
一型国产无人机直升机铯光泵航磁系统补偿方法研究和试验
2020-06-16 01:02许庆丰黄申硕
海军航空大学学报 2020年1期
许庆丰,柳 丽,黄申硕,吴 芳
(1.上海通用卫星导航有限公司,上海200040;2.上海航天电子技术研究所,上海201109;3.北京桔灯地球物理勘探股份有限公司,北京102200;4.海军航空大学,山东烟台264001)
航空磁法是航空物探的重要手段之一,通常采用有人驾驶飞机,因此,存在飞行成本高,有人员伤亡等风险。随着技术的成熟,无人机以其成本低、操作维护简单、可长时间低高度飞行等优点,已逐渐替代有人驾驶飞机执行航磁任务[1-4]。无人机普遍载荷较小,这对机载设备的小型化、低功耗提出了较高要求。无人机内部设备布置紧凑,对航磁系统而言,容易对磁探设备造成干扰,因此,需要有针对性地研究磁补偿方法。
长期以来,国内的铯光泵航磁设备均为进口,铯光泵探头主要有加拿大Scintrex 公司的CS-3、CS-L、CS-VL系列[5],美国Geometrics公司的G-822、G-823系列[6],其中CS-VL 重量约680 g,为同类产品中质量最轻的一型。小型磁补偿器主要有加拿大RMS 公司的AARC51型磁补偿器,重量约1.8 kg[7]。无人机航磁系统集成方面,劳雷工业公司在意大利Flying-Cam公司的无人直升机上集成了CS-VL 铯光泵探头及AARC51 磁补偿器[8];中国地质科学院与中国地质调查局在固定翼CH-3无人机上搭载AARC51补偿器及CS-VL铯光泵探头,在多宝山[9]、新疆克拉玛依和喀什等地开展了试验[10]。中国船舶重工集团有限公司第七一五研究所研发了多旋翼无人机航磁测量系统,搭载氦光泵磁力仪,进行了手动补偿[11]。山西省煤炭地质物探测绘院采用WH-110A 型无人直升机,同样搭载AARC51 补偿器、CS-VL 铯光泵探头组成无人直升机航磁测系统[12]。
为改变国内航磁设备长期依赖进口的局面,2017年国家重点研发计划设立重点专项“机载高精度磁力仪”,用于陆地及海洋资源勘探。该项目由上海通用卫星导航有限公司牵头组织,共有清华大学、上海航天电子技术研究所、国家海洋局南海调查技术中心等7家单位参与其中。本文对相关研究成果进行介绍。
