
基于小波与模糊相融合的苹果分级算法
2020-06-13 01:35赵利平吴德刚
食品与机械 2020年4期
赵利平 - 吴德刚 -
(商丘工学院,河南 商丘 476000)
苹果分级是苹果采摘后,销售前的一个关键环节,是实现苹果按级定价的前提。传统人工分级方法,不仅效率低,而且容易伤果[1]。随着机器视觉技术的发展,智能自动分级成了当今苹果分级的主要趋势,而大小又是分级的主要参考依据[2]。实现苹果大小自动分级的关键在于苹果图像边缘的检测,当前图像边缘检测的方法除了Sobel、Prewitt、LOG等经典算法[3],还有数学形态学、蚁群、模糊、小波等新型算法[4]。Sobel、Prewitt和LOG算法虽然计算速度较快且有一定的抗噪能力,但边缘检测精度低;数学形态学算法具有检测快的优点,但不能用于背景复杂的图像;蚁群算法仅可用于简单图像的边缘检测,没有得到推广;模糊算法的边缘检测效果较好,但抗高斯噪声的能力不强;小波算法具有抗噪的优点,但存在信息冗余的缺点[5]。小波变换可以有效抑制噪声,利用小波变换幅值代替传统模糊算法的梯度、领域灰度差值作为模糊系统的输入,可以克服传统模糊算法存在的易受噪声干扰和边缘丢失、漏检等缺陷。漫水填充法是获得图像边缘包围区域面积的一种简单的方法,不仅简单、易实现,而且对于含有内孔的区域也有着很好的填充效果。鉴于此,研究拟将小波和模糊算法相融合,用于苹果顶视图像边缘的检测,利用漫水填充法获得顶视图像的面积,再根据苹果顶视图类圆的特性将面积转换为直径,最终完成苹果的自动分级。
1 全向小波变换
1.1 全波变换理论
首先利用二维低通平滑函数求导得到二维小波函数,然后在合适尺度下对图像在0~180°的选定方向上进行小波变换,寻找极大值,然后根据阈值判定边缘[6]。
设二维低通平滑函数为θ(x,y),则二维小波函数如式(1)所示。
(1)
若尺度s=2j,则得到二维小波函数如式(2)所示。
(2)
当输入函数为f(x,y)时,在x和y两个方向的分量如式(3)所示。
(3)
二维小波变换的模和相角分别如式(4)、(5)所示。
(4)
(5)
在尺度为s,方向为β的全向小波变换如式(6)所示。

(6)

(7)
从式(7)可以看出,全向小波变换的最大值与函数平滑后的梯度模相等,因此可以借助沿全向小波变换的极大值,进行图像边缘的检测。
1.2 全波变换应用
考虑苹果图像边缘具有方向不确定的特点,选择方差为σ2的二维高斯函数作为低通平滑函数,具体如式(8)所示。
(8)
将式(8)带入式(2)得到二维小波函数如式(9)所示。
(9)
则沿水平和垂直两个方向上的小波变换如式(10)所示。
(10)
由式(9)、(10)可以推出小波变换的幅值如式(11)所示。
(11)
式中:
m、n——小波变换的窗口大小。
文中选择3×3的小波变换窗口,方向选择0°,±45°,±90°,±135°,180° 8个方向。
2 模糊算法处理
(1) 确定模糊系统的输入,考虑到传统模糊算法采用像素差作为输入存在易受噪声干扰的缺陷[7-8],文中选用3×3窗口的0°,±45°,±90°,±135°,180° 8个方向的小波变换幅值作为模糊输入。小波变换窗口和幅值如图1所示。
(2) 选择合适的隶属度函数,考虑到高斯函数没有零点且具有平滑的特性,因此选用高斯函数作为模糊系统的输入和输出隶属度函数,其函数式如式(12)所示。输入变量归一化处理,其范围为[0,1]。输入隶属度函数的模糊集对应的语言变量定义为低、中、高,输出隶属度函数的模糊集对应的语言变量定义为非边缘和边缘。高斯函数的参数设置如表1、2所示。
(12)
式中:
a——变量;
m,d——高斯函数参数。
小波变换幅值B1、B2、B3、B4、B5、B6、B7、B8为输入,像素点A5为输出,模糊规则:
IfB1andB2andB3andB4andB5andB6andB7andB8为中,thenA5为边缘像素点;

