
基于双边闭环Lyapunov泛函的采样控制系统稳定新判据
2020-06-11 13:26曾红兵翟正亮王
控制理论与应用 2020年5期
曾红兵翟正亮王 炜
(1.湖南工业大学电气与信息工程学院,湖南株洲 412007;2.电传动控制与智能装备湖南省重点实验室,湖南株洲 412007)
1 引言
在过去的几十年中,由于数字控制器的快速发展及其在安装使用中具有方便可靠的优势,采样控制系统受到了广泛的关注[1–9].在衡量采样控制系统的性能时,采样周期是一个十分重要的性能指标.采样周期越大对采样系统的通信速率,容量及带宽要求就越低,对系统硬件设备的要求也就越低.因此,在保证采样控制系统稳定的条件下,获得尽可能大的采样周期具有极大的实用价值.
近年来,许多用于采样控制系统稳定性分析的方法被提出,例如:离散时间方法[10]、脉冲系统方法[11]和输入时滞方法[12].由于没有充分考虑采样控制系统中时延的锯齿波结构特征,上述方法所得结果仍然具有较大保守性.为充分利用采样控制系统的锯齿波结构特征,一些学者基于输入时滞方法提出了区间依赖的Lyapunov泛函方法[13].
由于基于Lyapunov泛函方法计算的结果具有一定的保守性,因此,许多方法被用来减小估算值和实际值之间的差距.例如:自由权矩阵方法[14]、积分不等式方法[15]和凸组合方法[16]等.这些方法从界定Lyapunov泛函的导数方面降低了所得稳定性条件的保守性.
从构造Lyapunov泛函的角度,文献[7]中提出了时间依赖离散型Lyapunov泛函方法,文献[17]利用自由矩阵积分不等式构造时间依赖离散型Lyapunov泛函,在此基础上到了保守性较小的稳定性判据.文献[9]提出了一种闭环Lyapunov泛函方法,由于这种闭环型Lyapunov泛函只要求在采样点大于零,放宽了Lyapunov泛函的限定条件,因而具有更小的保守性.因此,这一方法被广泛应用于采样控制系统的分析和设计中.例如,文献[3]采用闭环型Lyapunov泛函研究了变周期采样系统的指数稳定性问题.由于文献[3]只考虑区间tk到t的信息,因而所得到的条件存在较大的保守性.最近,文献[1]提出了一种双边闭环型Lyapunov泛函,这种泛函考虑了区间tk到t和t到tk+1的信息,因而可以显著降低稳定性分析的保守性.
自从完全时滞分割法在文献[18]中被用来分析时滞系统的稳定性以来,只有少量的学者将这种分割方法用到采样混沌同步控制系统的稳定性分析和设计[19].但是,文献[19]只是对区间tk到t进行了分割处理,并没有考虑区间t到tk+1之间的信息,所以得到的结论具有较大的保守性.另一方面,尽管完全时滞分割法可以显著降低稳定性分析结果的保守性.但是,随着时滞分割段数的增多,计算复杂度将大大增加,所以这也给分割算法的推广形成巨大的阻力.
基于上述讨论,本文基于双边闭环型Lyapunov泛函的基本框架,只对区间[tk,t]和[t,tk+1]分别进行二分处理.在此基础上,构造新的双边闭环型Lyapunov泛函并引入新的系统状态方程,应用自由矩阵积分不等式方法得到了改进的稳定性判据.不同于文献[18],本文通过引入分割系数α1和α2实现对采样区间的非均匀分割,这样的分割方式更加灵活,而且计算复杂度并不会随着分割系数的大小而改变.最后,通过数值实例对所提的方法进行了验证,计算的结果表明,本文的方法可以有效地减小稳定性分析的保守性.
本文采用如下标号:上标“−1”和“T”分别表示矩阵的逆和转置;Rn表示n维欧几里得空间;代表n×m维的实矩阵;P >0 表示矩阵是正定的;diag{…}表示块对角矩阵;I和0分别代表合适维度单位矩阵和零矩阵;“∗”表示对称矩阵中的对称项;He{X}=X+XT.
2 问题描述
考虑如下线性系统:

式中:x(t)∈n是系统状态以及u(t)∈是控制输入,是已知的系统矩阵.令tk,k=0,1,2…表示采样的更新时间,满足

式中:hk是采样的周期,h1和h2分别为采样周期的下界和上界.
采用如下状态反馈控制器:


本论文的主要目标是获得保证闭环系统(4)稳定的最大允许采样周期,从而降低采样控制系统稳定性分析的保守性.
3 稳定性判据
为了降低稳定性条件的保守性,本文引入分割系数α1,α2∈(0,1)将区间[tk,t]和[t,tk+1]分别分割为[tk,t−α1τ(t)]∪[t−α1τ(t),t]和并在此基础上构建新的双边闭环型Lyapunov泛函.为简化描述,首先定义以下符号:


由于采样控制系统具有在两个连续采样点之间控制信号保持不变的特性.为进一步降低稳定判据的保守性,本文引入如下两个分割后的系统状态方程:

引入的系统方程(5)–(6)的作用将在定理1和推论1的比较中凸显出来,首先给出以下稳定性判据.


