
基于多维数据关联的舰载机联合目标判别技术
2020-06-16 01:02罗双才
海军航空大学学报 2020年1期
甘 翼,罗双才,陈 亮
(西南电子技术研究所,成都610036)
如何实现完善情报保障,有效支持海军军事及非军事行动(如撤侨和救灾等),是各国海军在远海行动中都必须解决的问题[1-4]。目前,远海情报保障问题解决最好的当属美国海军,但其在远海行动中,虽然舰载机有舰队自身情报侦察监视力量(如:编队舰艇、预警机和侦察机等)、卫星平台、其他航空平台乃至临近空间平台在内的众多情报来源,但均受管理体制及技术条件限制。由于各侦察平台分属不同业务部门,各平台分发战术信息的数据格式和通信链路虽在统一过程中,如DCGS-N,但是也存在一定的差异,使得舰载机可能在接收各种侦察平台提供的多种不同格式、不同层次、可能冲突后不能有效直观地提供目标判决依据的战术信息[2,5-9]。因此,在实际作战环境中,上述信息由于不确定、不直观和需要专业人员判断等因素,不足以供舰载机直接使用以引导目标发现和判证。舰载机往往还是依靠自身机动能力扩大巡逻范围,通过机载光学或电子信号(含主被动各类)传感器搜索完成目标侦察、判证和任务意图判断。这就使得舰载机面临更大的威胁:基于舰载机平台的被动电子侦察精度不高、时效性较差且受对方辐射源开机影响和限制;主动雷达开机时间增加容易被敌方侦察设备捕获关键参数、光学侦察需要飞机突前到目视距离,增加了舰载机及航母战斗群面临威胁的可能性。
远海行动时舰载机面临的情报保障困难,反映了当前全球各国海军各级情报交互手段与军事/非军事行动情报支援需求之间存在一定矛盾的现状。如何在舰载机上完成多源情报融合与关联,实现各类情报按条件分级分发以及供战术使用的有效转换,是海军远海行动的现实需求。
本文重点研究联合目标判别技术及所属问题。
1 联合目标判别技术
海军舰载机的战术分发数据来源主要包括:①侦察及遥感卫星;②有人/无人空中侦察平台(非舰队自身力量);③临近空间侦察平台;④舰队自身侦察力量;⑤通过各种通信链路(含通信卫星)汇总的区域内情报信息。
以上侦察平台和侦察力量位于不同空间位置、分属不同业务单位,通信协议还未完全统一,数据格式和传输链路(如卫星通信链路和机间数据链等)、具体情报内容也有所差别,有些传感器的数据还需要专业人员长时间分析和判别,个别传感器还可能存在误判等问题,这些都使得舰载机难以获得和直接利用上述信息,实现有效目标判证及准确引导机载传感器进行最终确认。综上所述,必须对多源侦察信息进行适合任务需求的处理、裁剪、融合和关联,才能为舰载战斗机等平台提供有效情报支援[10-13]。
舰载机可以通过加装卫星战术分发终端的方式接收卫星/临近空间飞行器侦察数据,与空中侦察机的数据交互则依靠数据链(如JIDS 和武协链)。对多源信息进行数据融合关联的前提是统一的数据格式,最优的方法是由用户提出使用需求,统一各信息源分发的信息格式;过渡期则采用兼容模式,舰载机接收信息后利用少量硬件资源进行二次数据转换。获得统一数据格式后,采用数据分选和基于最小二乘的定位收敛算法分别对多源信息中的单一信息(如TACAN)进行数据融合,获得单一辐射源的定位结果;然后,再通过多类信息关联、快速比对和基于多级分支预测的目标推理算法(后方高性能情报处理装备完成并传输至舰载机)确定目标类型、位置和任务意图(目标情报)。舰载机联合目标判别算法的实现流程如图1 所示。下面对关键流程和算法加以详细分析。
