
基于PCS7 的过程仿真及控制实验设计
2020-06-18 04:06禹万泓
实验室研究与探索 2020年3期
向 欣, 王 卓, 禹万泓
(华中科技大学人工智能与自动化学院,武汉430074)
0 引 言
“过程控制系统”和“集散控制系统”是自动化专业本科的必修课。过程控制系统从传统的过程检测控制仪表正逐步往集成化和网络化方向发展,集散控制系统已经发展成为工业过程生产自动控制装置的主流技术装备。为加深学生对过程控制理论知识的了解,将广泛应用于工业自动化现场的集散控制系统引入过程控制系统实验,实现学生实验与工业生产实际接轨,提高学生的工程实践能力,为培养卓越工程师奠定基础[1]。为锻炼学生的动手能力,培养学生将书本上的控制方法应用到实际工程方案中,实现复杂的控制方案,必须要给学生提供复杂的被控对象和较高的控制要求。因安全和经费等因素,包含温度、组分和压力等被控参数的真实复杂过程对象很难在实验室中搭建起来。本文基于复杂实验对象建立数学模型[2],并在PCS7 系统上采用连续功能图(Continuous Function Chart,CFC)搭建实验仿真模型对象[3]。不仅让学生充分了解复杂过程对象数学建模的方法,并通过控制方案的设计和实现过程,让学生掌握PCS7 硬件组态、控制回路的设计和控制参数的调整;针对复杂过程对象,不仅能实现简单回路的控制,也能实现各种复杂控制。
该实验内容在培养计划中安排为“过程控制综合实验(II)”,24 学时,是为本学院自动化专业大三学生开设的一门独立实验课程,实验效果良好。实践证明该设计与教学方法锻炼了学生的工程实践能力,提高了过程控制系统的实验教学效果。