那么闭环系统(4)是渐近稳定的.
证首先,构造如下双边闭环型Lyapunov泛函:

对泛函(9)求导得

应用文献[1]中引理1给出的自由矩阵积分不等式对J1–J4进行界定,可得

类似于文献[1],对系统(4)从tk到t −α1τ(t),t−α1τ(t)到t,t到t+α2¯τ(t)以及t+α2¯τ(t)到tk+1分别进行积分,并引入自由矩阵Yi(i=1,2,3,4),可以建立以下零等式:

同理,对式(10)–(13)从tk到t −α1τ(t),t −α1τ(t)到t,t到t+α2(t)以及t+α2(t)到tk+1分别进行积分,并引入合适维数矩阵Yi(i=5,6,7,8),可以构造出如下零等式:
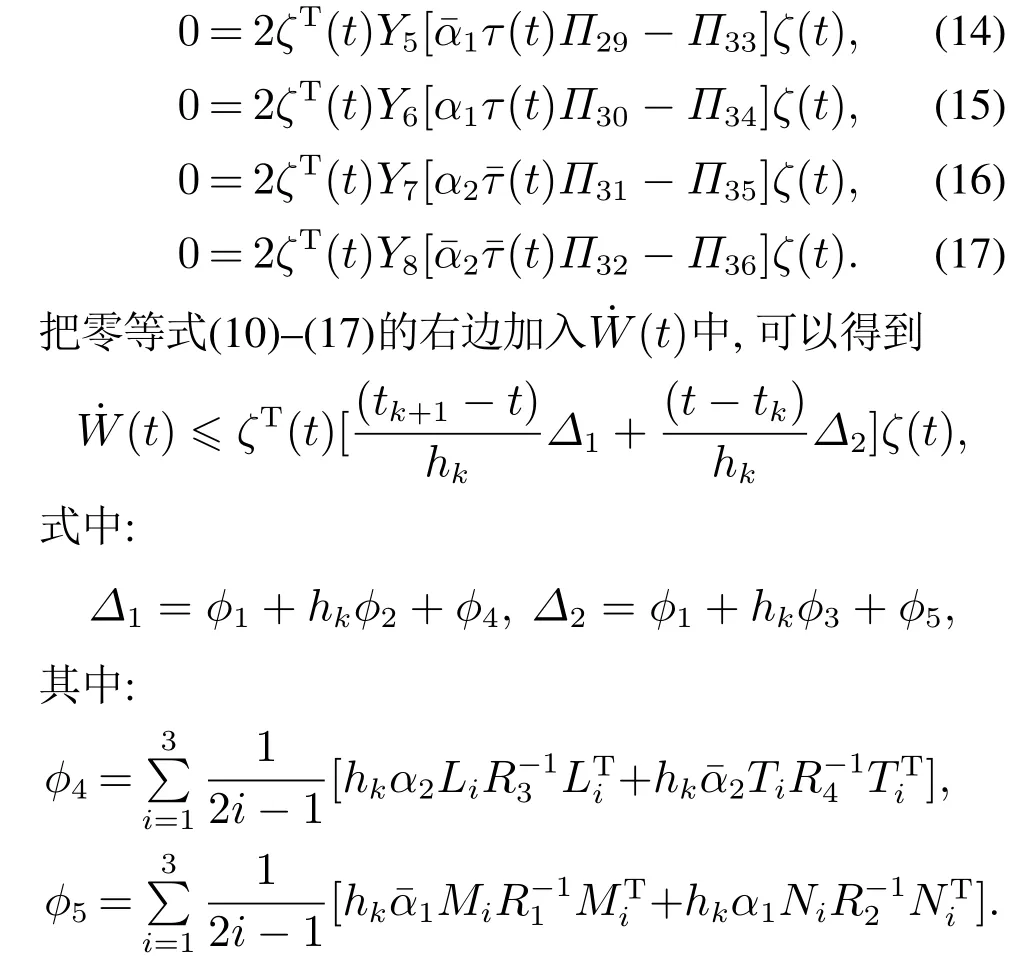
若∆1<0和∆2<0,则˙W(t)<0,由Lyapunov稳定性理论可知,系统渐近稳定.由Schur补引理可知,LMI(7)–(8)分别等价于∆1<0 和∆2<0. 证毕.
注1在泛函(9)中,注意到Vi(tk)=Vi(tk+1)=0,i=1,2,3,4,因而V(t)=Vj(t)满足闭环函数条件[9].在构造闭环函数V(t)的过程中,由于同时考虑了区间[tk,t]和[t,tk+1]信息,因而本文把这一泛函称之为双边闭环型Lyapunov泛函.
注2本文应用了文献[1]中的自由矩阵积分不等式方法来处理Lyapunov泛函导数中出现的二次型积分项.在对二次型积分项的逼近估计中,自由矩阵积分不等式方法具有明显的优势.比如说不需要考虑如文献[20]中Wirtinger不等式带来的逆凸问题,在采样控制系统中的应用也更加方便.并且与其他积分不等式相比,应用自由矩阵积分不等式方法得出的结果也具有更小的保守性.
注3通过将采样区间tk到t和t到tk+1分别用分割系数α1和α2分割成两段,定理1充分利用了分割后的状态信息和系统状态信息.系统状态方程(5)–(6)的引入,有效降低了采样控制系统稳定性分析的保守性.
为了凸显系统状态方程(5)–(6)的作用,在闭环函数的基础上,如果仅利用分割后的状态信息而忽略分割后的系统状态信息,可得到以下推论.


