欠驱动船舶运动数学模型精度及应用问题分析
2020-06-13 11:18于鹏王兴龙浙江富兴海运有限公司
珠江水运 2020年10期
于鹏 王兴龙 浙江富兴海运有限公司
1.引言
航运在促进全球贸易方面发挥着重要作用。在船舶领域,船舶数学模型是船舶技术与仿真的核心。在过去的十年中,基于一系列的物理考虑,船舶的建模理论在耐波性和操纵操作方面得到了发展。它有两个特点:泰勒级数展开(如Abkowitz模型、Norrbin模型)和模块化处理(如MMG模型、Fossen模型)。在某种程度上,模块化方法适用于特定船舶。此外,船舶数学模型的优化工作也在进行中。
然而,任何模型与实船之间都存在偏差。在研究不同问题时,应注意模型的选择。在船舶控制领域中,船舶的航向保持控制、跟踪保持控制、船舶横摇阻尼控制和避碰控制等问题在很大程度上依赖于仿真。选择合适的模型作为仿真的核心是非常重要的。本文给出了三种欠驱动船舶的数学模型,分析了它们之间的区别,以及它们适合作为仿真核心的问题。
本文章节设置如下,第一节介绍了本文研究的意义和主要内容,第二节给出了船舶的三种数学模型,分别是Nomoto模型、非线性响应模型和MMG模型。第三节以上述模型为基础进行了Z型仿真实验和旋回实验,并对其精度和适用问题进行了分析。第四节讨论了一些结论。
2.船舶模型
2.1 坐标轴以及船舶运动特点
船舶在海上航行时有六个自由度,即纵摇、首摇、横摇、纵荡、横荡和垂荡。
如图1所示,沿船长方向的前后运动称为纵荡,沿船宽方向的左右运动称为横荡,沿吃水方向的上下运动称为垂荡。横摇是绕x轴的旋转运动,首摇是绕z轴的旋转运动,纵摇是绕y轴的旋转运动。
实际上,很难建立六自由度的船船舶运动模型。因此,不同自由度的简化数学模型得到了广泛的应用。但是,不同的数学模型精度不同。本文建立了Nomoto模型、非线性响应模型、MMG模型,分析了它们的差异性。
2.2 Nomoto 模型
Nomoto模型是描述三自由度运动的线性模型。同时,二阶Nomoto模型在船舶控制领域中得到了广泛的应用,其数学原理如式(1)。
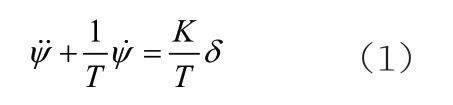
式(1)中,ψ表示船舶航向,K和T表示船舶操纵性指数,δ表示舵角。
在实际应用中,式(1)经常会以式(2)的传递函数的形势出现:

式(2)中,s 表示拉普拉斯算子。式(2)通常用于设计自动舵的控制器,并评估船舶的操纵性。但与其他非线性数学模型相比,其精度较低。
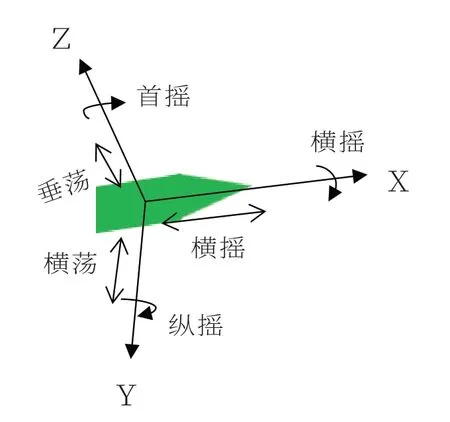
图1 船舶六自由度运动
2.3 非线性响应性数学模型
非线性响应性数学模型主要针对δ→→ψ的关系,而略去了其他自由度对航向的影响,得到的微分方程仍然保留了非线性因素。
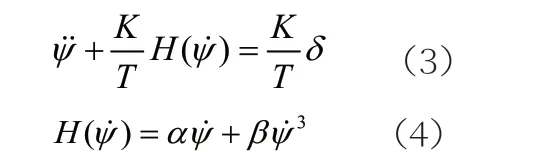
式(3)中,ψ表示船舶航向,K和T 表示船舶操纵性指数,δ表示舵角,式(4)中,α,β 表示船舶非线性系数。
非线性响应模型主要用于船舶避碰、自动舵设计。但它比Nomoto模型具有更高的精度。非线性响应模型的仿真图如图2所示。
2.4 MMG 模型
本文中的M MG 模型描述了船舶的四自由度运动,忽略了垂荡运动和纵摇运动。在研究航向保持、航迹保持控制、避碰等常见问题时,其精度是足够的。其数学描述为式(5)和式(6)。
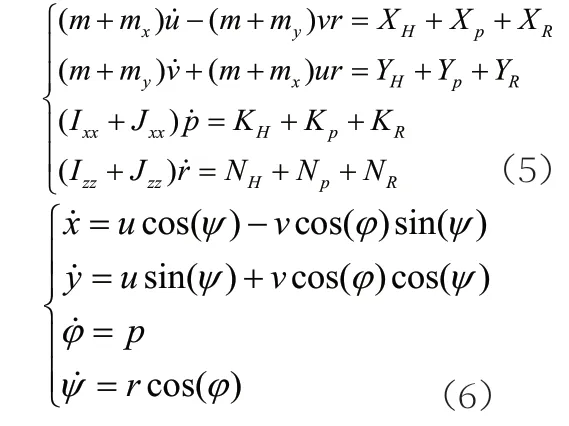
式(5)和式(6)中,u表示船舶前进速度,v表示横漂速度,r 表示首摇速度,p表示横摇加速度,m表示船舶质量,mx,my为船舶附加质量,Ixx,Izz表示船舶惯性矩。Jxx,Jzz表示船舶附加惯性矩。XH,PR,YH,PR,KH,P,R,NH,PR表示船舶受到的力和力矩。(x,y)表示船舶位置,ψ,φ分别表示船舶航向和横摇角。
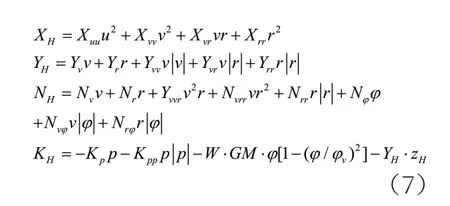
(1)船舶水动力和水动力距(XH,YH,KH,NH)
(2)推力和推力距(XP,YP,KP,NP)

式(8)和式(9)中,tp为螺旋桨推力减额系数,ρ 表示海水密度,n表示螺旋桨转速,Dp表示螺旋桨直径。

式(10)中,a0,a1,a2为常系数,Jp=(1-wp)u/nDP,wp表示伴流系数。
(3)舵力和舵力矩 (XR,YR,KR,NR)
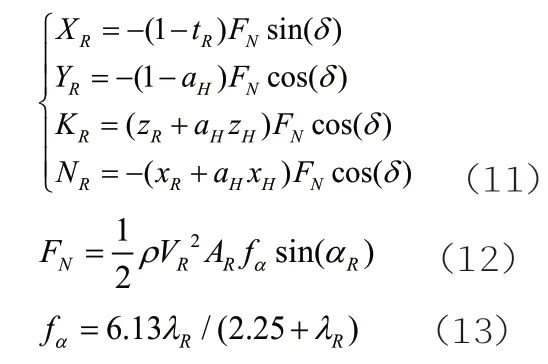
式(11),(12)和(13)中,VR表示有效流速,AR表示舵叶面积λR为展弦比,αR表示流的有效攻角。其他参数如式(14)。

