
适用于机场跑道异物检测的区域生长改进算法
2020-06-19 07:50郑浪罗天洪王成琳何泽银李忠涛
现代电子技术 2020年9期
郑浪 罗天洪 王成琳 何泽银 李忠涛


(1.重庆交通大学 机电与车辆工程学院, 重庆 400074; 2.重庆文理学院 智能制造工程学院, 重庆 402160)
摘 要: 检测机场跑道异物对飞机安全起飞着陆具有重大的意义。为此,文中提出一种适用于机场跑道异物检测的改进区域生长算法。提出的算法在对机场跑道图像进行区域种子点选择的基础上,以其為中心,进行8连通区域生长;采用Sobel算法对区域生长后的图像进行边缘增强;以颜色相似、区域相邻及吞噬小面积区域三要素为准则,融合特征相似区域,从而得到目标分割图像。利用所提算法对所测试异物的识别率分别达到91.7%和93.8%,表明提出的算法能准确地分割机场跑道异物区域,并能有效地抑制背景干扰,成功地解决了传统区域生长算法产生的过分割问题。
关键词: 改进区域生长算法; 异物检测; 机场跑道; 区域合并; Sobel算法; 图像分割
中图分类号: TN911.1?34; TP242. 6+2 文献标识码: A 文章编号: 1004?373X(2020)09?0051?04
Improved region growth algorithm applicable to detection
of foreign object debris on airport runway
ZHENG Lang1, LUO Tianhong2, WANG Chenglin2, HE Zeyin1, LI Zhongtao1
(1. School of Mechanotronics & Vehicle Engineering, Chongqing Jiaotong University, Chongqing 400074, China;
2. School of Intelligent Manufacturing Engineering, Chongqing University of Arts and Sciences, Chongqing 402160, China)
Abstract: The detection of foreign object debris (FOD) on airport runway is of great significance for aircrafts to take off and land safely. For this reason, an improved region growth algorithm applicable to FOD detection on airport runway is proposed. In the algorithm, the regional seed point of the airport runway image is selected and taken as the center to perform 8?connected region growth. The Sobel algorithm is adopted to enhance the image edge after the image is subjected to region growth. Regions with similar features are fused on the basis of the criteria of similar colors, adjacent regions and swallowing small regions to obtain the target segmentation image. The recognition rates of FOD obtained with the proposed algorithm are 91.7% and 93.8% respectively, which shows that the algorithm can accurately segment the FOD region of airport runway and effectively suppress background interference. Therefore, it successfully deals with over?segmentation occurred in the application of the traditional region growth algorithm.