1 实验教学内容
(1)学生根据实验指导书提供的对象介绍充分了解被控对象的工艺过程,了解对象模型的实现原理和方法,根据实验提出的控制要求,制定总体控制方案[4-5]。
(2)用SIMATIC MANAGER 软件创建工程项目实现自动化站AS和工程师站ES与操作员站OS构成的最小系统,完成硬件组态与网络组态。
(3)在CFC 编辑器中完成针对对象模块的控制设计任务,启用PLCSIM 仿真AS 站,将设计好的程序编译下载到AS站。
(4)编译、设计OS站及图形界面。
(5)设计SFC,实现顺序控制功能的开车和停车。
(6)在OS 站启动运行程序检验控制功能与效果。
2 仿真对象设计
2.1 加热箱对象介绍
2.1.1 被控对象描述
构建带搅拌器的加热箱系统[6-7]结构如图1 所示。
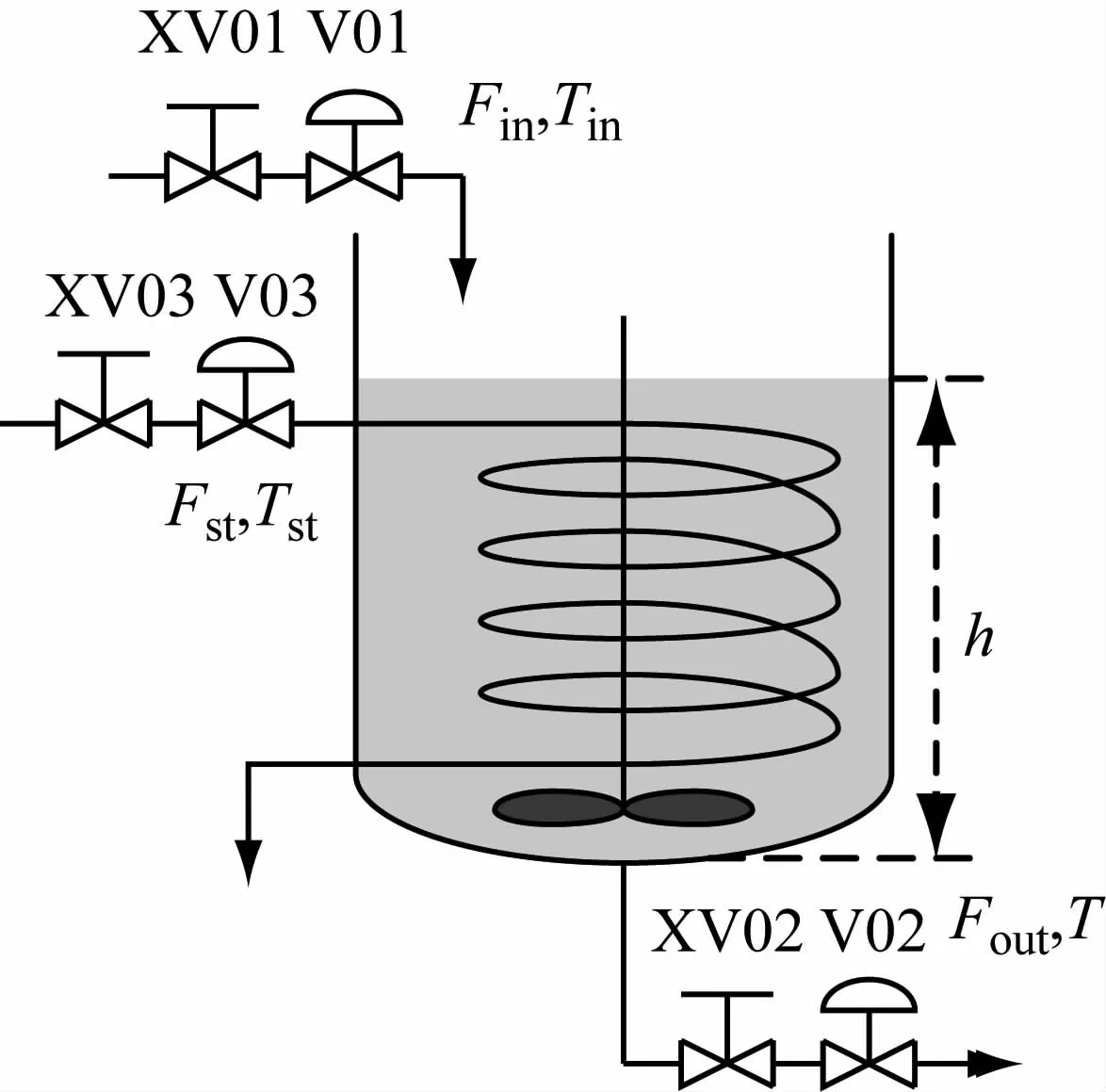
图1 加热箱系统结构图
冷物料由进料调节阀V01 进入加热箱,当液位h达到一定高度时,打开蒸汽加热阀V03,将温度加热到一定温度,打开出水阀调节阀V02,保持生产负荷Fout恒定,使加热箱液位、流量和温度自动控制在生产要求的稳定范围。
2.1.2 数学模型
本文构建的加热箱模型基于连续反应釜(Continuously Stirred Tank Reactor,CSTR)模型,其数学模型[6]为:

