
基于Notch窄带波束形成的俯仰角估计仿真
2020-06-12 04:05梅新华
数字海洋与水下攻防 2020年2期
黄 鹏,梅新华
(1. 中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003;2. 中国船舶重工集团有限公司鹏力(南京)大气海洋信息系统有限公司,江苏 南京 210000)
0 引言
目前,目标俯仰角估计多采用水下传感器阵列多波束形成或高分辨方位估计技术[1],需要大孔径基阵或者复杂矩阵运算。在小尺度平台,如水中兵器或水下无人航行器上实现有困难[2]。Notch滤波器具有频率跟踪、相位估计的特性和自身调节参数的能力,并且窄带波束能对特定频段进行捕捉[3]。因此,Notch窄带波束形成比普通的波束形成方法具备更好的噪声或者干扰抑制的能力[4]。本文主要介绍基于应用于水下小平台的六元线列阵的Notch窄带波束形成的概念、结构和实现方法,以及在实测数据的仿真条件下与常规波束形成在目标俯仰角估计精度上的差异。
1 Notch滤波窄带波束形成概念
自适应Notch滤波器波束形成是先对输入信号进行自适应Notch滤波,获得正弦、余弦2个权值,然后通过这2个权值分别乘以与滤波器参考信号频率相同的正弦和余弦信号,重构出“干净”的输入信号[5]。重构时的正弦和余弦信号可设定任意幅度与相位,非常方便地对声压振速各通道的灵敏度与相位进行补偿[6]。自适应Notch滤波器波束形成的优点是不需要90°相移的窄带滤波器,以不高的采样频率对输入信号实现任意相移或时延,同时实现带宽极窄的窄带滤波,且运算量较小[7]。
自适应Notch滤波器的传输函数示意图如图1所示[8]。

图1 自适应Notch滤波器的传输函数示意图Fig. 1 Schematic diagram of the transfer function of adaptive Notch filter
图2是基于Notch滤波器波束形成方法的框图[9]。

图2 基于Notch滤波器的波束形成方法Fig. 2 Beam forming method based on Notch filter
本文以六元直线阵为例,先将原始输入信号进行低通滤波,再进行带通滤波,最后通过与参考信号的加权迭代后得到最终输入信号x1(t)、x2(t)…x6(t)。
Notch自适应的迭代算法如下。
1)对权向量赋初值。

2)两路正交的参考输入信号与权向量相乘,得到输出信号。
式中:xri(t)=[xci(t),xsi(t)]T,i=1~6是6路不同频率的参考信号。

3)求输入信号与输出信号的差值。

4)更新权向量。

如此可以得到每个采样点信号的权值。
算法的步长μ是一个比较关键的参量,对于仅有2个权的窄带Notch 滤波器而言,可以取得稍大一些[10]。最后可以得到Notch自适应滤波后的重构输入信号:

式中:τi为输入信号的时延;i为第i路信号,本文中试验数据共6路[11]。
将Notch滤波后的输出信号相加求和平方并归一化后得到其波束形成[12]:

2 测试信号窄带波束形成目标俯仰角估计精度
假设入射信号为sin(2πf0t),无噪声。
仿真时取中心频率f0=c/2d、阵元间距d=0.974 5 m、声速c=1 500 m/c、阵元数为6。
利用Notch滤波求权迭代的方法,得到不同方向(线阵正前方为0°方向)目标俯仰角估计精度如图3-7所示。