Keywords: improved region growth algorithm; FOD detection; airport runway; region merging; Sobel algorithm; image segmentation
0 引 言
随着经济的快速发展,交通出行方式不断增加,在所有交通工具中,以飞机出行的方式备受人们的青睐。然而,在飞机起飞和降落时,机场跑道上的异物(Foreign Object Debris,FOD)很可能被吸进飞机发动机内,造成发动机故障,也有可能扎坏飞机的轮胎,进而构成严重的事故[1]。因此,检测机场跑道异物是整个机场飞机高效安全飞行必须解决的一个关键问题[2]。
近年来,机器人视觉成为了研究热点,人们针对目标图像分割提出了很多研究方法[3]。要良好实现目标识别,准确的图像分割很关键。图像分割的方法大致分为:边缘检测、区域分割和阈值分割。区域生长算法易受噪声的影响,在分割结果图中易留下噪点,解决这类问题,通常需先对原图像进行滤波处理,经过滤波处理后容易造成边缘模糊问题和形成空洞两个问题。一般采用图像闭操作处理这类问题。文献[4]针对混凝土切片CT图像亮度分布不均问题,采用环形分区与区域生长的分割算法,提高了图像阈值分割的准确性;文献[5]为准确分割肺部CT图像,提出一种区域生长与水平集相融合的图像分割法,用经典区域生长方法初步定位肺部边界,再使用水平集融合方法分割,有效地降低了肺部边缘轮廓的漏检率。文献[6]针对医学图像提出一种多尺度区域生长算法,该方法针对噪声具有较强的鲁棒性,但是区域生长方法缺少通用性,并不通用于各个领域。
除了本文中提到的研究者外,还有很多科研人员在其他领域采用区域生长法对图像进行分割,但是还仍未见有学者对FOD图像运用基于区域生长算法进行分割识别。因此,本文提出一种适用于机场跑道异物检测的改进区域生长算法,通过改进区域生长准则,对过分割区域按融合三要素法则进行合并,得到FOD的准确分割图像。
1 改进区域生长算法
1.1 传统区域生长
传统区域生长算法是由Zucker提出的一种半自动化的图像分割算法,主要将图像分割成若干个相似的区域。区域生长算法的核心思想是:将特征相似或相同的像素分割到同一个区域内,完成图像的分割[7]。具体步骤为:对分割图像进行种子点选择,以种子点为中心,将种子点的邻域中与种子点有相似或相同特征的像素合并在同一个区域中,再以新合并到区域中的像素作为种子点进行区域生长,直到没有符合区域生长准则的像素点可以进行生长为止。传统区域生长算法有初始化简单、执行速度快、生长终止易控制等优点。
1.2 改进区域生长算法
改进区域生长算法基本原理:首先确定每个区域中的某个已知点,加上与已知点相似的邻近点形成一个区域,在这里利用区域的均值。当邻近点与区域均值的差值的绝对值小于阈值[T]时,即满足生长条件。方法是从种子点开始,在8连通方向上生长区域,当其邻近点满足生长条件,则并入相似点目标区域,当新的点被合并后再用新的区域重复这一过程,直到没有可接受的邻近点时该区域生成过程终止。
1.2.1 种子点的选择
改进区域生长算法的种子点选择准则满足式(1)要求:
[f(i,j)=q & Cut(i,j)=250, q∈[Imin,Imax]] (1)
式中:构建初始图像,图像的像素值均为[Cut(i,j)]=250;[Imin,Imax]分别为机场跑道二值化图像最小像素值和最大像素值;[q]值从最小依次取到最大,区域生长一次,生长图像[Cut(i,j)]像素值更新一次。
1.2.2 生长准则
基于区域生长算法,图像分割的关键问题在于准确确定生长准则。生长准则直接影响图像分割的效果。本文针对机场跑道图像提出一种改进区域生长算法的生长准则,其方法如式(2),式(3)所示:
[ave=1nf(u,v)] (2)
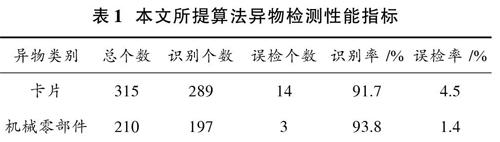
