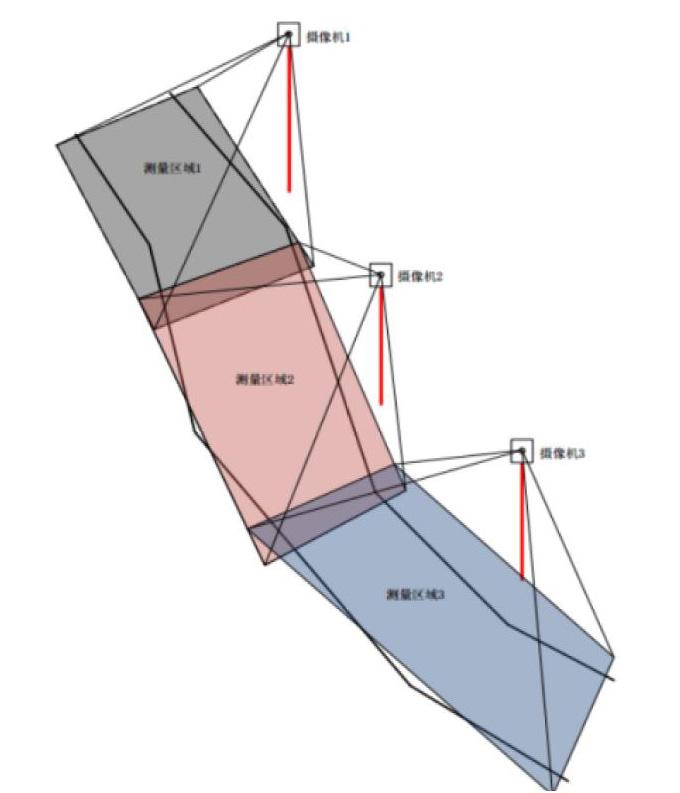
选择上游引航道口门区至船闸引航道及靠船墩等重点研究区域,在航道中心线及系船墩处共布置8个摄像机测试航道流场流速变化过程,物理模型及测量系统布置见图4所示。
3.2引航道流态及流速成果
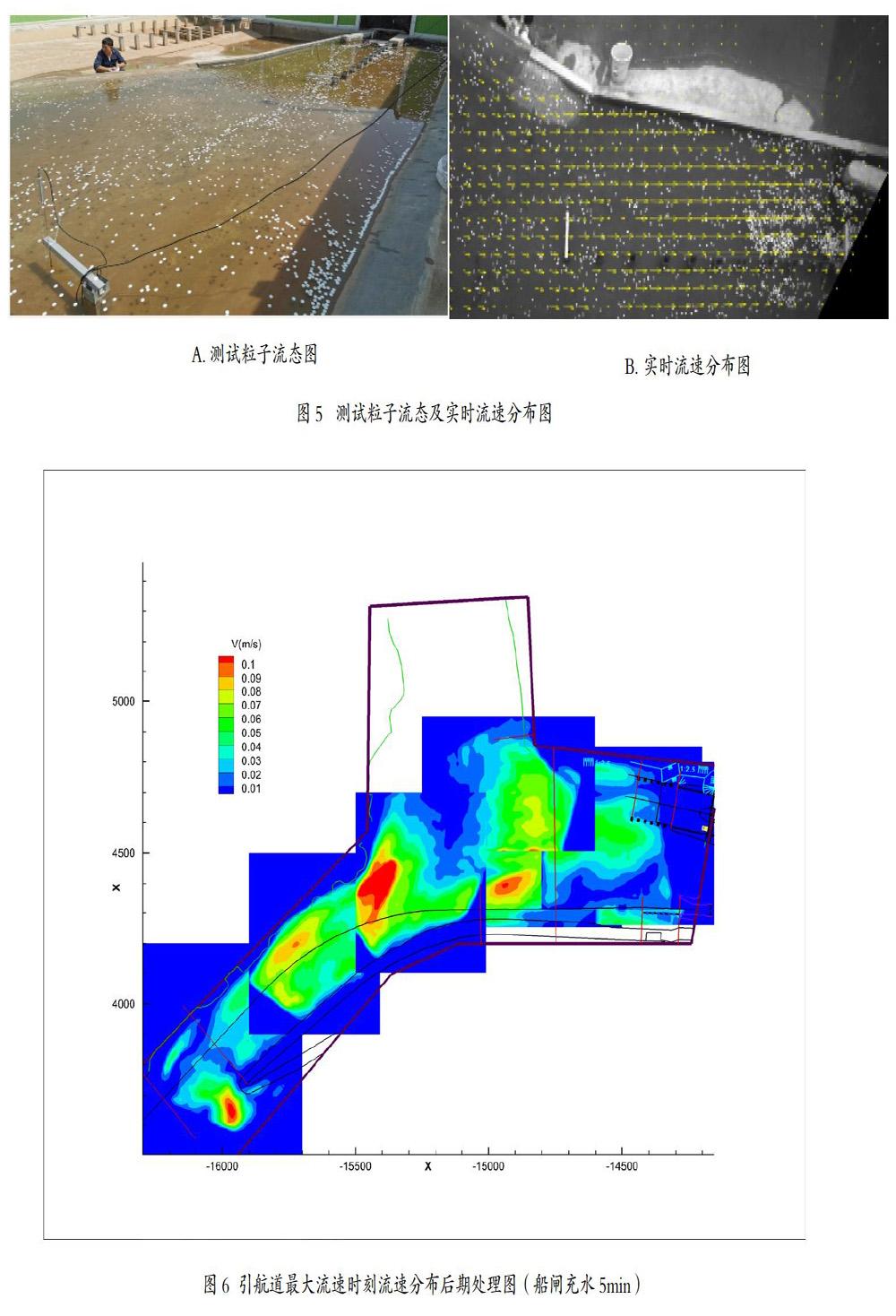
图5为船闸充水过程典型时刻航道表面粒子流态以及实时流速分布。船闸充水起始时段,船闸进水口开始流量增大,水面略有跌落,引航道水体向进水口逐次汇集,随流速增大,在沉箱段与土石围堰结交部位由于存在拐弯而出现较大范围回流区(横向距离围堰40m左右),挤压该区域水流有所偏转,对靠船墩上游区段略有影响;随流速降低,该处回流区逐渐减小;随船闸充水终了,水流由于惯性作用还向船闸涌进,一定时刻之后,水面抬升至最高,水流复向上游回转,由闸首向上游依次转为反向流动,在闸前约600m区段,已处于围堰影响区段之外,反向流已减弱不明显;在反向流动较大时段,沉箱段与土石围堰结交部位复又出现回流区域。其他区域流速不大,水面平稳。
通过非恒定流通航流场测试系统测试航道水流流速分布,后期处理后流速分布成果见图6。
4 结论
结合船闸航道物理模型试验基础条件,研发船闸非恒定流测控系统,包括:非恒定流控制系统以及通航水流流速分布测量系统,实时控制模型水位流量,监测整个试验区段通航水流条件,分析航道的适航性,实现非恒定流流量控制以及通航水流流场测试