式中:ρ为物料的比重系数;A为反应釜底面积;h为物料的液面高度;Fin为流入物料的质量流量;Fout为流出物料的质量流量,

式中:β为紊流状态下的节流系数。

式中:cp为物料的比热系数;Tin为流入物料的温度;T为反应釜物料的温度;Tst为蒸汽管壁的温度系数;UA为蒸气管壁的传热系数;hmax为物料液位的最大高度;

式中:k为比例系数。
根据参考文献[4]可以得到数学模型式(1)~(3),本文假定换热箱中的蒸汽管壁的温度Tst与蒸汽流量Fst成正比,因此得到数学模型式(4)。
2.1.3 工程化描述
为了便于模型能在PCS7 中进行CFC[8]建模实现,将上述模型的对应变量进行了工程化描述,见表1。
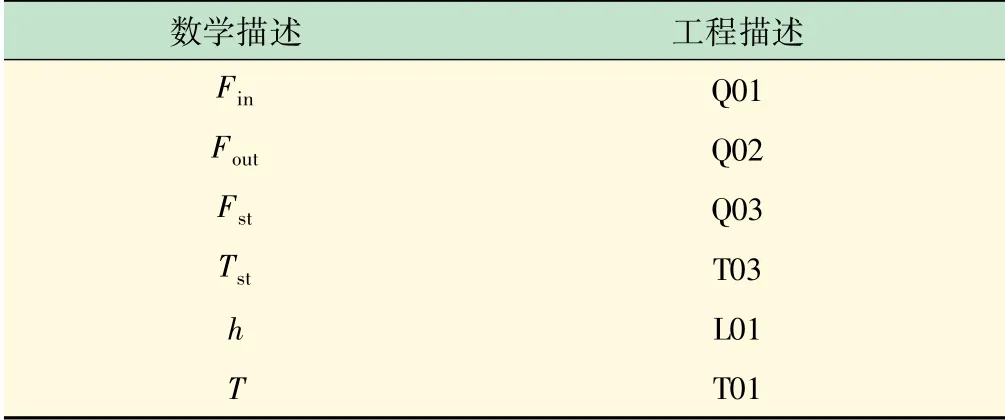
表1 变量工程化描述
2.2 CFC仿真被控对象
2.2.1 建立CFC模型
(1)开关阀仿真。考虑到工艺操作的需要,模型中的进、出水管道,以及蒸汽管道都有相应的开关阀,开关阀XV01、XV02、XV03 的实现方式是一样的。以开关阀XV01 为例,其功能为:当XV_01_CTRL =1 时,XV01_FB_CLS =0,延时一段时间后,开关量输出信号XV01_FB_OPEN =1。当XV_01_CTRL =0 时,XV01_FB_CLS =1,延时一段时间后,开关量输出信号XV01_FB_OPEN =0。其CFC仿真实现如图2 所示。
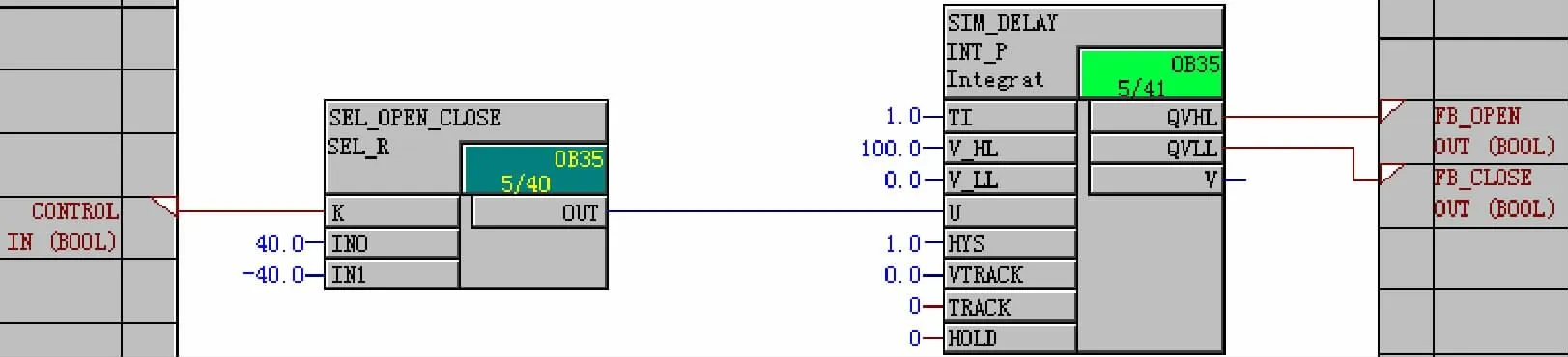
图2 开关阀仿真实现