[ΔH=f(i,j)-sum 式中:區域生长方式采用邻域区域,[n=8];[f(u,v)]为种子点[(i,j)]周围邻域像素点的灰度值;[ave]为种子点邻域区域像素点灰度均值。 1.2.3 区域合并 对原图像采用改进区域生长算法进行分割后,过分割问题未得到彻底解决,为了准确分割出目标图像,需要进一步对区域生长图像进行区域合并。在此阶段需要不断地将相邻区域按区域优先级进行合并,直到每个区域的像素个数不超过阈值[N]。下面详细介绍区域合并的规则: 1) 颜色合并优先级 基于生物视觉系统对视觉信号微弱差别比较敏感,普遍认为同一对象的图像颜色相似度概率较大,可利用颜色直方图的巴氏距离对图像区域之间的关系进行数值化处理。颜色合并优先级采用式(4)计算: [Pk(m,n)=1-D(m,n)] (4) 式中:[D(m,n)]是区域[m,n]在[L×a×b]空间的像素均值巴氏距离度量函数[8]。为了提高计算效率,采用文献[9]所提算法,在保证全部覆盖目标区域的情况下,去掉图像中颜色出现概率低的区域。 2) 区域相关性优先级 区域相关性是指相邻区域在三维空间中的相关联程度,计算相邻区域[m,n]相关性可采用式(5)计算: [Pl=GL(m,n)max(L(m),L(n))] (5) 式中:[GL(m,n)]为区域[m,n]的公共边界长度;[L(m),L(n)]为区域[m,n]的边界长度;[Pl]值越大表示两区域相似度越高,合并优先级更高。 3) 面积合并优先级 针对图像全局区域,优先合并相邻区域面积小的区域,对小面积区域定义优先级[Ps]: [Ps=S-(S(m)+S(n))S] (6) 式中:[S]为整个机场跑道图像面积;[S(m),S(n)]为局部区域[m,n]的面积。 综合以上三种区域合并优先级,按一定权重进行融合,融合准则如下[10]: [P=i?Pk+j?Pl+k?Ps] (7) 式中:[i=0.5];[ j=0.3];[k=0.2]。 1.3 改进区域生长算法步骤 改进区域生长算法步骤具体如下: 步骤1:根据机场跑道异物图像直方图,确定阈值[T]; 步骤2:对机场跑道图像像素以小到大依次排序,以选定的区域生长种子点[f(x,y)]进行区域生长: [Threshold=f(i,j)-f(x,y)≤T] [ave=f(i,j)] 步骤3:继续用种子点邻域为生长方向,以邻域中的像素点为种子,将满足生长条件的点合并到目标区域中,更新分割区域: [ave=1kkf(i,j)Threshold=f(i,j)-ave≤T] 步骤4:重复以上步骤,直到不再有符合存在邻近满足生长条件的点为止,该区域生成过程结束,得到分割后的图像Cut; 步骤5:图像Cut存在过分割现象,对Cut图像按区域吞噬准则[T1]进行合并,最后得到FOD准确分割图像。 2 仿真实验结果 为验证本文所提算法对机场跑道异物图像分割的有效性,在Windows 10系统下使用Matlab 2014a对路面异物图像进行仿真实验。用尼康D3300相机对路面上的异物进行拍摄,得到路面的原始图像代替机场跑道异物图像。为缩短仿真实验时间,首先对拍摄图像进行缩放,得到大小图像,使用本文提出的种子选择准则、区域生长条件和区域合并准则进行实验,取阈值[T=25],得到准确分割异物图像。 2.1 本文所提算法识别结果 本次实验收集7张学生门禁卡、机械零部件作为识别对象,运用本文所提算法进行了三组仿真实验,实验识别结果如图1~图3所示。图1a),图2a),图3a)为机场跑道原始采集图像;图1b),图2b),图3b)为原始图像经过区域生长后的图像Cut;图1c),图2c),图3c)为图像Cut经过图像边缘增强,二值化处理后的结果图,从结果图中可以直观地看出图像仍然存在过分割现象。本文将过分割图像进行区域合并,得到结果如图1d),图2d),图3d)所示,从结果图中可以清楚看出本文算法准确分割出路面上的目标异物。 本次实验对有525个异物目标的机场跑道图像进行了检测分割,图像分别是在天气晴朗的正午与下午和阴天的情况下拍摄所得,异物目标随机分布,其中,机场异物分别由315个卡片异物与210个机械零部件组成,识别率分别为91.7%和93.8%,误检率分别为4.5%与1.4%,具体检测性能指标见表1。 2.2 本文算法与其他方法对比 为了更准确地验证本文所提算法的有效性,针对经典区域生长算法易出现过分割现象,将本文所提算法与经典区域生长算法和一般彩色图像分割算法[11]进行对比,结果如图4所示。 传统区域生长算法采用手动选择种子点,能够分割出机场跑道异物图像,但是只能分割连续区域,故从图4第四列图像可以看出,经典区域生长算法均只能识别出离散分布异物中的一个异物目标;一般彩色图像分割算法能够识别出机场跑道上的异物,但是识别出的结果图还有很多噪点,对后续目标识别等研究会产生影响;本文所提改进区域算法能够准确分割出机场跑道上异物目标,比其他两种算法更加适用于机场跑道异物检测环境。 为了更加客观地说明本文所提算法的有效性,可以在识别率,误检率两个性能指标方面对本文所提算法、传统区域生长算法(Traditional Region Growth Algorithm,TRGA)与一般彩色图像分割算法(General Color Image Segmentation Algorithm,GCISA)进行对比,结果对比如表2所示,结果表明,一般彩色图像分割算法识别率、误检率与本文所提算法相差不大,是传统区域生长算法的6倍左右。 