1 无人机航磁系统构成
1.1 铯光泵探头
本次研发的航磁系统采用上海通用卫星导航有限公司研制的GSN-882型铯光泵探头,为自激式分光束铯蒸气磁力仪,工作模式为连续正弦波输出,自动南北半球切换。电气接口与国外同类型铯光泵探头如CS-L,CS-VL等兼容,重量约900 g。
铯光泵探头的主要技术指标包括测量范围(Measurement Range)、噪声水平(Noise Envelope)、航向误差(Heading Error)、梯度容限(Gradient Tolerance)等。GSN-882 型铯光泵探头在中国船舶重工集团有限公司第七一〇研究所下属的国防科技工业弱磁一级计量站进行了检测,实测指标如表1所示,与国外同类产品相当。
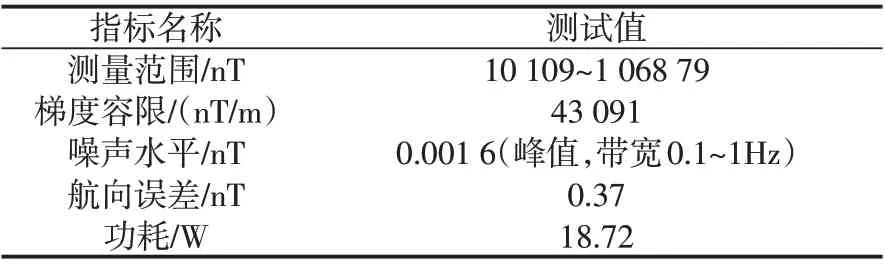
表1 GSN-882型铯光泵探头主要指标实测值Tab.1 Measured value of GSN-882 cesium vapor magnetometer sensor
1.2 航磁系统组成
无人机航磁系统包括以下组件:GSN-882铯光泵探头、航磁补偿器、磁补偿探头(三分量磁通门)、GPS差分接收机(中海达SKY2)、航姿模块(HEC 395)、激光高度计(GLS-B 1000)以及数传电台。连接关系如图1 所示。航磁补偿器最多可接4 个铯光泵探头,构成梯度探测模式。航磁补偿器重量约1.7 kg,采样率100 Hz、200 Hz、800 Hz、2 000 Hz 可选。GPS差分定位的平面误差≤10 cm,高程误差≤10 cm,采用双天向定向时,定向精度≤0.5°,可满足大比例尺航磁测量定位的精度要求。
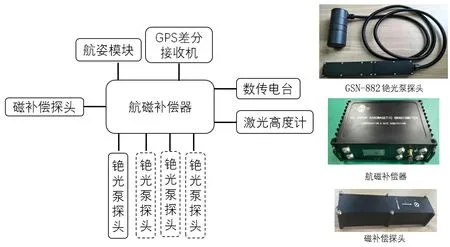
图1 铯光泵航磁系统构成及主要部件Fig.1 Composition and main components of cesium vapor aeromagnetic system
2 无人机平台的选型与磁净化