式(14)中,Cb表示方形系数,L表示船长,d表示船舶吃水。
MMG模型通常应用于自动舵设计、船舶横摇阻尼控制、船舶避碰、船舶动态定位等控制器的设计。
3.仿真
仿真是验证理论设计的重要手段。在海洋研究领域,船舶数学模型的精度在很大程度上影响着算法的有效性。因此,有必要建立和使用一个具有较高精度的仿真模型。本文以不同模型为核心,进行了Z-型实验和旋回实验,并将实验结果与“育鲲”轮的实船试验数据进行了比较。图3所示的为舵机模型,包含限幅模块和饱和模块,为了保证实验的对比性,本文在实验过程中保持舵机模型不变。
仿真中,最大舵角取35度,舵机最大回转率取5度/秒。
3.1 Z-型实验
从船舶的实际操作来看,像旋回实验这样长时间保持一定的舵角是很少见的。通常情况下,方向舵是以不同的舵角从左到右连续操纵的。Z-型实验就是对这种控制方式进行仿真,通过对试验结果的分析可以得到比旋转试验更多的实际数据。此外,Z-型实验是获得船舶K,T指标的重要方法。

图2 非线性响应模型的仿真图
如图5所示,Nomoto模型在曲折试验中的性能较差。更难控制航向。这就是为什么常采用Nomoto模型设计航向控制器的原因(闭合增益形状控制器)。与M MG 和Nomoto模型相比,非线性响应模型具有较小的惯性。
3.2 旋回实验
旋回实验的目的是得到船舶一次回转的轨迹。它用于评估船舶的操纵性。目前,研究人员利用船舶对某一舵角的响应来解决避碰问题。模型预测的准确性对避碰算法的正确验证有很大影响。在本节中,进行了两次旋回实验,其中舵角分别取-20度和35度
图7显示了模拟和船舶试验结果的转向试验。Nomoto模型精度很低。MMG模型具有较高的精度。虽然非线性响应模型的精度低于MMG模型,但在不同情况下,当避让策略取一定角度时,碰撞问题的求解是可以接受的。为了获得更具体的结果,用式(15)评估不同模型的精度值。

式(15)中,SDδ仿真旋回圈直径,TDδ表示船舶实船试验旋回圈直径。表2给出了实验对比结果。
由以上分析可知,Nomoto模型可用于航向保持控制器的设计;非线性响应型模型适用于航迹保持控制和避碰;而MMG 模型具有较高的精度,可用于各种研究。
4.结论
本文阐述了模型选择在海洋研究中的重要性。建立并仿真了三种类型的船舶模型,分析了它们的特点。此外,还给出了一个更加精确的数学模型及其具体参数,可以作为其他研究人员和工程师的标准模型。最后,对其适用的问题进行总结,为避免不当使用提供参考。