(2)调节阀仿真。考虑前后压差、前置开关阀状态和放大系数的影响,3 个调节阀V01、V02 和V03 根据阀门控制信号实现对调节阀流量的调节,阀门信号的输入范围为0 ~100%。流量Q与压力P的关系为:考虑到惯性特征,加入一阶惯性环节,其CFC仿真实现如图3 所示。
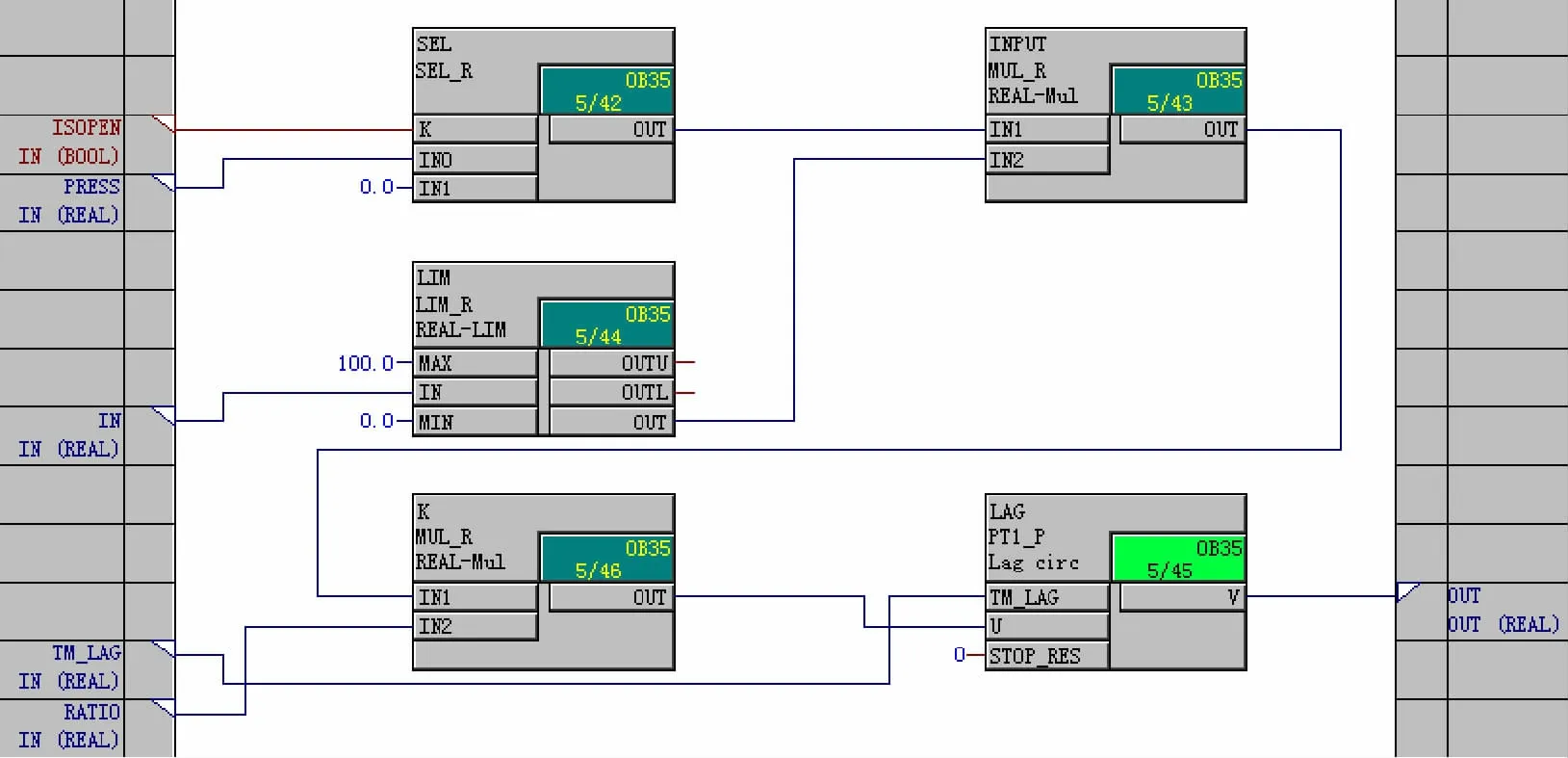
图3 调节阀仿真实现
(3)加热箱过程仿真。表1 中有5 个输出信号:L01、T01、Q01、Q02 和Q03 是对象模块根据输入信号得到的5 个输出信号,模块的输出、输入信号的关系由加热箱本身的数学模型决定。其中,系统的被控变量为L01、T01 和Q02,其中部分参数已被设为相应常数。建模步骤如下:
步骤1流量过程模型。模型中TM_LAG(时间常数)、PRESS(压力)和RATIO(放大系数)为设定的常数,IN 为调节阀输入信号,Q01 和Q03 通过数学模型(2)与V01 和V03 建立联系。Q02 的实现稍有不同,将PRESS参数连接到L01,即考虑了出水流量与液位高度的如式(2)所示的关系。其CFC 实现如图4所示。
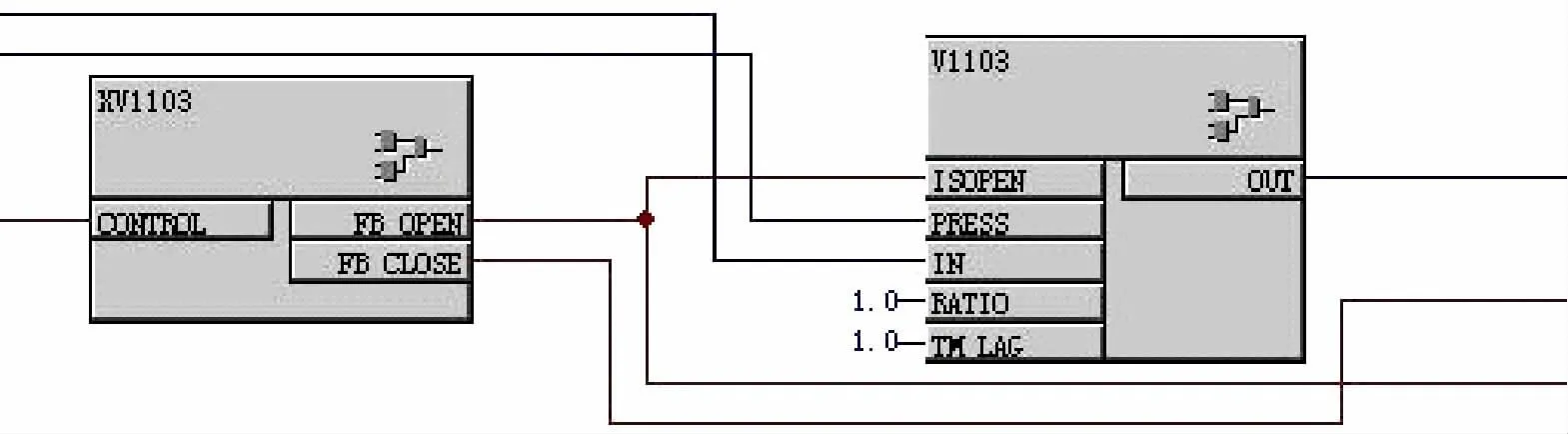
图4 流量模型实现
步骤2液位过程模型。模型中容积系数LAREA(加热箱面积)为设定的常数。液位高度由进水流量Q01 和出水流量Q02 通过相应数学模型(1)确定。其CFC实现如图5 所示。
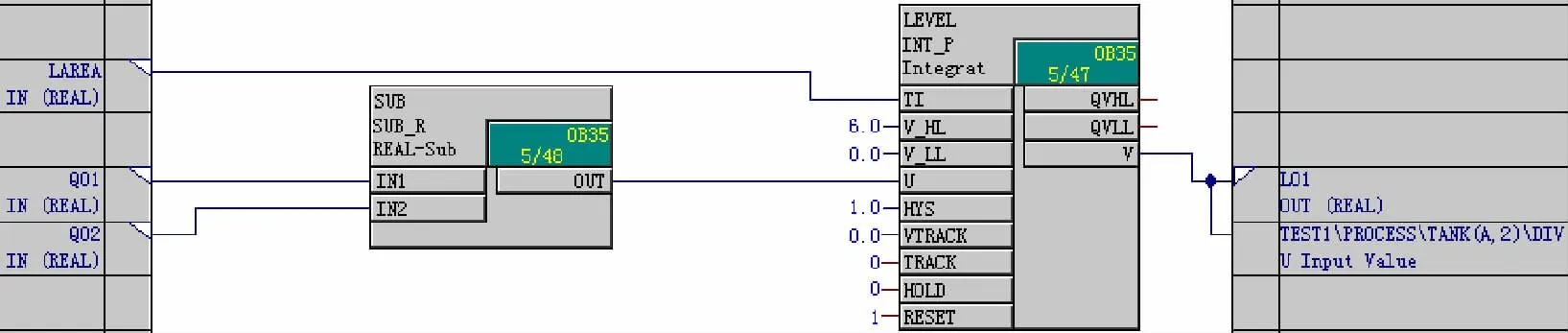
图5 液位模型实现