图3 -60°方向的目标俯仰角估计精度Fig. 3 Estimation accuracy of the pitch angle in -60°
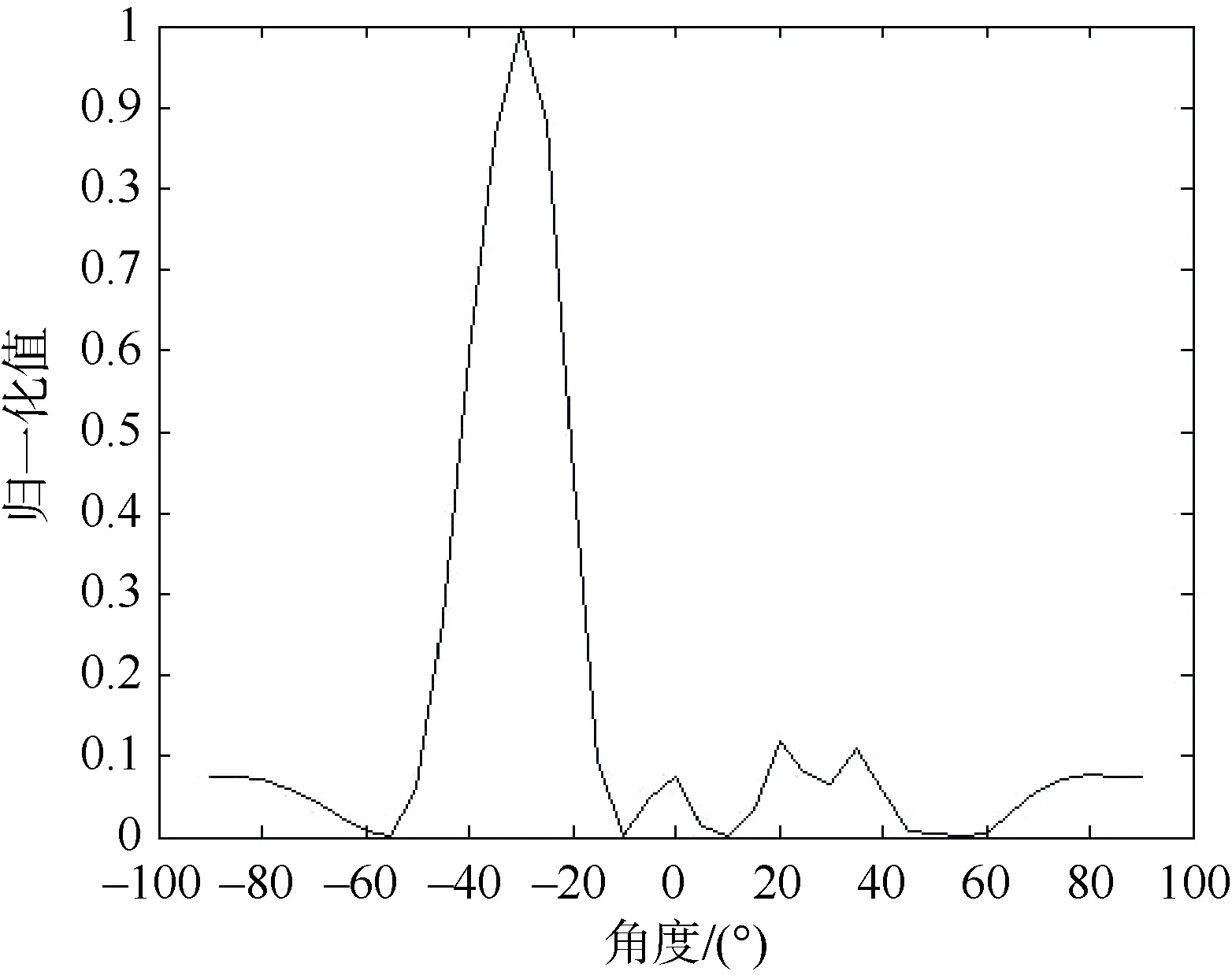
图4 -30°方向的目标俯仰角估计精度Fig. 4 Estimation accuracy of the pitch angle in -30°
由图3-7可以看出,在小角度情况下目标俯仰角估计精度高,而在大角度情况下目标俯仰角估计精度会变低,符合常规俯仰角估计精度变化规律。

