
PHEV转矩的自适应神经模糊推理系统分配策略
2020-06-20 03:35:52郭翠玲
机械设计与制造 2020年6期
郭翠玲
(商丘职业技术学院机电工程系,河南 商丘 476000)
1 引言
与传统燃油汽车相比,混合动力汽车具有更高的燃油经济性和更低的污染物排放,对缓解环境问题和能源危机具有重要作用。混合动力汽车能量管理与转矩分配决定了车辆的使用成本和尾气组成[1],因此研究混合动力汽车能量管理问题具有重要意义。
混合动力汽车能量管理策略是根据车辆状态和动力源特性,通过分配发动机和电机转矩获得最好的燃油经济性与排放性能。能量管理策略可分为基于规则、基于瞬时优化和基于全局优化三类,基于规则的管理策略通过设定多个门限值划分各部件工作区域,达到提高车辆运行效率的目的[2],此类方法优点是原理简单、鲁棒性强,缺陷是过于依赖工程经验,无法适应工况变化;基于瞬时优化方法以每一控制周期内等效燃油消耗最小为目标,实现瞬时的转矩最优分配[3],例如等效燃油最小法[4]、最小功率损失法等,此类方法优点是可用于实时控制,不受循环工况的制约,缺点是计算量大且难以保证全局最优;基于全局优化方法在全局范围内寻找转矩最优分配方法,包括动态规划[5-6]、线性规划[7]等方法,优点是可以实现真正的全局最优分配,缺点是无法应用于实时控制。
针对并联式混合动力汽车能量分配问题,使用迭代动态规划方法实现了能量最优分配,使用自适应神经模糊推理系统将最优控制律转化为可用于实时控制的控制律,实现了减小燃油消耗和较少尾气有毒气体含量的目的。
2 并联混合动力系统建模与换挡策略
2.1 并联混合动力系统仿真模型
以一款同轴并联混合动力汽车为研究对象,其动力系统结构,如图1所示。从图中可以看出,其动力系统主要由柴油发动机、变速器、动力电池、驱动电机、主减速器等组成[8]。除此之外,系统仿真模型还需建立车辆动力学模型和驾驶员模型。
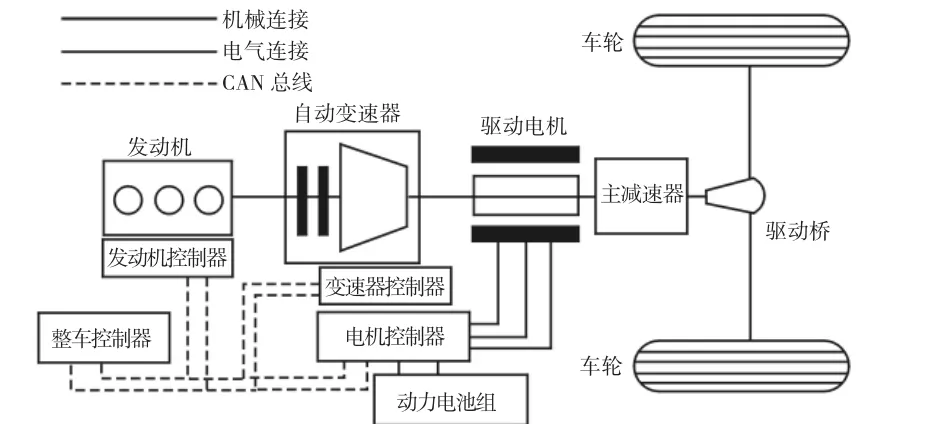
图1 PHEV动力系统Fig.1 Power System of PHEV
(1)发动机模型。使用数值查表法建立发动机模型,通过发动机台架实验,测得发动机在不同转速下的稳态转矩和燃油消耗率,使用插值法建立发动机模型为:

(2)驱动电机模型。动力系统使用电机为永磁同步电机,使用台架实验建立电机模型为 ηm=ψ2(Tm,ωm),式中 ηm为电机工作效率,Tm为电机转矩,ωm为电机转速。驱动电机功率和转矩模型为:

式中:τm—时间常数;Tmd—电机目标转矩;Pmax—电机峰值功率,Tm>0时为电动机模式,Tm<0时为发电机模式。
(3)电池模型。使用Raint模型建立电池模型,根据此模型得到电池电量变化量与输出功率的对应关系为:

式中:S(t)—t时刻SOC值;Ub—电池开路电压;Rb—等效内阻;Qb—电池容量;Pb—电池输出功率。
(4)自动变速器模型。系统使用的变速器为电控机械式自动变速器,变速器起着“减速增矩”的作用,分为5档变速箱,1档为爬坡档,2~5档为“D 档”,后退和空挡分别为“R”和“N”。将换挡过程认为是瞬间完成,建立减速器模型为:

式中:Ta-in—变速器输入轴转矩;Ta-out—变速器输出轴转矩;ηg—变速器传动效率;ig—转速比,是档位 Gear的函数,Gear∈[2,3,4,5]表示前进档位。
(5)主减速器模型。主减速器是具有固定传动比的减速器,起到减速增矩作用,工作过程中齿轮啮合存在相对滑动造成功率损失,主减速器模型为:

式中:Tfd-out—主减速器输出转矩;Tfd-in—主减速器输入转矩;ωfd-in—主减速器输入端转速;ωfd-out—主减速器输出端转矩;i0—传动比;ηfd—传动效率。
(6)车辆纵向动力学模型。车辆在驱动力矩、制动力矩、行驶阻力共同作用下运动,根据牛顿第二定律,有:

式中:Ft—驱动力;Ff—滚动阻力;Fi—坡度阻力;Fw—空气阻力;Fj—惯性阻力。在此给出Ft、Fw、Fj表达式:

式中:Tbrk—制动力矩;Rw—车轮半径;CD—空气阻力系数;A—迎风面积;ρ—空气密度;v—车速;m—整车质量;δ—旋转质量换算系数。
(7)驾驶员模型。使用PID控制建立驾驶员模型,将实际车速与给定车速的误差作为控制器输入,将加速踏板和制动踏板开度作为控制器输出,即:

式中:v(t)—实际车速;vcyc(t)—给定循环工况车速;kp、ki、kd—比例、积分、微分系数;pdriver∈[-1.1]—控制器开度,pdriver<0 时表示制动器开度,pdriver>0时表示加速器开度。
2.2 换挡策略
由自动变速器模型可知,变速器的转速比是档位Gear函数,在此对换挡策略进行明确,进而可以确定变速器的转速比。由于加速踏板开度和车速能够反应驾驶员意图和车辆当前状态,使用此二参数作为换挡依据。根据优化目标不同,换挡策略可分为最佳动力性换挡和最佳经济性换挡,最佳动力性换挡是以牵引力最大为目标,此时车辆尽可能晚地换挡,保证车辆在低档位获得较大的驱动力;最佳经济性换挡是以车辆燃油消耗最小为目标,此时车辆尽可能早地换挡,使用高挡位获得最佳燃油经济性。以3档与4档间切换为例进行介绍,换挡曲线,如图2所示。
以加速踏板开度为0.5为例,3档升4档时,最佳动力性换挡车速vu1小于最佳经济性换挡车速vu2;当4档降3档时,最佳动力性换挡车速vd2大于最佳经济性换挡车速vd1。为了兼顾经济性和动力性,引入系数对换挡车速进行修正,为:

式中:vua、vda—修正后升档和降档车速;λ—修正系数,用于调整动力性和经济性侧重点。

图2 换挡曲线Fig.2 Gear Shifting Diagram
3 能量管理问题建模与求解
3.1 能量管理问题建模
在车辆循环工况已知的情况下,通过合理分配发动机转矩和电机转矩,能够获得最好的燃油经济性和排放性能,因此从本质上讲,混合动力汽车的能量管理问题是一类最优控制问题。
(1)状态转移方程。选择电池SOC作为系统状态变量,即x(k)=S(k),驱动电机转矩作为控制变量,即 u(k)=Tmd(k),根据式(2)和式(3)可变换出状态转移方程,记为:

(2)建立目标函数。设定的优化目标为提高燃油经济性、降低尾气污染物含量,同时还要保证行程结束时电池电量的稳定,因此目标函数由以上3部分组成,即:

式中:J—目标函数;t0、tf—驾驶循环起止时刻;Lc()—燃油消耗代价函数;bCO(t)、bHC(t)、bNO(t)—t时刻尾气中 CO、HC、NO 化合物的排放值;OCO、OHC、ONO—三类化合物的期望排放值,参考GB17691-2005给出;s(t0)、s(tf)—起始时刻和终止时刻电池 SOC 值;α、β、χ、ζ—对应项的优化系数。
发动机燃油消耗率模型通过台架实验建立了查表函数,是非连续模型且占用了较大的存储空间。当发动机转速固定时,燃油消耗率与转矩成近似线性,因此使用二次多项式进行数据拟合,记为:

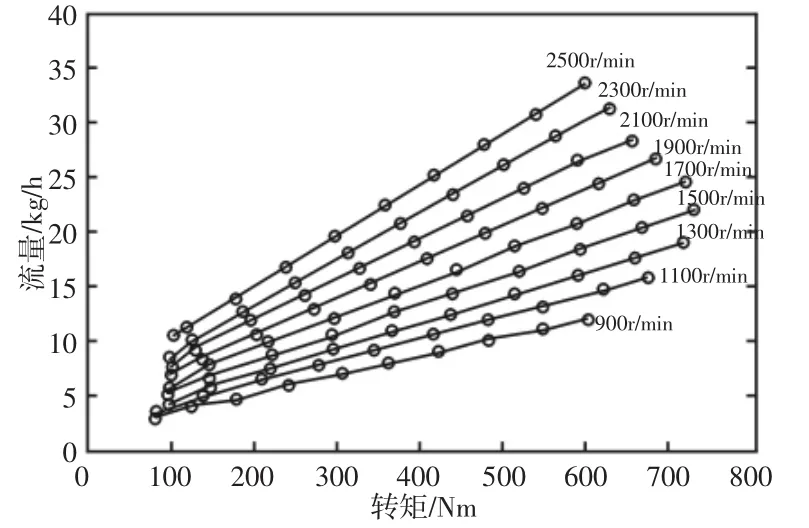
图3 燃油消耗率拟合曲线Fig.3 The Curve of Fuel Consumption After Fitting
不同转速下燃油消耗率的拟合曲线,如图3所示。优化模型的约束条件包括电池电量约束、发动机转矩和转速约束、电机转矩和转速约束,为:

式中:下标max与min—对应项最大值和最小值。
3.2 迭代动态规划求解方法
相比于动态规划算法,迭代动态规划无需求解HJB方程,适用于高维度、非线性控制控制问题,其基本思路[9]为:将控制过程等分为若干时间段,在每个时间段起点上将状态变量网格化离散化,将控制变量代入每个网格点,对比目标函数值,将获得最优目标函数值的状态变量和控制变量进行存储;而后将控制域收缩,重新生成控制量代入网格点计算目标函数值,再次挑选出最优状态变量和控制变量,直至达到最大迭代次数,如图4所示。
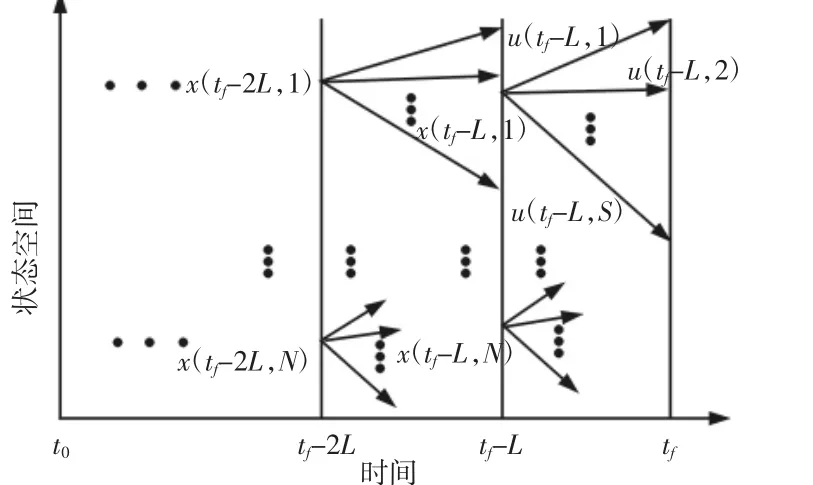
图4 迭代动态规划原理示意图Fig.4 Principle Illustration of Iteration Dynamic Programming
参考图4给出迭代动态规划算法步骤:
(1)时间离散化,即将控制过程在时间轴上进行P等分,每段时长为 L=(tf-t0)/P;
(2)空间离散化。在每个时间段起点上设置一个中心控制变量u0和控制域r,以u0为中心将控制域等分为N份,离散控制变量为u0,…,N-1 式中N取为奇数。根据时间和空间划分,得到了N×P维控制变量矩阵UN×P;
(3)以x0维系统初始状态变量,将控制变量矩阵UN×P施加于系统状态方程,得到状态变量矩阵;
(4)从最后一时间段(即tf-L~tf)开始,在每个状态变量网格点上施加S个控制变量,S为控制变量离散化后的可行值数量,计算每个网格点施加不同控制量的目标函数值,记录使每个网格点的目标函数达到最优的控制变量;
(5)回退到前一时间段(即tf-2L~tf-L),同样的,在每个状态变量网格点上施加S个控制变量,当系统转移状态没有落在网格点上时,选取最优网格点作为转移值,计算每个网格点施加不同控制量的目标函数值,记录使每个网格点的目标函数J达到最优的控制变量;
(6)重复(5)直至回退到t0~t0+L时段,保存每个网格点上取得最优目标函数值的控制变量;
(7)从第1时段开始,依次向最后时段搜索,查找出使当前时段目标函数达到最优的控制变量,记其为当前时段的最优控制变量u*;
(8)控制域收缩,设定收缩因子ϑ∈(0,1),则控制变量可行域r的迭代方法为:

式中:i—迭代次数。
(9)使用(7)中的最优控制量u*代替(2)中的初始控制量u0,并跳转至(2)继续进行迭代,直至算法达到最大迭代次数,输出最后得到的最优控制变量u*。
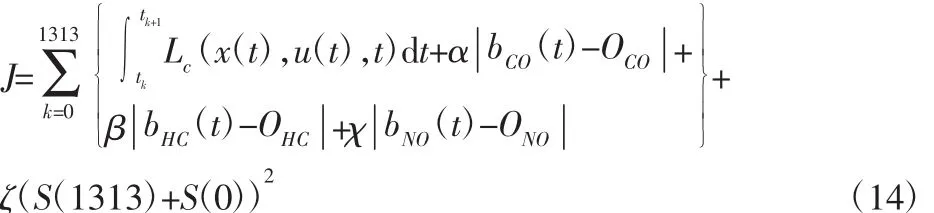
将迭代动态规划算法应用于混合动力汽车能量分配时,需要对目标函数变形,以1314s的CCBC中国典型城市公交工况驾驶循环为例,如图5所示。

图5 中国典型城市公交循环Fig.5 China Typical City Bus Driving Cycle
将1314s的驾驶循环以1s为步长进行划分,则全局目标函数J与第k时间段的瞬时目标函数Jk分别为:
在循环工况已知的情况下,根据汽车动力学方程可计算得到车辆的需求转矩Tdem,使用迭代动态规划求解混合动力汽车能量优化模型,得到驱动电机最优转矩分配值,使用式(15)计算得到发动机最优转矩分配值,此时完成了转矩分配。