步骤3温度过程模型。模型中TEMP_ENV、TK_ENV、Q01_KT、Q1101_T0 和TEMP_K 均为设定的常数。温度与整个系统的热量输入、输出相关,通过数学模型(3)和(4)确定,并且受液位和流量的影响。其CFC实现如图6 所示。
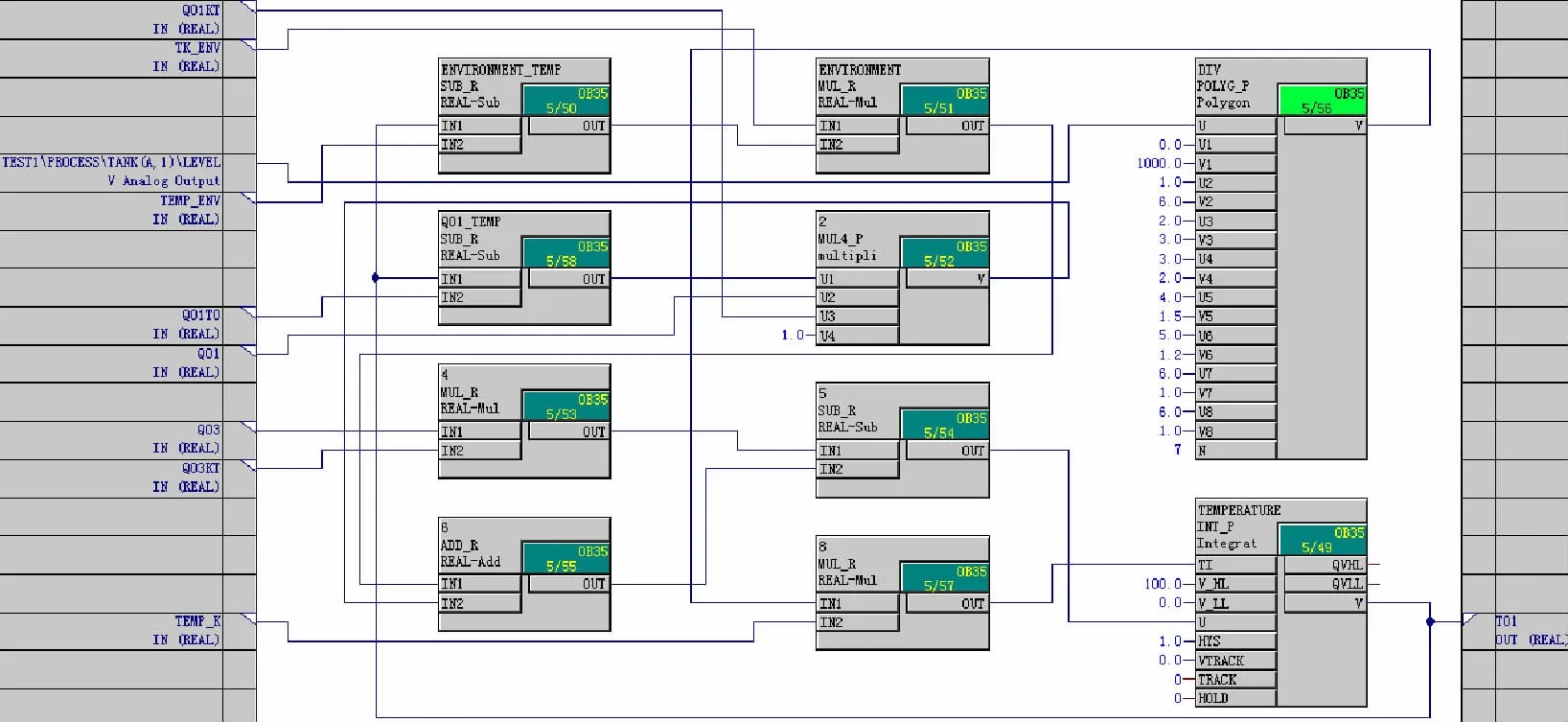
图6 温度模型实现
2.2.2 模型仿真PROCESS模块
基于CFC设计了上述加热箱对象的模型[9]。将其封装成为一个独立的功能块(FB)。如图7 所示。
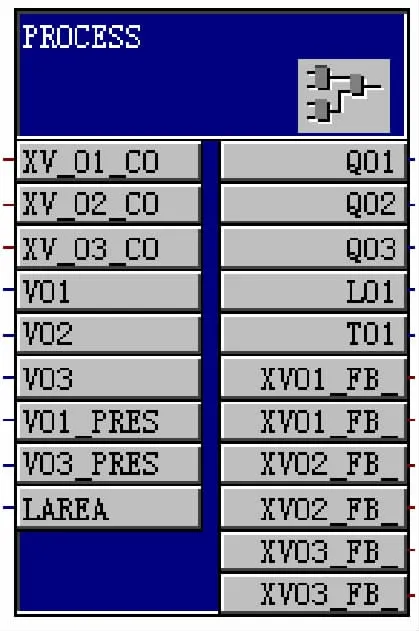
图7 加热箱功能块
3 控制系统设计
3.1 控制回路的设计
将各被控变量的控制回路设计成单回路控制系统,实现教学目标,分别为温度、液位、流量和温度串级等控制回路。为了进行复杂回路的实验,将Q03 引起的波动引入温度控制回路的串级控制系统[10]。其方框图如图8 所示。
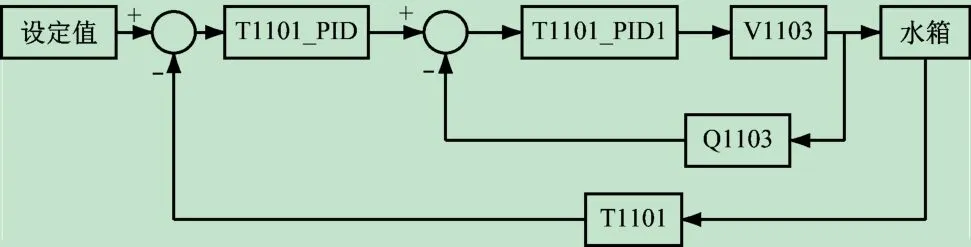
图8 温度串级回路方框图
该控制回路采用串级控制,由内环控制器克服由Q03 波动对温度造成的影响,由外环回路对温度进行调节[11]。
3.2 控制方案的CFC实现
在实验之前,教师引导学生充分了解了仿真模型的原理。让学生自主建模,设计相应的控制回路。如果时间有限,教师可以事先将部分模型建立好,让学生使用。
3.2.1 单回路多变量控制系统实验