适合海洋作业的无人机平台须具备以下特点:飞行平稳、续航时间在2 h 以上,飞机本身磁性小,具备在船上起降能力。经过调研,选择“飞钥”100 kg 级的油动直升机平台。该直升机旋翼直径3.2 m ,载重35 kg,续航能力为3 h,测控距离大于30 kg,飞行速度5~12 m/s。作为搭载航磁设备的飞机平台,飞机本身的磁性越小越好。根据磁性的强弱,平台的主要磁性来源有:电机内部的永磁体(如舵机、水泵、油泵的电机)、永磁铁零件(如某些阀门)、铁磁性结构材料、大电流的电缆等。磁净化措施包括:在强度允许的情况下,飞机的结构材料尽量采用铝合金或钛合金等无磁材料。例如,起落架、靠近磁敏感探头的螺丝等;对于永磁电机,可采用高导磁材料制作电机屏蔽罩;为光泵探头设计伸出支架。采取磁净化措施后,在2.5 m 长碳纤维杆伸出杆顶端位置,飞机的剩余磁场由改进前的最大50 nT 降低至15 nT 左右。航磁系统各部件在机上的安装位置如图2所示。
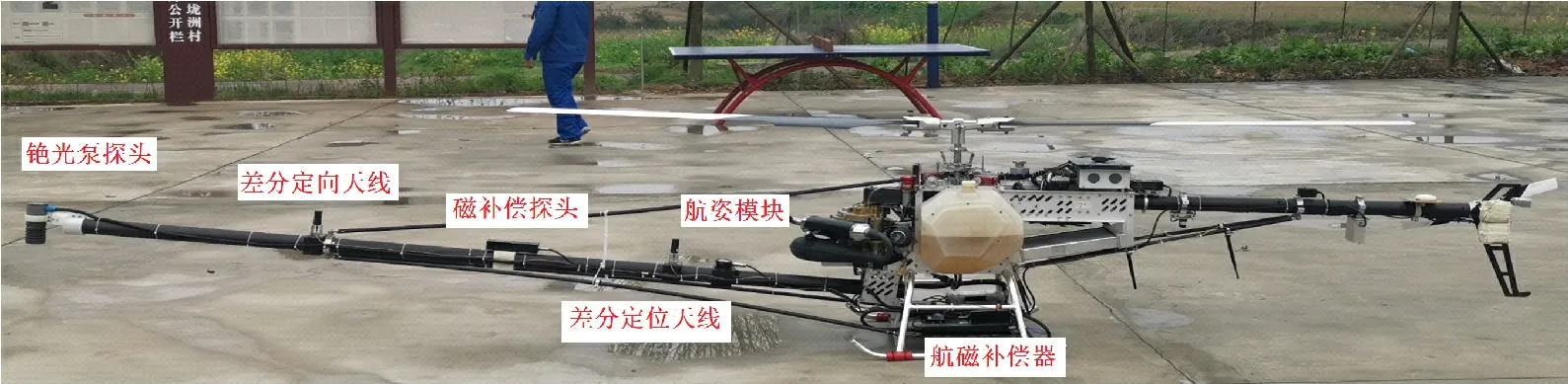
图2 铯光泵航磁系统在“飞钥”直升机上的安装Fig.2 Installation of cesium vapor aeromagnetic system on UAV Helicopter
3 地面静态噪声测试
依据文献[13],航磁系统的噪声测试分为地面静态噪声水平测试和航线的动态噪声水平测试。航磁系统在机上安装后,在地面使用机外电源供电,观察记录时间不小于2 h,采样间隔为0.5 s,记录数据按照式(1)计算地面静态噪声水平,不大于0.01 nT 为一级:
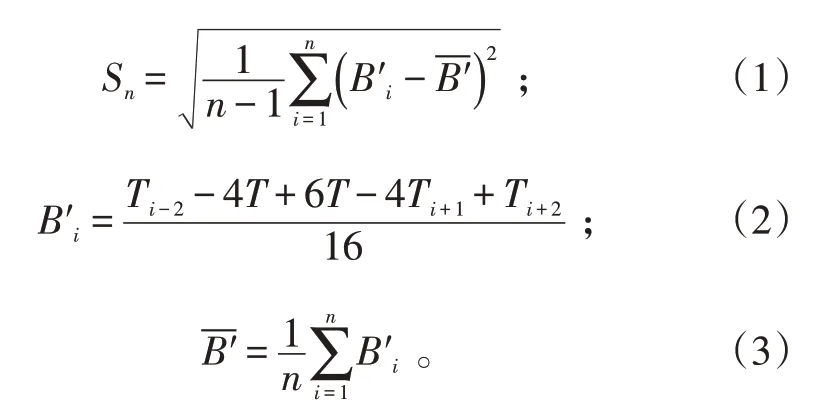
n 为采样点数,序号i=1,2,…,n。本例中,航磁系统采样率为100 Hz,故对原始数据间隔50 个点抽点,等效为0.5 s 的时间间隔。记录2 h 数据,计算静态噪声为0.002 7 nT,记录3 h 为0.002 2 nT,达到《航空磁测技术规范》要求的一级水平。
4 无人机平台的磁补偿
飞机平台的补偿精度决定了航磁系统是否具备作业条件。文献[13]中,5.13 节及附录A 中给出了磁补偿的建议方法和精度要求,其理论基础为(T-L)方程,通过(T-L)方程的推导过程,可进一步分析磁补偿飞行的条件。
4.1 经典的T-L方程