4 实时能量管理策略
使用迭代动态规划算法得到的控制律是全局意义下最优,且与时间相关的控制序列,无法应用于车辆实时控制,为了解决这一问题,使用自适应神经模糊推理系统建立最优控制律与车辆状态之间的非线性映射关系,将最优控制律关于时间的关联关系转化为控制律关于车辆状态的关联关系,从而将最优控制律应用于车辆实时控制。
4.1 自适应神经模糊推理系统原理
自适应神经模糊推理系统将神经网络自学习、自适应优点与模糊系统的逻辑推理相结合,常用模糊推理系统有Mamdani型和Sugeno型,考虑到Sugeno型模糊推理系统具有计算效率高、可扩展性强等优点,使用Sugeno型模糊推理系统。自适应神经模糊推理系统具有5层结构,以两输入单输出系统为例,如图6所示。图中方形节点为自适应节点,圆形节点为固定节点。
自适应神经模糊推理系统第一层为输入层,用来对输入变量模糊化,使用的隶属度函数为高斯函数;第二层用来计算对应规则的激励强度;第三层对所有规则的激励强度进行归一化;第四层用来计算每条模糊规则的实际输出值;第五层用来计算模糊推理的结果。每层之间的输入输出关系可参考文献[10],这里不再详细给出。

图6 自适应神经模糊推理系统结构图Fig.6 The Architecture of Adaptive Neuro Fuzzy Inference System
4.2 自适应神经模糊推理系统控制器设计
为了建立最优控制律与车辆状态间的非线性映射关系,接合前文自适应神经模糊推理系统原理,设计控制器。选择车速v、电池荷电状态S、驾驶员需求转矩Tdem、档位Gear作为控制器输入,控制器输出为最优控制律u*(也即驱动电机最优转矩Tm)。
控制器的训练过程与结果严重影响控制器的性能,自适应神经模糊推理系统控制器的训练流程,如图7所示。

图7 训练流程Fig.7 Training Flow
动力电池最佳工作区域为[0.45,0.65],以0.05为间隔,使用迭代动态规划方法分别获得以 SOC=0.45,0.50,0.55,0.60,0.65 为初值情况下的最优控制律,以SOC初值为0.45,0.55,0.60,0.65时为训练样本,以SOC初值为0.5时为测试样本。以均方误差最小为参数训练目标,误差定义为:

经训练后,自适应神经模糊推理系统对测试样本的均方误差值为0.056,说明自适应神经模糊推理系统拟合的最优控制律与车辆状态间非线性映射关系具有较高精度,可以应用于车辆实时控制。
5 仿真验证与分析
使用MATLAB/Simulink软件搭建混合动力系统仿真模型,电池电量初值为0.55,以图5给出的1314s中国典型城市公交循环为验证工况,根据此驾驶循环,依据式(6)和式(7)可计算出车辆的需求转矩Tdem,而后使用迭代动态规划得到驱动电机最优转矩,通过式(15)得到发动机转矩,从而完成转矩分配。将转矩分配结果按照车辆的实时状态施加于车辆仿真模型,得到车速仿真结果与期望车速,如图8所示。
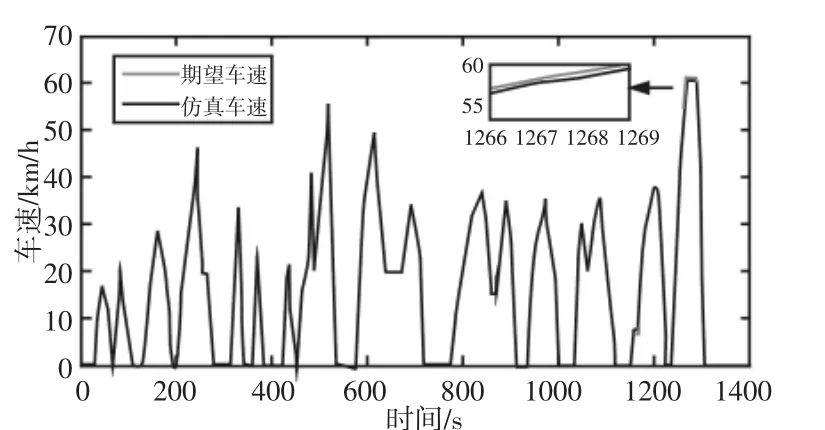
图8 车速跟踪曲线Fig.8 The Vehicle Velocity Tracking Curve
从图8中可以看出,车辆的实际仿真车速与期望车速误差较小,经计算车速偏差最大值为1.89km/h,车速偏差的存在是因为使用自适应神经模糊推理系统对最优控制律与车辆状态进行拟合时必然存在拟合误差。车速偏差较小也说明了使用自适应神经模糊推理系统将与时间关联的最优控制律转化为可实时用于控制的最优控制律是可行的。能量优化后的发动机转速、电机转速、转矩分配结果,如图9所示。


