舷外有源诱饵干扰效果动态评定方法研究∗
2020-06-11 14:29
舰船电子工程 2020年3期
(中国人民解放军92785部队 秦皇岛 066000)
1 引言
舷外有源诱饵自20世纪80年代初问世以来,经历了几代产品的改进和技术创新,已初具规模。目前,舷外有源诱饵干扰效果试验方法是基于末制导雷达定点设置的静态试验方法,由于该评定方法只关心最终时刻导弹是否脱靶,未体现导弹飞行的动态效应,没有关注导弹末制导雷达跟踪质心至舰、舷外有源诱饵分离的过程。本文通过论证研究,提出了一种新的舷外有源诱饵干扰效果评定方法。通过将末制导雷达静态试验获取的干扰效果数据进行动态转化,模拟导弹攻击与诱饵反导过程,以末制导雷达的模拟动态效果评定舷外有源诱饵的干扰效果。
2 干扰原理
舷外有源诱饵质心干扰与箔条质心干扰原理[1~2]大致相同,都是利用导弹末制导雷达跟踪真假两个目标能量中心(质心)这一特点,在末制导雷达距离波门内除被保护的目标舰外再形成一个假目标(即舷外有源诱饵)。舷外有源诱饵通过接收到的末制导信号,经处理放大后,转发给末制导雷达,使末制导雷达跟踪真、假目标的能量质心。舷外有源诱饵转发的信号回波大于被保护目标舰的回波,随着时间推移和目标舰的机动位置变化,末制导雷达从跟踪能量质心最终转向跟踪舷外有源诱饵,达到保护目标舰的效果。干扰原理如图1所示。
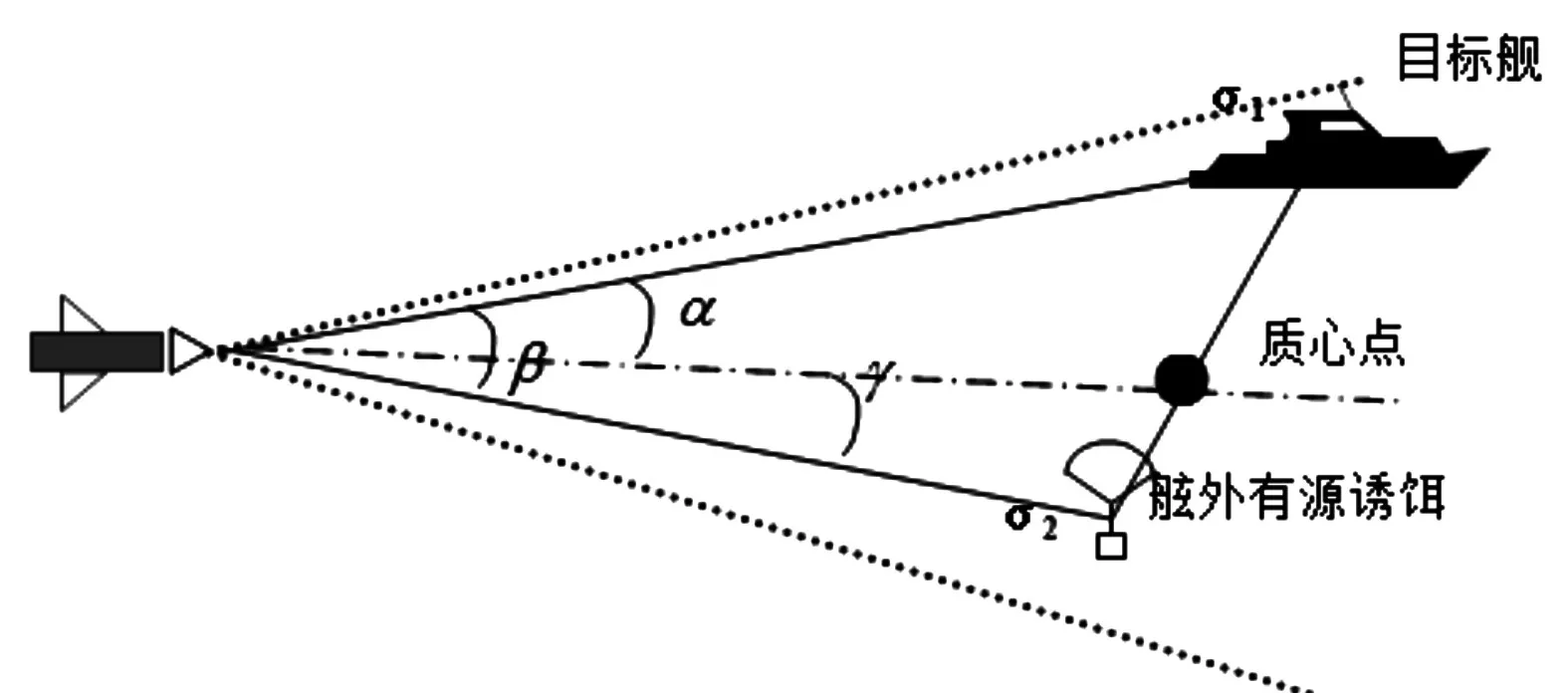
图1 舷外有源锈饵干扰机理示意图
设目标舰RCS为σ1,舷外有源诱饵转发的虚拟假目标有效RCS为σ2,末制导雷达电轴指向质心点,质心点与目标舰相对于末制导雷达的夹角为α。