飞机平台的磁补偿模型是W.E.Tolles和Q.B.Lawson 建立的数学模型,简称Tolles-Lawson(T-L)方程。Leliak对该模型进行了理论上的论证[14];Bickel对该模型算法本身的误差做了分析[15-16];Leach进一步研究了通过解线性方程组求解系数的方法[17]。T-L方程揭示了飞机干扰磁场与飞机姿态的关系,是基于飞机平台是均匀磁化体、刚性连接的假设。建立飞机坐标系如图3所示。
取机头方向为Y 轴正向,机头左侧为X 轴正向,下方为Z 轴正向,分别用X0、Y0、Z0表示地磁矢量T0与X、Y 、Z 轴的夹角。飞机干扰磁场Hd主要由剩余磁场Hpd、感应磁场Hid和涡流磁场Hed组成。由T-L方程推导[18]得到飞机干扰磁场ΔT 与飞机姿态关系的16项系数矩阵表达式(4):
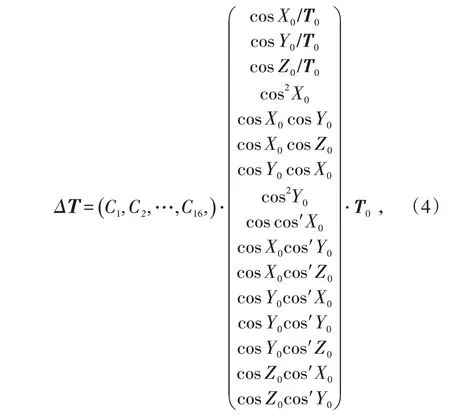
式中,C1~C16为飞机平台的磁补偿系数。
T-L 方程推导过程假设地磁场T0为常数,所以做磁补偿飞行求解16项系数时,须要选择地磁梯度尽量小的区域。
4.2 地面硬补偿模型
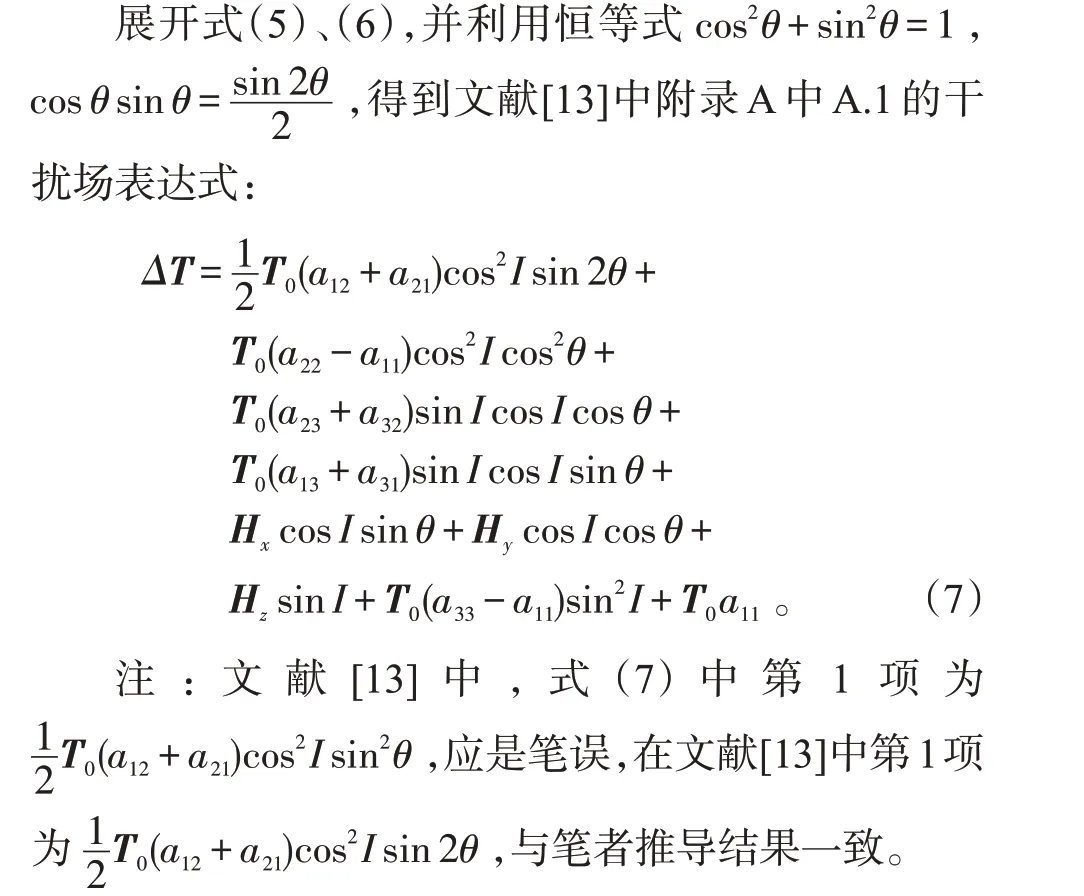
在文献[13]附录A 中也提供了在地面补偿的方法,即飞机在地面静止情况下的简化T-L方程,可以减小地磁梯度对补偿的影响。地面状态下飞机磁场仅为剩磁和感磁。设磁倾角为I(地磁矢量T0与水平面夹角)、飞机磁航向角为θ(航向与磁北夹角)。坐标系如图4所示,飞机剩余磁场Hx、Hy、Hz在地磁场上的投影HPd为:

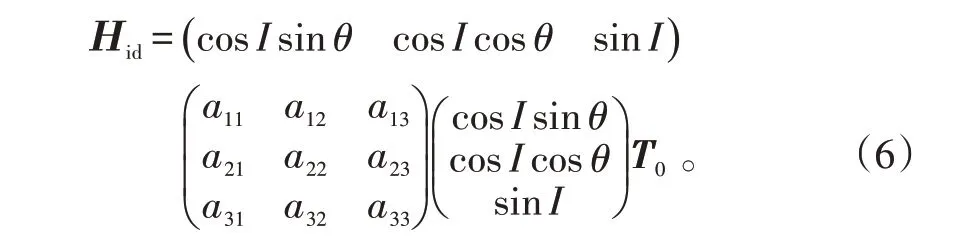
感应磁场Hid在T0上的投影为:
在地面,依次在飞机朝向0°、45°、90°、135°、180°、225°、270°、315° 8 个方向取光泵磁场值。同样,求解线性方程组,计算补偿系数并评估补偿效果。地面硬补偿模型不包含涡流场系数,且不能做倾斜和俯仰动作,并不能完整求出T-L方程中的16项系数。
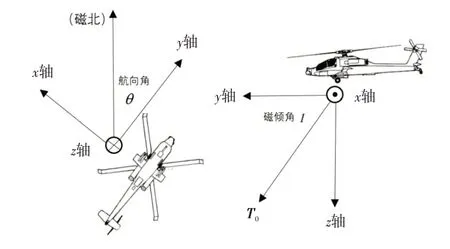
