
六旋翼机器人运动控制与跟踪控制研究
2020-06-20 03:36:18黄春耀马亮静
机械设计与制造 2020年6期
黄春耀 ,王 超 ,马亮静
(1.龙岩学院机电工程学院,福建 龙岩 364000;2厦门大学机械工程与自动化学院,福建 厦门 361005;3.龙岩技师学院电气工程系,福建 龙岩 364000)
1 引言
近年来,多旋翼机器人得到了广泛的关注和应用,在民用领域,如灾难监测、航空摄影、输电线路检查、人工搜索、救援、远程检查和监视等操作相比,六旋翼机器人具有巨大的优势[1-4]。未来六旋翼机器人将能够执行制图、摄影测量、监视、监测、检查或运输等任务,多旋翼直升机能够在保持飞行稳定的同时承载有效载荷[5-6]。这种附加载荷可能会显著改变飞行器的重量分布和飞行动态性能。尽管在权重、惯性矩阵、动力学等知识上存在不确定性载荷本身,但依靠跟踪控制飞行控制对多旋翼机器人的安全运行有一定改进的,特别是在城市地区。此外,多旋翼无人机对提高飞行安全性是一个很有吸引力的课题热点,因为尽管存在某些电机故障,仍然可以保持一定的稳定性。
无人机分为两类,固定翼和旋转翼。旋翼式无人机分为:多旋翼型(四旋翼和六旋翼)、同轴直升机和传统直升机等[7]。在实际操作中,固定翼的无人机已在常规监视任务中使用多年,但它们缺乏悬停飞行能力[8]。因此,旋翼式的无人机主要研究重点是提供垂直起降、全方位飞行和悬停性能。其中四旋翼的机械结构最为简单,其简单的设计和相对低成本的特点使其成为一个有吸引力的研究领域。然而,四旋翼也有一些潜在的缺陷,如较小的有效载荷能力,缺乏硬件冗余和反侧风能力。为此,介绍了一种由六个旋翼组成的六旋翼无人机的混合结构,以解决四旋翼的上述问题。
1.1 机构特点
众所周知,六旋翼的动态不稳定性,只要简单地处理几个系统参数就可以提高稳定性[10]。六旋翼机器人与四旋翼机器人相比具有以下特点:
(1)有效载荷能力增强。通过实际飞行试验,六旋翼无人机的有效载荷能力约为0.9kg,是所有机械尺寸相同的四旋翼飞行器中最大的。
(2)增加稳定性。六旋翼无人机重量约1700克,增加了6个反向旋转转子的推力,使其在大风条件下更加稳定。六旋翼无人机的较大尺寸和重量使其成为一种非常稳定的无人机飞行。
(3)硬件冗余和容错。六旋翼无人机在旋翼部分损坏的情况下仍能保持稳定飞行。当一个或两个转子发生故障时,具有故障诊断和容错功能的飞行控制器可以立即进行故障诊断和容错飞行控制,其他转子将补偿由于转子损坏而降低,以保持六旋翼无人机的稳定性。它能有效地提高无人机的可靠性和安全性,降低飞机坠毁的概率。对于四旋翼,在上述情况下不可避免地会发生碰撞。
1.2 系统设计
旋翼机器人通过给定螺旋桨的实验特性,可以估计要求的推力和阻力系数。对于六旋翼的特殊情况,经验法则将最佳推力重量比固定为2:16。那么,对机体和航空电子质量的粗略估计是必要的,以便首先估计没有电池的总质量。后者通过迭代算法找到。