图9 转矩分配结果Fig.9 Torque Distribution Result
由图9(a)可知,发动机几乎全部工作在转速1200rmp以上,避免了发动机工作在低速或怠速状态。由于驱动电机低速大转矩、动态响应快等优点,驱动电机适合工作在低转速区域,对比图5与图9(d),在低转速情况下,驱动电机工作在恒转矩状态为汽车提供全部动力。当车辆制动时,首先使用再生制动,当再生制动不满足制动力要求时使用机械制动,如图中1288s时车辆由60km/h减速,电机转矩为负即工作在发电机模式。以上分析表明设计的控制器控制过程合理,符合车辆驾驶规律。
为了进一步验证能量管理策略的优越性,分别使用这里方法、基于规则的能量管理方法、等效燃油消耗最小控制策略、迭代动态规划法等四种方法对混合动力进行控制,其在迭代动态规划方法是无法应用于实时控制的全局最优规划方法,以此方法规划结果作为参考。四种方法得到的百公里燃油消耗量和尾气排放结果,如表1所示。

表1 不同方法控制结果Tab.1 Control Result of Different Method
从表1中可以看出,1314的CCBC工况最佳百公里油耗参考值为24.28L,使用这里的控制方法油耗为25.19L/100km,比参考值增加了3.75%;而基于规则控制策略和等效燃油消耗最小的百公里油耗分别为29.87L、26.18L,比控制方法分别增加了18.56%、3.93%。另外,控制方法的三类有害气体排放量也明显小于另外两种方法,充分证明了设计的控制方法能够有效进行转矩分配,达到节省油耗和减少有害气体排放的目的。这是因为使用迭代动态规划方法得到了最优控制律,即转矩最优分配方案,而后使用自适应神经模糊推理系统探索最优控制律与车辆状态间的非线性关系,实时了最优控制律的实时控制。控制方法之所以与真实的最优控制还有一定差距,这是由自适应神经模糊推理系统的拟合精度导致的。
6 结论
研究了并联式混合动力汽车的能量分配问题,提出了迭代动态规划与自适应神经模糊推理系统相结合的能量分配方法,经过验证得出了以下结论:(1)迭代动态规划方法可以实现混合动力汽车能量的最优分配;(2)使用自适应神经模糊推理系统探索最优控制律与车辆状态关系,可以将最优控制律应用于实时控制。
猜你喜欢
小哥白尼(野生动物)(2021年3期)2021-07-21 02:28:38
数学年刊A辑(中文版)(2021年1期)2021-06-09 09:32:02
数学物理学报(2019年3期)2019-07-23 01:15:38
数学物理学报(2018年3期)2018-07-17 06:15:30
汽车维护与修理(2018年1期)2018-04-04 01:13:22
通信电源技术(2016年4期)2016-04-04 02:57:30
汽车维护与修理(2015年6期)2015-02-28 12:17:16
汽车维护与修理(2015年5期)2015-02-28 12:16:34
汽车维护与修理(2015年2期)2015-02-28 12:15:44
汽车维护与修理(2015年2期)2015-02-28 12:15:42