图4 飞机地面状态的坐标投影关系Fig.4 Coordinate projection relation of aircraft ground state
4.3 适用于无人直升机的悬停补偿方法研究
为求取T-L 补偿模型中的16 项系数,依文献[13]中的5.13.4.3,对于有人驾驶固定翼飞机,在一定高度地磁环境平稳的区间,沿着0°、90°、180°、270° 4个航向依次做±15°左右倾斜,±5°左右俯仰飞行共16个动作,光泵测量值出现的偏差绝对值的积累总和称为品质因数(FOM),补偿后的FOM 越小表示补偿效果越好。根据文献[13]中5.13.4.3 要求,航磁总精度≤1 nT 时,FOM应不大于10 nT。
对于补偿质量的评价,文献[13]中5.13.5“磁软补偿精度及衡量方法”中要求补偿后标准差优于±0.08 nT,这就对补偿区域地磁环境磁场均匀度提出较高要求。通常根据IGRF模型在作业地区附近寻找磁梯度小的区域,在3 km 以上高度进行磁补偿飞行,以减小近地面地磁梯度对补偿系数计算的影响。国内相关单位进行的直升机航磁补偿也都是参照经典四边形补偿航线进行[12,19-20]。但无人直升机在实际操作中很难按上述要求进行磁补偿飞行:无人直升机在自主飞行模式下,飞行控制器采用陀螺仪控制姿态,平飞中难以实现大角度的倾斜、俯仰动作,需要切换为手动方式进行,这就要求飞机进行补偿动作时飞行高度不能太高,不可飞出操作员的目视范围。而低高度地磁环境复杂,又难以满足磁场均匀的条件。
分析T-L方程(4)可知,16项系数中前8项系数仅与飞机航向和姿态有关,与飞机速度无关;后8项系数与飞机姿态变化率有关,同样与速度无关。参照文献[13]中附录A 中的地面补偿方式的思路,对于直升机可考虑采用定点悬停的磁补偿方法:飞机在30~50m高度悬停,分别在4 个朝向手动控制做±15°左右倾斜,±5°左右俯仰动作,每个动作重复3~5次,姿态变化率尽量与平飞时接近。做磁补偿动作期间保持飞机位置尽量不动,只是机头朝向发生变化,这样可以最大程度减小地磁梯度对补偿的影响。图5、6是按这一方法得到的飞机姿态角以及光泵地磁总场的补偿前后曲线。表2 统计了悬停补偿动作所得到的16 个动作的FOM,多次动作取幅度最大的一次计算。