图5 0°方向的目标俯仰角估计精度Fig. 5 Estimation accuracy of the pitch angle in 0°

图6 30°方向的目标俯仰角估计精度Fig. 6 Estimation accuracy of the pitch angle in 30°
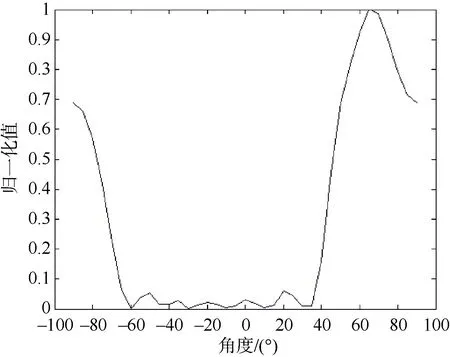
图7 60°方向的目标俯仰角估计精度Fig. 7 Estimation accuracy of the pitch angle in 60°
3 实测数据仿真分析
下面就相同实测数据,采用延时求和的常规波束形成与Notch窄带波束形成两种算法,进行目标俯仰角估计精度仿真分析,以探讨这两种算法的优劣。
实测数据仿真条件:
阵元距d=0.974 5 m;
声速c=1 500 m/c;
阵元数N=6;
采样频率fs=50 kHz;
带宽500~5 000 Hz;
降采样频率FS=5 kHz;
信号入射角度-90°~90°。
3.1 航速8.35 m/s实测数据的仿真情况
采用延时求和常规波束形成方法进行仿真的结果如图8所示。由图8可以看出目标正横方向上的俯仰角约为53°。目标从远处到正横方向历时约为340 s,故正横方向上的探测距离为340 s×8.35 m/s=2 839 m。
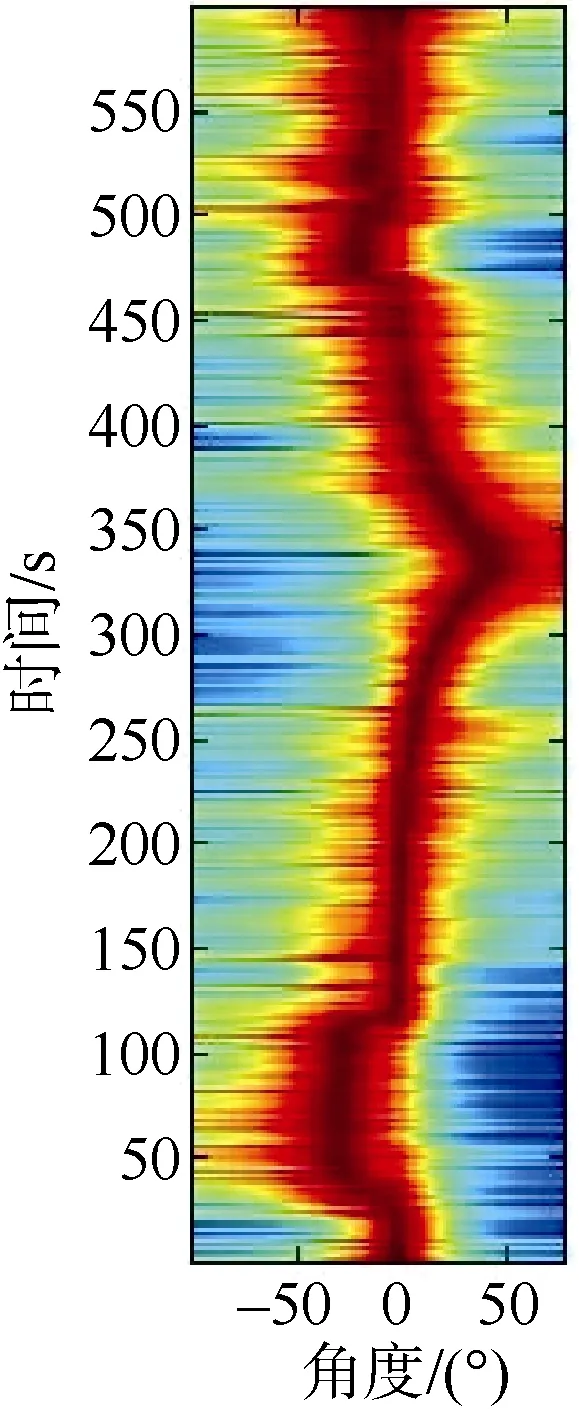
图8 航速8.35 m/s常规波束形成目标俯仰角估计云图Fig. 8 Nephogram of estimation accuracy of the pitch angle based on conventional beam forming at 8.35m/s
图9为航速约8.35 m/s的Notch窄带滤波算法仿真结果,由图9可以看出目标正横方向上的俯仰角约为50°。目标从远处到正横方向历时约为340 s,正横方向上的探测距离为340 s×8.35 m/s= 2 839 m。其中带宽分别为300~1 200 Hz、500~ 1 000 Hz、600~900 Hz、700~800 Hz。图9中,在450~500 s之间俯仰角的变化有断层,分析可能是受到外界的干扰所致。