的自动化,得到高性能存储和处理海量的观测数据,提升通航水力学以及其他相关试验研究的观测能力,取得精度更高、更全面的试验成果,推动一批原创性和高水平的科研成果出炉,拓展通航水力学的研究领域,提高和推动相关科研团队的研究成果质量。
参考文献:
[1]代贤良. 梯级水库非恒定流数值模拟及应用[D].华中科技大学,2015.
[2]金成. 面向明渠运行自动控制的一维非恒定流仿真平台开发[D].清华大学,2015.
[3]孟祥玮. 船闸灌泄水引航道非恒定流研究[D].天津大学,2010.
[4]韩延成. 长距离调水工程渠道输水控制数学模型研究及非恒定流仿真模拟系统[D].天津大学,2007.
[5]林桂宾,张佰战,戴荣尧.桥渡非恒定流水工模型试验研究[J].泥沙研究,2005(06):72-77.
国家重点研发计划项目:《重大水利枢纽通航建筑物建设与提升技术》资助项目(2016YFC0402000)
猜你喜欢
中国水运(2018年4期)2018-06-05
企业文明(2017年5期)2017-05-31
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
科技视界(2016年22期)2016-10-18
科技视界(2016年20期)2016-09-29
珠江水运(2015年16期)2015-10-20
少年科学(2007年12期)2007-02-27
中国三峡建设(2004年5期)2004-01-12