CFC控制回路的建立。在已经建立的被控对象模型基础上,构建被控对象的功能模块。使用CTRL_PID模块进行参数设置,如报警值、变量单位等。通过块与块,以及变量与块的互联来实现控制回路的搭建[12]。得到如图9 所示的CFC 控制连接图(图中加入了各个被控变量的控制效果评分模块,控制效果评分模块是采用PCS7 的SCL语言,根据超调量和偏差绝对值积分撰写的自动评分模块,提供给学生直接使用,因篇幅原因,此模块的设计介绍在此省略)。
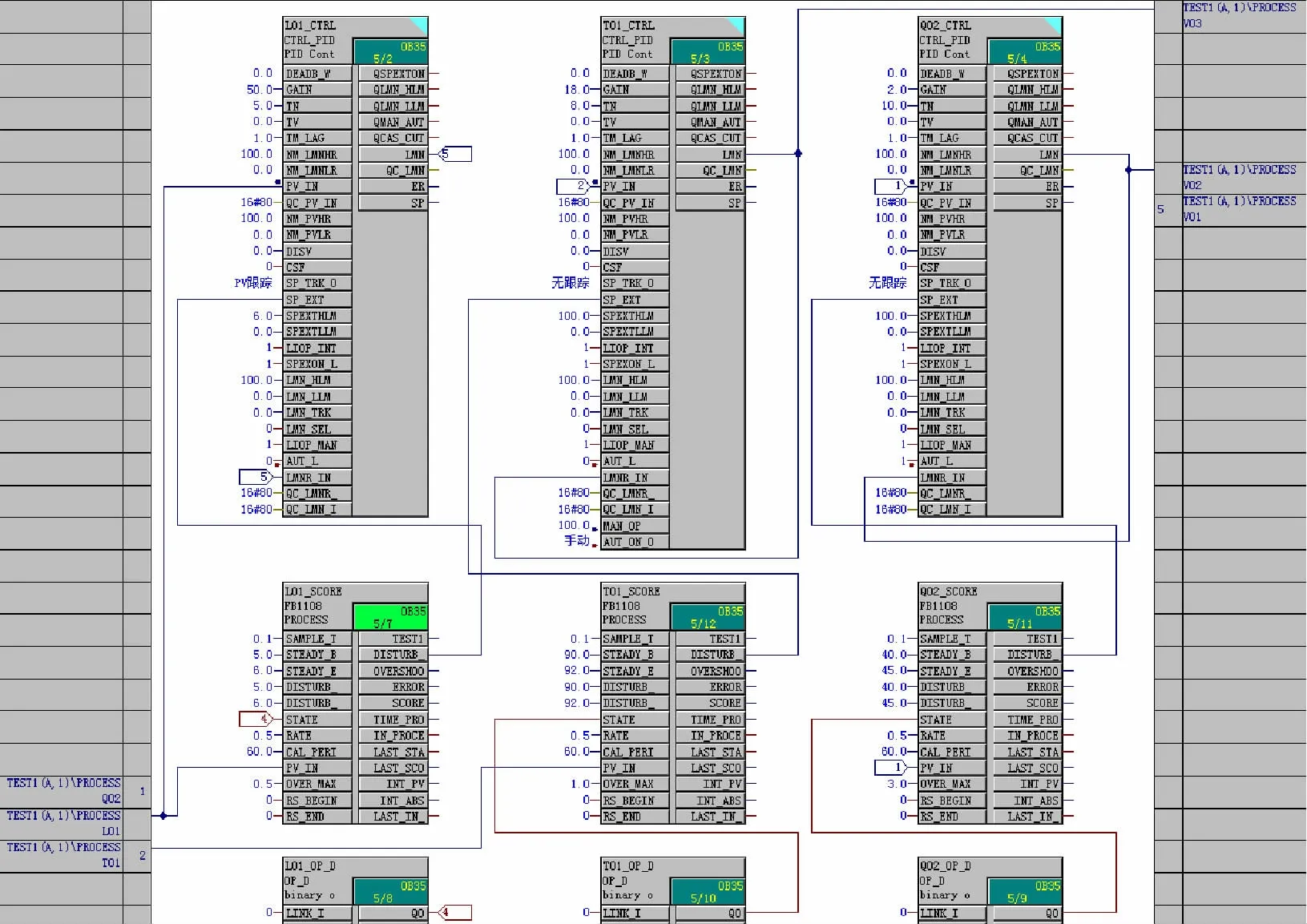
图9 CFC控制连接图
3.2.2 温度串级控制系统实验
(1)CFC控制回路的建立。考虑到温度易受输入蒸汽流量波动的影响。将串级控制引入到温度控制回路,克服蒸汽流量波动对系统温度造成的影响[13]。副回路模型与单回路控制系统相同,是串级系统的内环,在此封装成子系统。其CFC连接图如图10 所示。
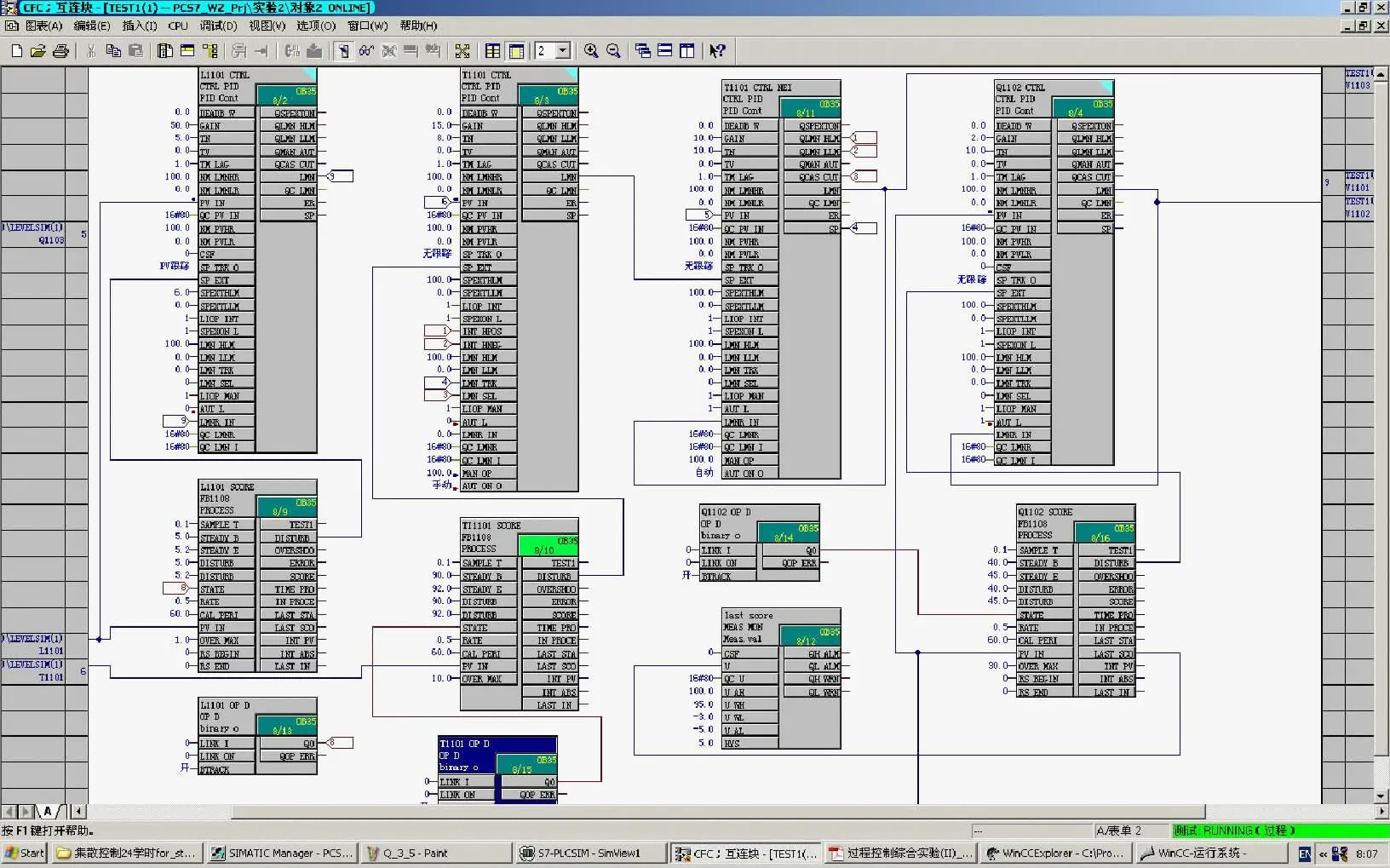
图10 温度串级控制回路CFC连接图
(2)串级控制系统参数整定。在主、副控制器参数整定过程中,由于系统中主、副回路是互相影响的,常常采用逐次逼近法。使主回路开环,按单回路方法整定副控制器;让主回路闭环,在已整定过的副控制器下,整定主控制器参数;在主回路闭环的条件下,重新整定副控制器参数,至此完成了一个逼近循环。如果已经满足控制要求,则上述所求即为控制器参数,否则,重复上述过程,直到获得满意的调节参数[14]。由于第1 步(整定副控制器参数)的工作已经在单回路液位控制系统实验中完成,所以只需再进行后续整定主控制器参数和反复调整。这里,只需要关注温度的曲线即可。