且Γ,Πj,j=13,14,…,36,定义于定理1.
证构造如下双边闭环型Lyapunov泛函:

然后,类似于定理1的推导过程可以得到推论1,这里不再赘述正. 证毕.
注4本文可以通过调节α1和α2来获得尽可能大的采样周期.为得到α1和α2的最优值,下面,本文给出具体的搜索算法:
1)给定搜索步长∆α,令α1=∆α,α2=∆α.然后,求解定理1中的线性矩阵不等式获得相应的最大采样周期h2,并令
2)令α2=α2+∆α,应用定理1求得相应的最大采样周期h2.若h2>h∗,则h∗=h2,
3)若α2>1,则α2=0,α1=α1+∆α;否则,跳转到第2)步;
4)若α1<1,则跳转到第2)步;否则,输出分割系统的最优值以及相应的最大采样周期h∗.
3.1 数值实例
本文通过以下两个数值例子来验证所提方法的有效性和优越性.
例1考虑闭环系统(4)具有以下的系统参数:

在变周期采样情况下,采用本文所提出的方法计算得出的结果和其他已有文献的结果列于表1中.从表中可以看出,本文所提出的方法可以得到更大的采样周期,这就说明本文所提出的分析方法具有更低的保守性.在和文献[1]的对比中,本文可以发现基于分割法改进的闭环函数的有效性.特别是系统状态方程(5)–(6)的引入,有效地降低了稳定判据的保守性.

表1 当h1=10−5时,保证系统稳定的最大采样周期h2Table 1 The maximum value of h2 under aperiodic samplings with h1=10−5
例2考虑闭环系统(4)具有以下的系统参数:
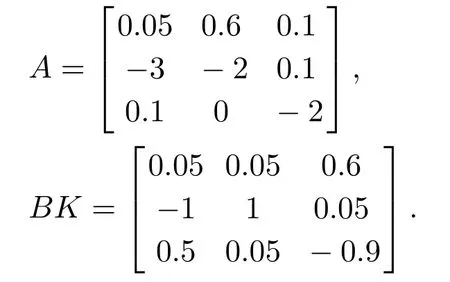
对于这个例子,采用本文所提出的稳定性判据和其他现有方法计算得到的结果列于表2中.从表中可以看出,本文提出的稳定性判据得到的分析结果要明显优于文献[1].此外,通过对定理1和推论1的计算结果的对比可知,对于分割后的系统状态信息的有效利用可以显著降低稳定性分析的保守性.

表2 当h1=10−5时,保证系统稳定的最大采样周期h2Table 2 The maximum value of h2 under aperiodic samplings with h1=10−5
4 结论
本文基于双边闭环型Lyapunov泛函讨论采样控制系统的稳定性问题.通过对采样区间进行分割处理,并且充分利用分割后的系统状态信息和引入新的系统状态方程,建立了采样控制系统的稳定性条件.仿真实验结果表明本文所提出的方法优于现有文献的结论.
猜你喜欢
煤气与热力(2021年6期)2021-07-28
铁道建筑技术(2021年4期)2021-07-21
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
兵器装备工程学报(2021年1期)2021-02-22
北京航空航天大学学报(2020年10期)2020-11-14
经济数学(2020年1期)2020-06-24
北方工业大学学报(2019年5期)2019-03-30
福建中学数学(2018年7期)2018-12-24
上海师范大学学报·自然科学版(2018年3期)2018-05-14
价值工程(2018年13期)2018-05-03