表1 模糊推理系统输入B1 ~B4Table 1 Fuzzy inference system input B1 ~B4

表2 模糊推理系统输出ZTable 2 Fuzzy inference system output Z
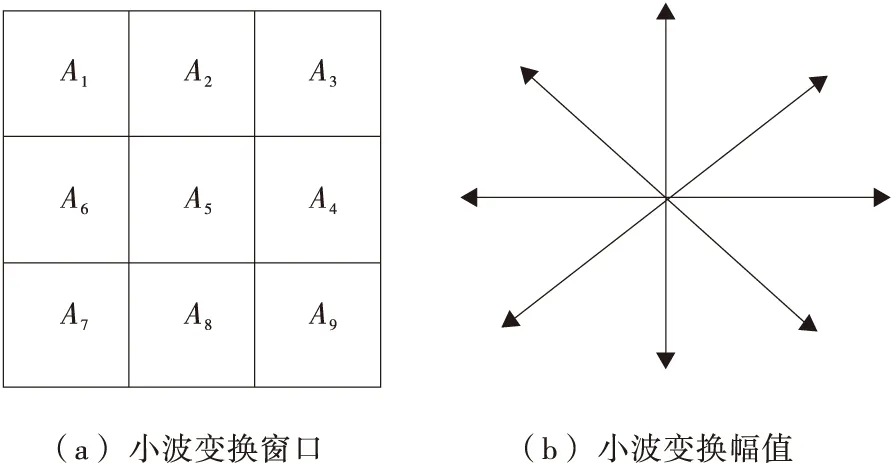
图1 小波变换窗口和幅值Figure 1 Window and amplitude of wavelet transform
IfB2andB3andB4andB5andB6andB7andB8为中andB1为低,thenA5为边缘像素点;
IfB1andB3andB4andB5andB6andB7andB8为中andB2为低,thenA5为边缘像素点;
IfB1andB2andB4andB5andB6andB7andB8为中andB3为低,thenA5为边缘像素点;
IfB1andB2andB3andB5andB6andB7andB8为中andB4为低,thenA5为边缘像素点;
IfB1andB2andB3andB4andB6andB7andB8为中andB5为低,thenA5为边缘像素点;
IfB1andB2andB3andB4andB5andB7andB8为中andB6为低,thenA5为边缘像素点;
IfB1andB2andB3andB4andB5andB6andB8为中andB7为低,thenA5为边缘像素点;
IfB1andB2andB3andB4andB5andB6andB7为中andB8为低,thenA5为边缘像素点;
IfB1orB2orB3orB4orB5orB6orB7orB8为高,thenA5为边缘像素点;其余情况A5为非边缘像素点。
(3) 通过自适应阈值得到苹果图像边缘,具体如式(13)所示。
(13)
式中:
z*——像素点z去模糊后的值;
T——自适应阈值,可根据式(14)求得。
(14)
式中:
k——去模糊后图像经过最大类间方差分类得到值;