由统计数据,根据文献[13]中5.13.4.3 中FOM 的计算方法,求得补偿前FOM 为100.77 nT ,补偿后为6.09 nT。
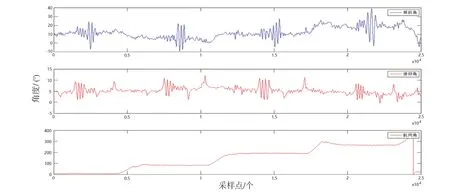
图5 原地悬停补偿动作的倾斜角、俯仰角和航向角变化Fig.5 Variation of roll,pitch and heading angle of hovering compensation action
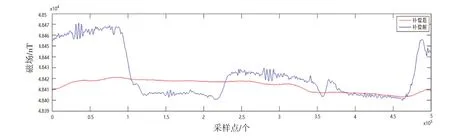
图6 采用16项系数补偿后的光泵磁场值Fig.6 Magnetic total field value compensated by 16 coefficients

表2 原地悬停补偿动作FOMTab.2 FOM of hovering compensation action nT
4.4 航磁总精度评价
依据文献[13]中8.3.8 要求,航磁总精度用在同一高度的交叉航线磁场差值的均方差来衡量,计算公式如下:

式(11)中:σi为第i 个航线交叉点的磁场差值;n 为参与计算的交叉点个数。
图7 为实际飞行航线GPS 轨迹,飞行区域约200 m×100 m,飞行高度100 m,取其中16 条南北向航线和6 条东西向航线做评价,平行航线间隔约10 m,飞行过程中采用PMG-2型质子磁力仪作为地磁日变站记录日变。
消除地磁日变后,各交叉点补偿前后差值统计如
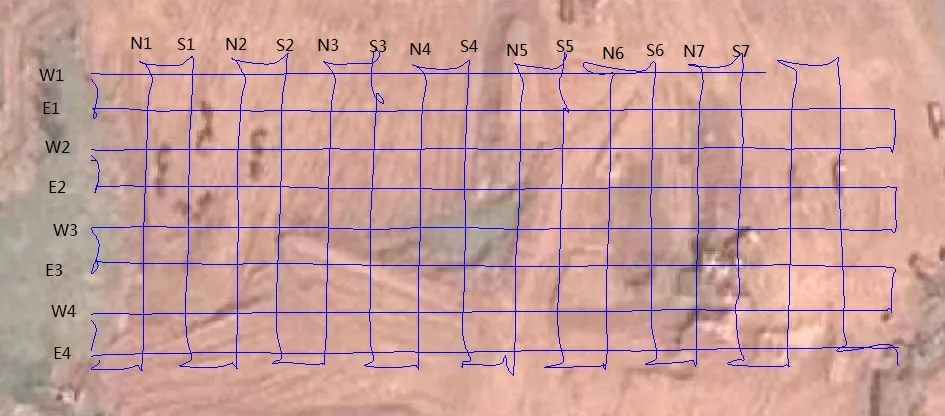
图7 航磁总精度评价航线Fig.7 Aeromagnetic total accuracy evaluation route
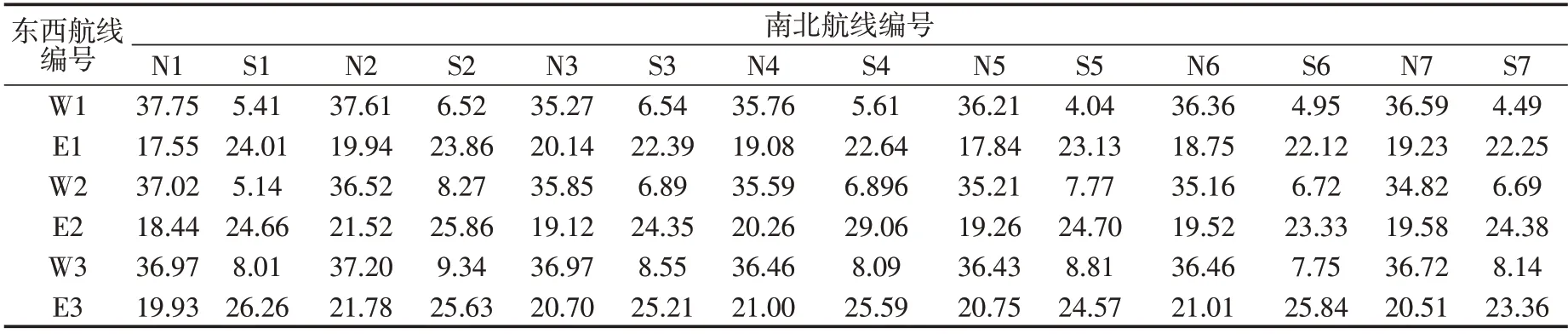
表3 补偿前的交叉点磁场差值Tab.3 Magnetic field difference at the intersection before compensation nT
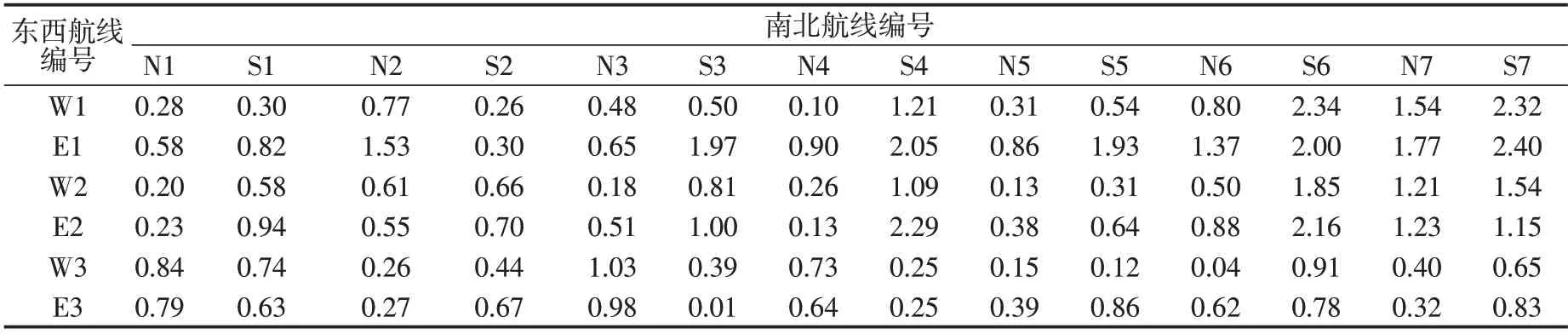