图1 六旋翼无人机的结构及相关框架Fig.1 The Structure of Six-Rotor UAV and the Associated Frames
六旋翼无人机的结构及相关框架,六旋翼无人机的旋转动力学满足严格的反馈形式,可以采用反推技术来设计姿态控制器,如图1所示。然而,虚拟控制变量的解析导数表达式往往过于复杂或未知,特别是对于不确定系统,这限制了反演技术在实际应用中的局限性。为了克服这一缺点,在不分析计算虚拟控制信号导数的情况下提取理想的角速率微分命令信号,降低了对分析模型的依赖程度。姿态控制器的鲁棒项可以减小扰动重构误差对六旋翼无人机跟踪能力的影响。最后,通过各种仿真实验验证了所提出轨迹跟踪策略的有效性。根据六旋翼无人机的结构及相关框架,给出了六旋翼无人机的详细数学模型。提出了鲁棒轨迹跟踪控制策略。对六旋翼无人机轨迹跟踪仿真结果进行了比较和讨论。最后,给出了鲁棒轨迹控制策略的结论。
2 六旋翼运动控制
2.1 本体数学建模
为了简化六旋翼无人机的建模过程,使控制器的设计更加简单,提出了几个合理的假设。
假设1:六旋翼无人机是刚性的。利用牛顿—欧拉公式可以导出非线性动力学方程。
假设2:六旋翼无人机相对于ox、oy和oz轴对称。
假设3:忽略六旋翼无人机旋翼与飞机之间的高度。
首先,需要对两种框架进行减振:一种是本体固定框架(B-frame)和一种对地惯性框架(E-frame)。设 B={oxyz}为原点 o 为六旋翼无人机质心的本体固定框架,E={ogx,gy,gz}为本体固定框架,如图2所示。因此,在假设3下,可以对六旋翼无人机的结构进行简化。

图2 六旋翼无人机结构简单Fig.2 The Simple Structure of Six-Rotor UAV
图中:l1—OB 的长度;OE、l2—AM、DM、CN、FN 的长度;l3—OM 和ON的长度;α—AM和OM的夹角。
2.2 四旋翼运动控制
在多旋翼直升机的情况下,控制分配包括计算每个螺旋桨转速,以产生所需的总推力T和力矩,分别为横摇、俯仰和偏航、L、M、N。考虑一个有n个旋翼的直升机的实际情况,其中每个电机的i(i=1,2,…,n)。

很容易验证:Tmin≤T≤Tmax
下面的系数μ和κ(使用)描述螺旋桨的效率产生推力和偏航力矩,臂长是l。对于图3(a)的四轴飞行器,需要计算四个电机转速。螺旋桨转速与矢量v之间的映射矩阵A,如式3所示。控制分配是通过计算矩阵的逆,这样吩咐螺旋桨速度计算Ωc=A-1vc。
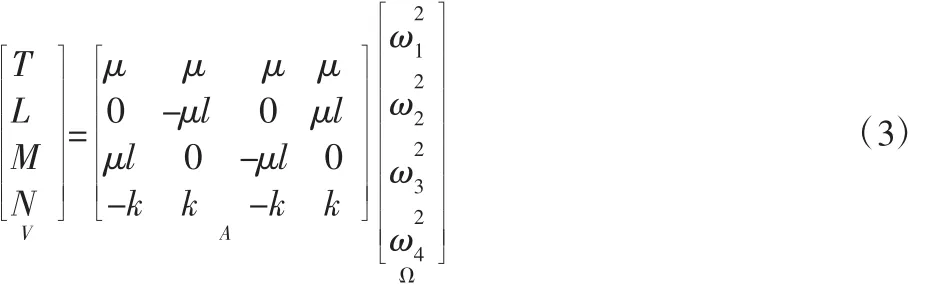

图3 多旋翼直升机配置Fig.3 Multi-Rotor Helicopter Configurations
2.3 六旋翼运动控制
对于图3(b)的六轴飞行器,需要计算六个电机转速。六轴飞行器的总推力T和扭矩控制输入L,M和N通过以下等式与六个电动机的速度相关:

3 鲁棒轨迹跟踪控制策略
为了对提出的鲁棒轨迹跟踪控制策略有一个清晰的认识,控制框图,如图4所示。外环控制器采用PID控制方法,将六旋翼无人机的期望轨迹与实际位置进行比较,并与内环建立期望姿态角。在内环中,设计了一种基于扰动补偿鲁棒姿态控制器。

图4 鲁棒轨迹跟踪控制策略框图Fig.4 Block Diagram of the Robust Trajectory Tracking Control Strategy
3.1 控制方法
定义由式给出的平移动力学的位置跟踪误差pe为:

其中向量 pc=(xc,yc,zc)T是期望的光滑轨迹。滑模误差函数定义如下:

∧在哪一个对角线积极定设计参数矩阵。那么,是一个稳定的系统,使得pe有界为只要控制器保证频闪误差r是有界的。事实上,很容易看出一个人有:

3.2 旋转控制
为姿态角响应(实线)和跟踪不同参考轨迹所需的姿态角(虚线),如图5所示。在引入微扰参数的情况下,采用线性微分与非线性微分相结合的方法减弱微分估计的抖振,在提出的微分器鲁棒性下,将微扰参数引入非线性项,并利用带微扰参数的线性项来加快微分器的收敛速度,抑制高频噪声干扰。