3 漫水填充
利用漫水填充的方法获取苹果顶视图边缘图像的面积,漫水填充方法的基本原理是在苹果顶视图边缘图像内部标记一个像素点作为种子点,将其与相邻像素点进行灰度值比较,若灰度值一致,就对其进行填充,再将该填充后的像素点作为新的种子,直到所有苹果顶视图所有的像素点被填充完。
采用0°,±45°,±90°,±135°,180° 8个方向进行搜索填充,利用填充像素点的数量,表示苹果顶视图的面积,再利用苹果顶视图类圆的特性,将面积转化为直径。
4 分级试验
选择红富士苹果作为检测对象,在同一光照条件下,将CCD照相机固定于苹果上方10 cm处,垂直采集不同级别苹果的顶视图,将图像处理成256×256像素,在VC++6.0软件开发环境中,实现苹果图像的边缘检测和分级处理。
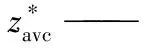
对红富士苹果进行分级试验,苹果分级标准为一级果直径80 mm以上;二级果直径70~80 mm;三级果直径65~70 mm。采用融合小波变换的模糊算法进行边缘检测,利用漫水和类圆处理获得苹果直径,一级、二级和三级苹果的处理结果如图2~4所示。
为了将苹果的实际直径与图像处理获得的直径对接好,同时获得苹果图像的分级阈值,选择了直径为80,70,65 mm的富士苹果各30个进行测试,每类苹果图像的均值即为苹果分级阈值,具体参数如表3所示。
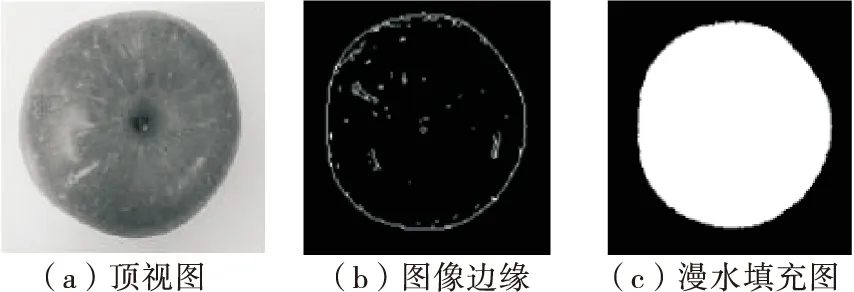
图2 一级果处理过程Figure 2 First grade fruit treatment process
图3 二级果处理过程Figure 3 Secondary fruit treatment process
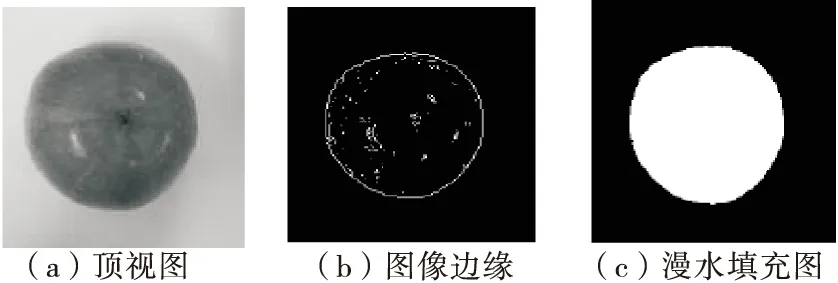
图4 三级果处理过程Figure 4 Tertiary fruit treatment process

表3 苹果阈值对照Table 3 Comparison of apple threshold
由表3可知,苹果图像直径超过190的属于一级果,166~190的属于二级果,134~166的属于三级果。
为了测试文中算法的正确性,选取了200个含有3个类别的富士苹果进行分级测试,分级测试结果如表4所示。
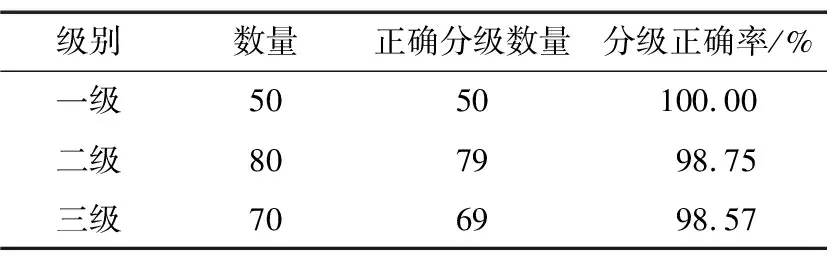
表4 分级测试结果Table 4 Grading test results
从表4可以看出,文中提出的分级算法对一级、二级和三级富士苹果的分级正确率均>98%,能够满足苹果分级的需要。
5 结束语
针对传统模糊算法存在易受噪声干扰、边缘检测不完整等问题,提出将小波变换融合到传统模糊算法中,利用小波变换代替梯度、领域差值作为模糊系统的输入,对图像边缘的正确检测起到了很好的作用,采用自适应阈值保证了图像边缘的连续性和完整性不受人为影响,采用漫水填充简易算法实现了图像边缘区域的面积获得。通过试验测试发现,该混合分级算法对于一级、二级和三级富士苹果的分级正确率均>98%,完全能够满足苹果分级的需要。但是,该算法对于不规则苹果的分级还有一定的误差,需要进一步研究和改进。
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
合肥工业大学学报(自然科学版)(2021年11期)2021-12-10
科技风(2021年19期)2021-09-07
现代电子技术(2021年1期)2021-01-17
电子制作(2019年13期)2020-01-14
微型电脑应用(2019年1期)2019-01-23
电脑知识与技术(2018年35期)2018-02-27
通信产业报(2016年44期)2017-03-13
读写算·小学低年级(2015年11期)2015-11-17
雕塑(1999年2期)1999-06-28