图9 航速8.35 m/s不同带宽下窄带波束形成目标俯仰角估计云图Fig. 9 Nephogram of estimation accuracy of the pitch angle based on different narrow-band beam forming at 8.35 m/s
3.2 航速11.3 m/s实测数据的仿真情况
图10为航速约11.3 m/s的宽带延时求和仿真结果,由图10可以看出目标正横方向上的俯仰角约为42°。目标从远处到正横方向的时长约为340 s,正横方向上的探测距离为340 s×11.3 m/s=3 842 m。
图11为航速约11.3 m/s的Notch窄带滤波算法仿真结果,从图11可以看出目标正横方向上的俯仰角约为40°。目标从远处到正横方向的时长约为340 s,正横方向上的探测距离为340 s×11.3 m/s=3 842 m。其中带宽分别为300~1 200 Hz、500~1 000 Hz、600~900 Hz、700~800 Hz。

图10 航速11.3 m/s常规波束形成目标俯仰角估计云图Fig. 10 Nephogram of estimation accuracy of the pitch angle based on conventional beam forming at 11.3m/s
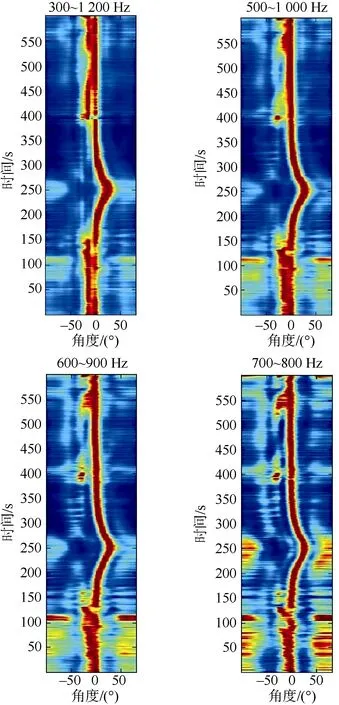
图11 11.3 m/s航速不同带宽下窄带波束形成目标俯仰角估计云图Fig. 11 Nephogram of estimation accuracy of the pitch angle based on different narrow-band beam forming at 11.3m/s
3.3 纯噪声实测数据分析
图12为纯噪声的宽带目标俯仰角估计精度图。