图3 舵机伺服系统仿真框图
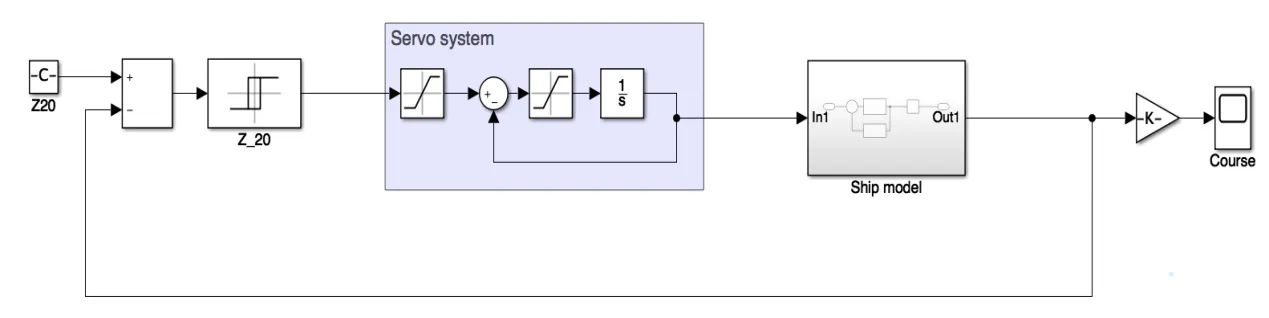
图4 Z-型实验仿真框图
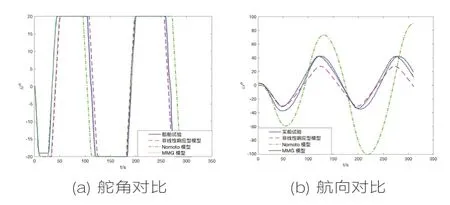
图5 Z-型实验结果对比
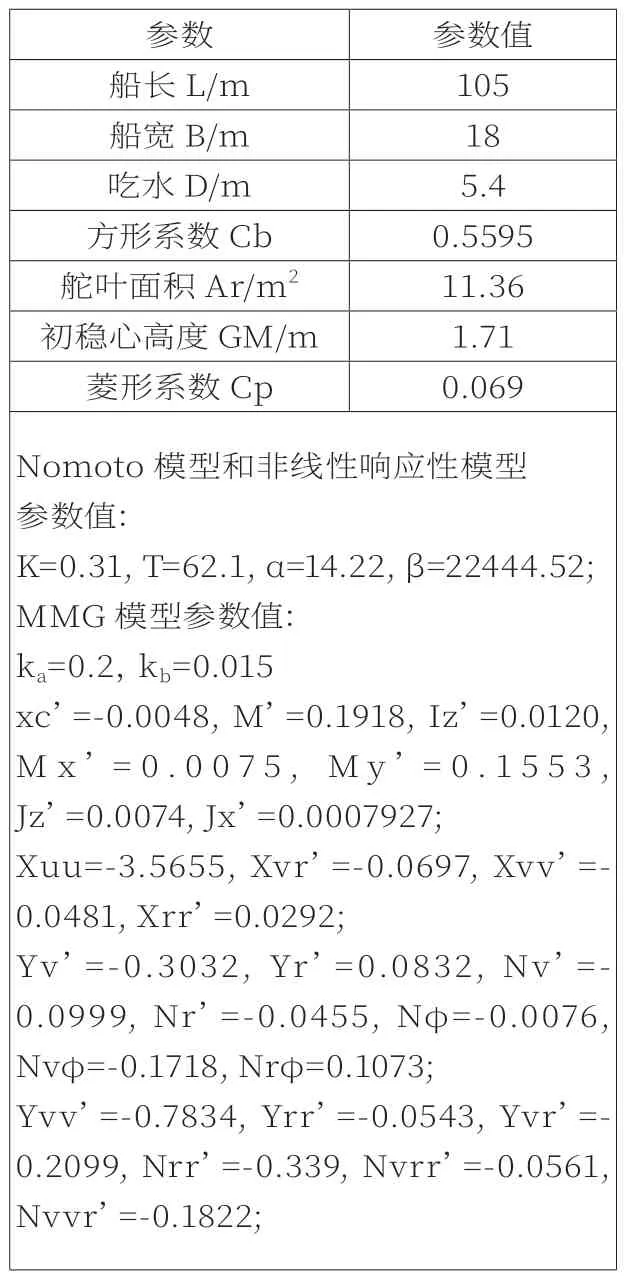
表1 育鲲轮主要参数

图6 旋回实验仿真框图
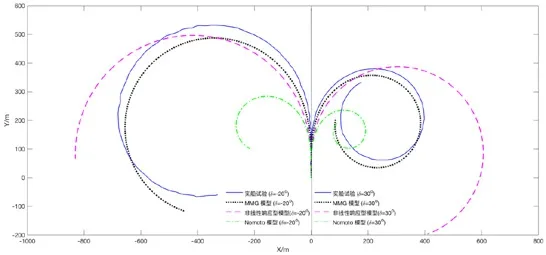
图7 旋回实验结果对比

表2 旋回圈直径对比
猜你喜欢
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
新世纪智能(高一语文)(2021年3期)2021-07-16
舰船电子工程(2020年4期)2020-06-19
自动化学报(2019年6期)2019-07-23
民用飞机设计与研究(2019年4期)2019-05-21
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
电子制作(2017年24期)2017-02-02
中国水运(2015年2期)2015-04-23