图5 姿态角响应(实线)和跟踪不同参考轨迹所需的姿态角(虚线)Fig.5 Attitude Angles Response(Solid Line)and the Desired Attitude Angles for Tracking the Di Erent Reference Trajectory(Dashed Line).
4 飞行实验
为了对提出的鲁棒轨迹跟踪控制策略有一个清晰的认识,控制框图,如图4所示。
4.1 飞行实验
实际六旋翼机器人进行的飞行实验,可以看出,该六旋翼飞行器可以实现在高空中的稳定飞行效果,运动控制算法有很好的鲁棒性,如图6所示。

图6 实际飞行实验图Fig.6 Actual Flight Test Diagram
4.2 响应实验
瞬态响应和稳态响应,可以看出鲁棒轨迹跟踪控制的有效性,如图7所示。

图7 仿真:PID控制器稳定姿态Fig.7 Simulation:The PID Controller Stabilize the Attitude
实际飞行轨迹(实线)和期望飞行轨迹(虚线)的三维。可以看出,该六旋翼飞行器实际上具有很好的跟踪控制效果,如图8所示。
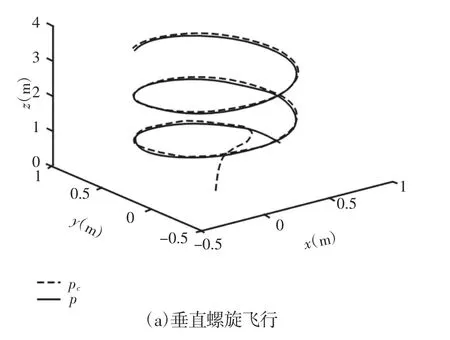
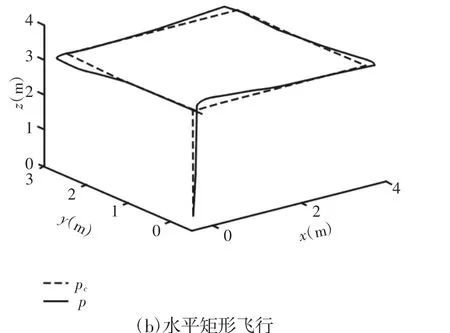
图8 实际飞行轨迹(实线)和期望飞行轨迹(虚线)的三维图Fig.8 The 3D Diagram for Real Fight Trajectory(Solid Line) and Desired Trajectory(Dashed Line)
5 结论
针对四旋翼无人机的有效载荷能力较小、硬件冗余不足、抗侧风能力不足等问题,设计了六旋翼无人机的飞行控制器,建立了一种新型六旋翼无人机及其数学模型。展示了多旋翼直升机飞行控制系统的新发展。六旋翼无人机的主要特点是有效载荷能力的提高和在强风的环境下稳定性。六旋翼和螺旋桨对称地分布在机身两侧,六旋翼无人机的结构类似于昆虫。在多旋翼无人机的飞行控制系统的性能在很大程度上取决于控制分配策略。它包括计算每个电机的转速,在俯仰,偏航和横滚从而产生所需的推力和力矩。线性化后的映射方程可改写为约束线性控制分配问题的标准公式[9-10]。其次,设计了一种鲁棒轨迹跟踪控制策略,使六旋翼无人机能够精确地跟踪目标轨迹。针对六旋翼无人机欠驱动和强耦合的特点,提出了一种新型的六旋翼无人机闭环控制方案。未来的工作涉及(1)将控制分配方法扩展到具有n>6个螺旋桨的多转子;(2)螺旋桨产生推力的效率的在线识别;(3)处理控制重新分配的问题。仿真结果验证了该方法的正确性和有效性。所提出的轨迹跟踪控制策略能够使六旋翼无人机以令人满意的方式跟踪所期望的轨迹。实际飞行中允许最大轨迹跟踪误差不超过0.2m。
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01 06:28:34
军民两用技术与产品(2021年12期)2021-03-09 05:38:22
航天工业管理(2020年3期)2020-07-25 01:36:30
航空发动机(2020年3期)2020-07-24 09:03:16
自动化学报(2019年6期)2019-07-23 01:18:18
自动化学报(2017年4期)2017-06-15 20:28:54
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:42
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:20
广东造船(2015年6期)2015-02-27 10:52:46
中国舰船研究(2014年1期)2014-05-14 06:40:47