3 结 论 本文针对机场跑道大部分区域背景颜色相同的特征,设计了一种新的区域生长方法。为了实现准确分割FOD的需求,提出了一种适用于机场跑道的区域生长改进算法。仿真结果表明,本文提出的改进区域生长算法可以依据图像特征不同选取合适的阈值,能够准确地分割机场跑道上的异物,异物的识别率分别高达91.7%和93.8%,相比于现有彩色图像分割算法与传统区域生长算法,可以有效地抑制背景干扰,为后续目标实时检测的深入研究奠定了理论依据。 参考文献 [1] FAA. AC 150/5220?24?airport foreign object debris (FOD) detection equipment [EB/OL]. [2009?09?30]. https://www.faa.gov/airports/resources/advisory_circulars/index.cfm/go/document.current/documentNumber/150_5220?24. [2] XU Haoyu, HAN Zhenqi, FENG Songlin, et al. Foreign object debris material recognition based on convolutional neural networks [J]. EURASIP journal on image and video processing, 2018(1): 21. [3] PENG B, ZHANG L, ZHANG D. A survey of graph theoretical approaches to image segmentation [J]. Pattern recognition, 2013, 46(3): 1020?1038. [4] 王杭,李宗利,商玉娟,等.基于环状分区和区域生长的混凝土CT图像分割[J].人民长江,2017,48(23):89?93. [5] 唐思源,杨敏,苗玥,等.区域生长和水平集相融合的肺部CT图像分割[J].电子技术应用,2018,44(5):129?133. [6] 肖明尧,李雄飞,张小利,等.基于多尺度的区域生长的图像分割算法[J].吉林大学学报(工学版),2017,47(5):1591?1597. [7] 曹建芳,李艷飞,崔红艳,等.改进区域生长算法在寺观壁画脱落病害标定中的应用[J].新疆大学学报(自然科学版),2018,35(4):429?436. [8] ZHAI Y, SHAH M. Visual attention detection in video sequences using spatiotemporal cues [C]// Proceedings of the 14th ACM International Conference on Multimedia. Santa Barbara, USA: ACM, 2006: 815?824. [9] CHENG M M, ZHANG G X, MITRA N J, et al. Global contrast based salient region detection [J]. IEEE transactions on pattern analysis and machine intelligence, 2019, 37(3): 569?582. [10] 孙丰,秦开怀,孙伟,等.基于区域合并的图像显著性检测[J].计算机辅助设计与图形学学报,2016,28(10):1679?1687. [11] 徐蔚波,刘颖,章浩伟.基于区域生长的图像分割研究进展[J].北京生物医学工程,2017,36(3):317?322.
猜你喜欢
建材发展导向(2022年14期)2022-08-19
成都信息工程大学学报(2021年5期)2021-12-30
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年24期)2016-11-14
电脑知识与技术(2016年24期)2016-11-14
电子科技大学学报(社科版)(2015年2期)2015-07-18
电子设计工程(2015年3期)2015-02-27
河南科技(2014年24期)2014-02-27
中国工程咨询(2011年2期)2011-02-13