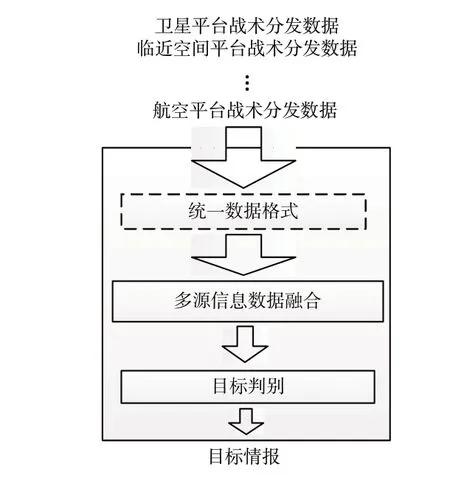
图1 舰载机联合目标判别算法流程Fig.1 Algorithm flow of shipboard aircraft joint target discrimination
2 定义信号数据格式
综合考虑各层空间平台的侦察信号类型和舰载机的作战目标,数据帧的顶层格式框架定义如表1 所示。侦察对象包含卫星通信信号、战术指挥通信信号、AIS、ACARS、IFF、TACAN、Link4A、Link11、Link16 等重要通信/非通信号以及雷达信号。无某种信号信息时,则该项缺省。
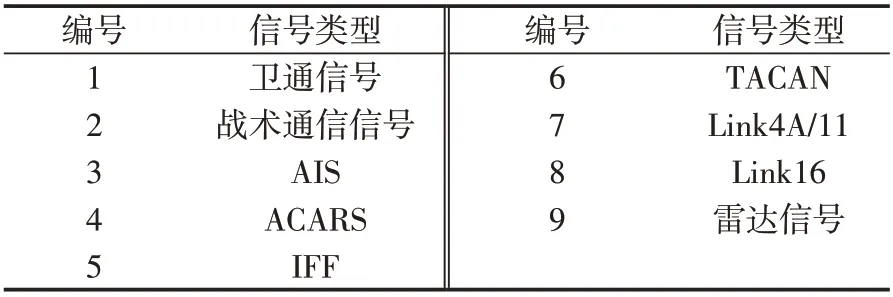
表1 数据帧顶层格式框架Tab.1 Top level format frame of data frame
下面根据各类信号的特点,选择比较具有代表性的信号,分别对其数据格式进行定义,如表2 所示。AIS信号和ACARS信号工作在固定且已知的频点上,AIS采用GMSK调制,ACARS采用AM-MSK调制,二者的信号里均包含有坐标信息。AIS 信号和ACARS信号的数据格式一致。IFF信号的重要参数包括所属系统(如美军的MarkX和MarkXII,俄军的舰载敌我识别系统等),主要特征是工作模式。TACAN信号为脉冲格式,单音,无跳频。常规数据链主要包括Link4A和Link11,Link4A工作在UHF频段,为确定的FSK调制;Link11 工作在UHF 或者HF 频段,工作在UHF 频段时一次调制为FM调制,工作在HF频段时一次调制为单边带(SSB)或者抑止载波独立边带(ISB)调制方式。Link16 数据链信号是脉冲格式,跳频工作,脉内为MSK调制。雷达信号数据帧中需包含雷达的辐射源描述字(EDW),包括脉冲调制方式(LFM、单点频、相位编码等)、重频类型(单一重频、重频参差等)以及雷达类型(远程警戒、搜索、跟踪雷达等)。
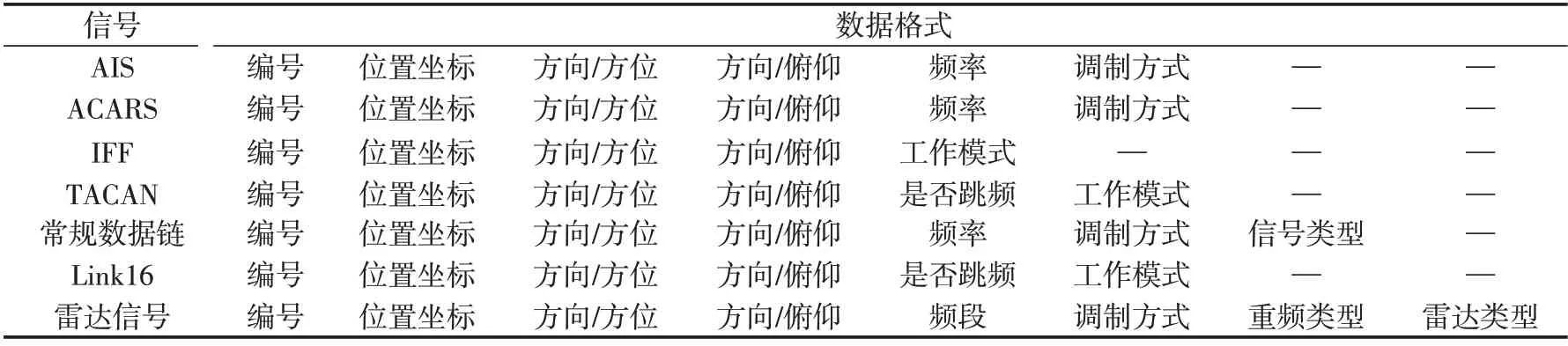
表2 各类信号数据格式Tab.2 Data formats of various signals
3 利用数据融合与关联实现多源信息综合判别提高信息准确率
第2 节定义了各类信号的主要特征。其中,各类信号生成的情报又包含多个目标信息。这不仅涉及对来自多源的单类情报的属性融合(如TACAN 信号的目标位置),也涉及多源多类情报关联的联合判别,即通过多类信号的识别结果综合判断目标属性。因此,多源信息的数据融合包含2 个步骤:第1 步,对多源的单类信息进行数据融合获取唯一结果(针对同一电子设备,或同一信号类型);第2步,将第一步获取的各类信号的结果再进行数据关联,获取最终结果。实现框图如图2所示。
3.1 多源单类信息数据融合
舰载机接收到的来自多个战术分发平台的单类信息具有以下特征:①包含多个目标信息;②不同平台对同一目标的识别结果存在偏差;③部分平台有定位结果,部分平台仅有测向结果,部分平台可能只有信号参数识别结果[12-16]。
由于信息中通常包含不止一个目标的信息,因而通过分选实现各平台间数据配对是第1步。分选的依据是第2 节中提到的位置坐标和信号特征,如IFF 信号的工作模式。常用的数据分选有距离判别法、fisher判别法等多种聚类分析算法[17-19]。