(3)控制系统的SFC 顺序控制。通过控制回路的设计以及控制器参数的整定,得到了良好的实验效果。还需编写SFC 以保证控制器自动运行控制[15]。开车SFC图和停车SFC图如图11 所示。
3.3 控制效果评价
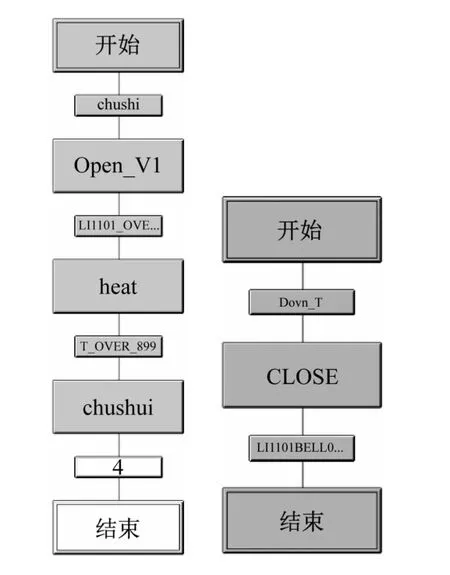
图11 开车与停车SFC图
在实验效果检验这一部分,学生在CFC中加入自动评分模块的使用,可根据控制效果来自动进行评分,在OS界面上根据不同控制参数与控制策略的控制效果,自动得出不同的评价分数。(评分模块的使用是作为扩展实验的内容,若学时有限,也可以不使用。)
当采用单回路控制流量,并且PID 参数Kp=2,Ti=10,Td=0 时可以得到如图12(a)箭头所示分数(77.15)。PID参数Tp=3,Ti=5,Td=0 时可以得到如图12(b)箭头所示分数(80.93)。可以看出,当参数调节得更加合适时,分数可以得到提高。
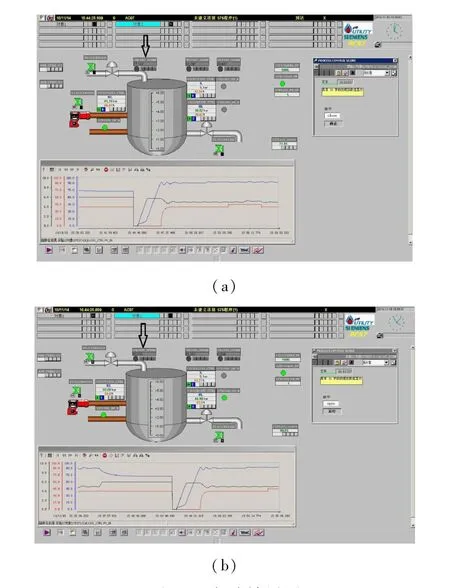
图12 实验效果图
同时,在OS 界面我们可以获得许多信息并能进行很多简单操作[16]。
4 教学效果
由实验实例看出,以多变量复杂控制系统温度串级控制系统实验为主线,将实物对象建模和多变量单回路控制实验作为其先行基础实验,自下而上的课程知识融会贯通,实验教学的系统性更好。