图12 纯噪声常规波束形成目标俯仰角估计云图Fig. 12 Nephogram of estimation of the pitch angle based on conventional beam forming of noise
图13为纯噪声的Notch窄带滤波算法目标俯仰角估计精度图。
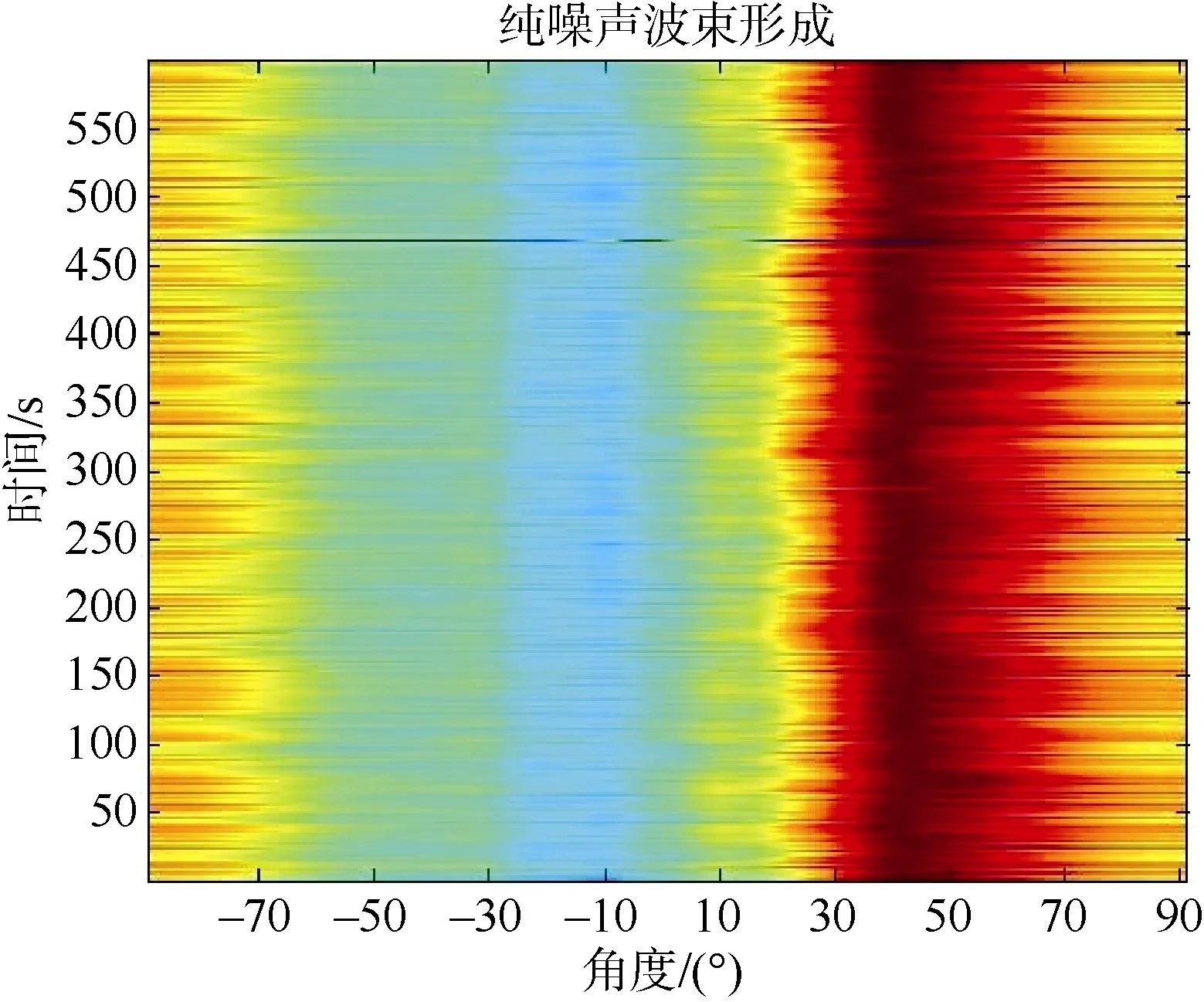
图13 纯噪声窄带波束形成目标俯仰角估计云图Fig. 13 Nephogram of estimation accuracy of the pitch angle based on narrow-band beam forming of noise
从图8、图10可以看出,常规波束形成的目标俯仰角估计云图中,目标俯仰角分布范围较大,目标俯仰角估计精度较低。
从图9、图11可以看出,窄带波束形成的目标俯仰角估计云图中,目标俯仰角分布范围较小,目标俯仰角估计精度较高;还可看出,在窄带波束形成的目标俯仰角估计中,带宽越宽,目标俯仰角估计精度越高。
图12、图13纯噪声目标俯仰角估计云图中未见明显的目标俯仰角信息。
4 结束语
本文主要介绍了基于线列阵的Notch窄带波束形成的结构、概念和实现方法。在基于天元线列阵的条件下,利用Notch窄带波束形成方法,对某海试数据分别进行了不同窄带带宽条件下的目标俯仰角估计;并将估计结果与常规波束形成方法得到的结果,与宽带延时求和方法得到的结果进行比对,得到以下结论。
1)基于Notch窄带波束形成的俯仰角估计方法要比常规波束形成的俯仰角估计方法的精度要高。
2)目标的俯仰角越小,目标俯仰角估计精度越高,在正横方向上目标俯仰角估计精度最高。
3)相同采样频率条件下,Notch自适应滤波窄带波束形成的目标俯仰角估计效果比宽带延时求和的效果更好。
4)Notch自适应滤波窄带波束形成中,带宽越宽,目标俯仰角估计的精度越高。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
水上消防(2022年1期)2022-06-16
海洋开发与管理(2020年2期)2020-09-10
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
广东造船(2016年3期)2016-07-13
中小企业管理与科技·中旬刊(2016年5期)2016-06-04
智能制造(2015年9期)2015-10-15
小天使·四年级语数英综合(2015年3期)2015-04-20
中国水运(2014年12期)2015-01-09