图2 多源信息数据融合实现联合目标判别流程Fig.2 Multi source information data fusion to achieve joint target discrimination process
在获得同一目标来自多源的信息后,如何从多个识别结果(含信号参数、测向和定位)中估计得到目标的真实属性就是数据位置融合和关联的关键所在。当前的侦察平台越来越多地带有定位功能,如卫星平台的双站或三站定位、侦察机的快速定位等,都能直接分发带有定位结果的战术信息;对于只有测向结果的情况,也可以通过多站定位的方式获得位置信息,定位算法有经典的Pages-Zamora算法等;对于只有信号参数的情况,则可以通过参数聚类、均值标准差计算及基于概率分布判断的奇异值剔除确定准确信号参数。下面将主要直接针对定位结果进行分析,对来自多源的同类信号(以TACAN信号为例)同一目标定位结果进行关联和估计。多源单类信息数据位置融合处理流程如图3所示。

图3 多源单类信息数据位置融合处理流程Fig.3 Location fusion processing flow of multi-source and single type information data
以多源单类信息中某个目标的位置信息为依据,采用基于最小二乘的位置收敛算法得到目标位置的精确估计,目标定位精度与各侦察平台定位精度密切相关。来自各侦察平台的目标定位信息参数质量参差不齐,奇异值的存在将会对定位精度产生较大影响,故须通过剔除奇异值和迭代运算来获得更加精确的定位结果。经过一次位置估计后,将各侦察平台测量误差估计值与误差标准差进行比较。若测量误差小于标准差则判定该平台的侦察数据有效;反之,则判定该数据为奇异值。剔除后,再对有效数据进行二次位置估计,得到更精确的位置信息。当侦察平台的测量误差全部小于标准差时,算法满足收敛条件,通过最后一次迭代找出精确位置信息。基于最小二乘的位置收敛算法流程如图4所示。

图4 位置算法流程Fig.4 Location algorithm flow
侦察对象的位置信息x 如式(1)所示。

式(1)中,‖ ‖·2为2范数。
根据加权最小二乘法原理,位置估计值为:
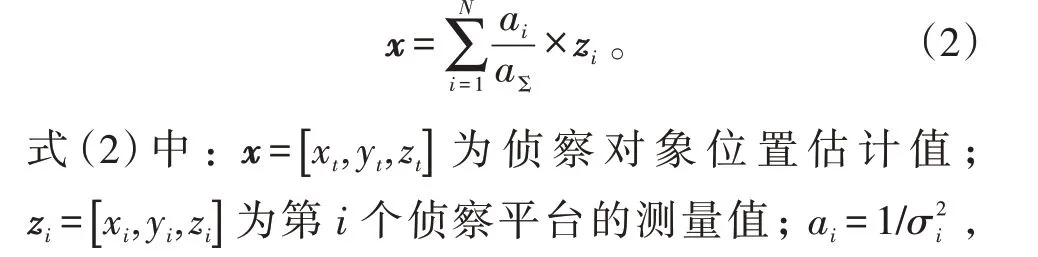

参数σi为先验信息,依据在执行任务期间依据侦察平台的测量误差估计得到,即:

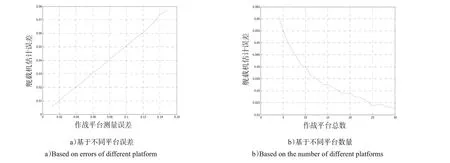
图5 估计误差曲线Fig.5 Estimation error curve
图5 a)给出了在不同测向标准差下的误差曲线(以6 个侦察平台为例)。从图中可看出,随着作战平台测量误差的增大,舰载机的估计误差也随之增大。舰载机的位置估计精度较各侦察平台提高一倍左右。图5 b)给出了测量误差为10%时,在不同数量侦察平台下的误差曲线。从图中可看出,随着侦察平台数量增多,舰载机对目标位置的估计误差逐渐减小。当侦察平台数大于7 个时,舰载机的估计误差小于5%。因此,采用基于最小二乘的位置收敛算法可以实现多源单类信息的数据融合,从而获得单类信号对某个侦察目标的唯一定位结果。
3.2 多类信息数据关联实现联合目标判别
多类信息数据关联主要解决多种信号按对象平台辐射源特性联合判断目标属性的问题。依据多层空间不同侦察传感器融合后得到的多种精确辐射源特性,采用距离判别法实现多类信息的数据关联,判断多类信息(代表多种辐射源)是否属于同一侦察对象,并形成TDW(目标对象描述字),其格式如表3 所示。然后,将TDM与目标数据库进行比对,从而识别目标类型;如果类型不匹配将TDM 回传后方情报中心,并根据TDM中的各种信息并结合其他情报(如人工情报和推理判证)得出目标类型;条件允许的情况下,引导舰载机以抵近光学侦察或主动雷达开机的方式最终确认目标类型,加入数据库并回传,充实目标数据库,其流程如图6所示。
为快速实现联合目标判别,采用2 Bytes描述目标综合属性(含关键辐射源参数),1 Byte 来表征侦察对象是否装备相应的辐射源,如Bit1=‘1’则表示该目标装备有雷达设备,反之则表示未装备。M 个TDM 数据和P 个目标库数据的比对仅需要M×P 次比较便可实现。
在此基础上,利用目标属性(辐射源、航迹、平台等),可采用人工推断的方式判断其任务意图。一旦量子计算机技术发展成熟,可利用量子的不确定性和量子纠缠,将条件库、经验库中极为庞大的分支推理算法依托机器实现,达到人工智能任务意图推断的能力。

表3 TDM数据帧格式Tab.3 TDM data frame format

图6 联合目标判别流程图Fig.6 Flow chart of joint target discrimination
4 现有硬件平台上的可实现性与效果分析
根据第3 节,多源单类信息的数据融合是联合目标判别技术的核心,其运算量直接决定了算法的可实现性。根据3.1 节中对数据融合算法的分析,该算法可在DSP 或PPC 中实现,其硬件需求见表4。在各侦察平台分发的战术信息中,辐射源个数不超过200 个的情况下,更新率设定为1 s,单次信息传输长度不超过60 kBytes。
以未来主战舰载机航空电子装备的硬件为基础,计算能力在数十GFLOP 量级,存储能力在GB 量级,通信传输最高能力也在MB 量级。因此,通过对软件进行升级和重构,即可实现基于数据融合与关联的联合目标判别。

表4 舰载机联合目标判别算法硬件需求Tab.4 Hardware requirements of shipboard aircraft joint target discrimination algorithm
5 结束语
综上所述,根据舰载机接收到多源的情报信息但难以直接使用的现状,分析了一种基于数据关联的联合目标判别算法。该算法可在不更改或少量更改舰载机电子设备硬件系统的前提下,实现目标综合属性的精确判证,为解决远海军事/非军事行动时舰载机综合战术情报保障问题提供了新思路和技术解决方案。该技术还可用于无人机和无人侦察船艇等对载荷体积重量和功耗要求较高的平台。
猜你喜欢
现代装饰(2022年5期)2022-10-13
现代装饰(2022年3期)2022-07-05
现代装饰(2022年2期)2022-05-23
小学生学习指导(低年级)(2021年12期)2021-12-31
考试与评价·高一版(2020年6期)2020-11-02
阅读与作文(英语初中版)(2019年8期)2019-08-27
中学生数理化·高一版(2017年1期)2017-04-25
中学生数理化·高一版(2017年1期)2017-04-25
读者·校园版(2016年14期)2016-07-07
小天使·一年级语数英综合(2015年10期)2015-10-14