表4 补偿后的交叉点磁场差值Tab.4 Magnetic field difference at the intersection after compensation nT
4.5 航磁动态噪声评价
对飞行测线,按文献[13]中8.3.3.1 式(12)计算单条测线的动态噪声值(如采样间隔小于0.5 s,采取抽点方法),用以评价每条测线的数据质量。动态噪声小于0.08 nT 为一类设备。
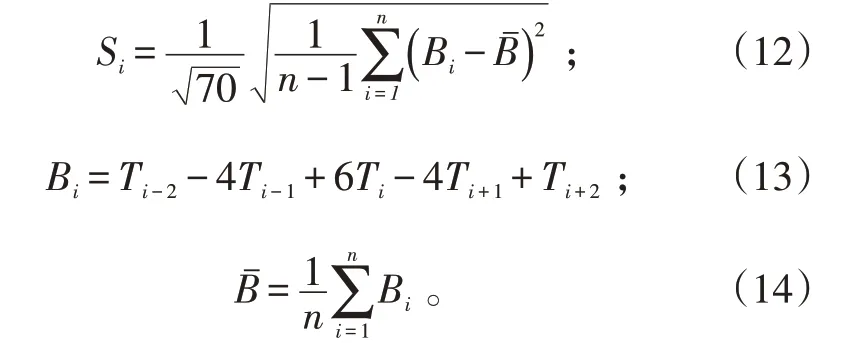
与计算地面静态噪声相同,本例中磁力仪数据同样间隔50 个点抽点,表5 列出了图7 航线中各航线的动态噪声计算值,最大0.037 nT,按文献[13]中8.3.3.1中的评价方法,达到了一类设备要求。

表5 各航线动态噪声统计表Tab.5 Dynamic state noise test statistics table nT
5 结论
本文在“飞钥”油动无人直升机上进行了国产铯光泵航磁系统的安装及实验。系统由铯光泵探头、航磁补偿器、三分量磁通门补偿探头等组成。通过分析经典T-L 补偿模型及地面硬补偿模型,研究了适用于无人直升机平台的定点悬停补偿方法;依据文献[13]进行了地面静态噪声水平、磁补偿精度、航线动态噪声水平、航磁总精度的初步评价。结果表明,无人直升机采用低高度定点悬停的补偿方法,补偿效果同样能够达到文献[13]中要求的一类设备水平,航磁总精度为1 nT 以下,FOM不大于10 nT。这为无人直升机航磁系统提供了一种求取磁补偿系数的新方法。该系统关键软、硬件均为国内研制,对类似的国产设备在地球物理勘探应用中发挥更大作用提供借鉴。
猜你喜欢
当代陕西(2022年6期)2022-04-19
金桥(2021年5期)2021-07-28
舰船科学技术(2021年12期)2021-03-29
华人时刊(2020年13期)2020-09-25
重庆与世界(2020年1期)2020-02-18
劳动保护(2019年3期)2019-05-16
人民交通(2018年6期)2018-07-31
中学生数理化·高二版(2016年12期)2017-02-28
饮食科学(2016年7期)2016-07-27
Coco薇(2016年1期)2016-01-11