实验手段上加入PCS7 仿真后,不仅让实验加强了与工业现场的联系,而且提高了学生对过程控制系统与集散控制系统相关性的认识,同时也提高了实验效率与效果。比较使用软件仿真前后,在相同的实验下,原来学生们只会单回路的变量控制,而现在学会了多变量的控制,并且学会了集散控制系统的控制流程。在相同的时间下,学生学会的知识更加丰富。通过软件仿真,学生将动手操作与理论学习相结合,深入理解控制参数对系统特性的影响,提高了学生分析、解决实际问题的综合能力。
5 结 语
本文以实际的教学案例分析基于PCS7 的过程控制实验设计。本文设计的过程控制综合性实验,将仿真与实际控制相结合,将过程控制系统与集散控制系统联系,不仅能提高实验的效率,还可以引导学生对控制系统进行更深入的研究,是提高控制工程实践环节教学效果的有效途径。实验内容的有机综合,提高了实验内容的质量,增进了学生对知识的消化与认识。
猜你喜欢
石油工业技术监督(2022年7期)2022-08-18
湖南税务高等专科学校学报(2021年4期)2021-08-30
中学生数理化·中考版(2020年10期)2020-11-27
环球时报(2020-08-11)2020-08-11
机电工程技术(2018年10期)2018-12-06
意林(2018年3期)2018-03-02
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
汽车维护与修理(2015年2期)2015-02-28
自动化博览(2014年12期)2014-02-28
科技传播(2012年10期)2012-06-06