质心点与舷外有源诱饵相对于末制导雷达的夹角为γ。

目标舰与舷外有源诱饵相对于末制导雷达的夹角为β。
从式(1)、(2)可以看出,当σ2>σ1时,γ<α,即,末制导雷达电轴指向的质心点偏向RCS较大的那个目标。因此,为获得更好的质心干扰效果[3~4],就要让舷外有源诱饵转发的虚拟假目标的有效RCS足够大,信号幅度足够强,才能使末制导雷达跟踪到虚假目标上。所以,舷外有源诱饵的干扰原理为角度、距离干扰,通过在被掩护目标位置附近设置一个或多个大小不一的假目标,干扰末制导雷达的测角通道和测距通道,使导弹偏离正确攻击目标,起到掩护目标舰的目的。
3 试验方法
如图2所示。末制导雷达和定位雷达岸基架设,目标舰从就位点向发射点航渡,岸基末制导雷达听令加高压跟踪目标舰。目标舰侦察设备告警后立即发射舷外有源诱饵弹实施干扰,目标舰按系统制定的机动规避方向实施机动[5~6]。
受到干扰的末制导雷达和定位雷达分别记录试验开始后一定时间内各时刻目标舰与舷外有源诱饵所形成的质心点的距离、目标舰与质心点的航偏角、目标舰与舷外有源诱饵的方位和距离。
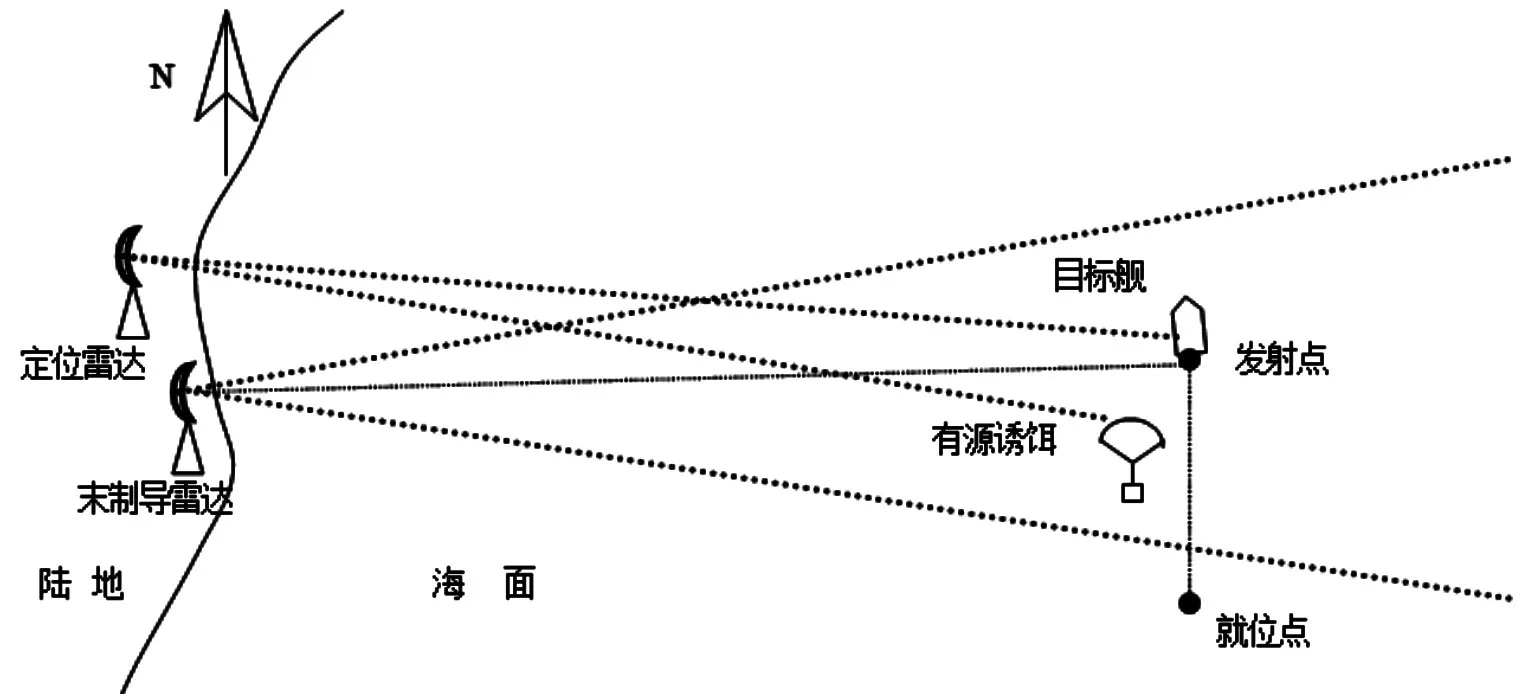
图2 试验方案示意图
4 干扰效果动态推算
4.1 舷外有源诱饵有效干扰时间的确定
目前,外军反舰导弹的自导距离范围一般在5km~24km。对抗反舰导弹的舷外有源诱饵有效干扰时间可用公式(3)计算。

式(3)中,舷外有源诱饵有效干扰时间为T;末制导雷达开机距离为Rk;导弹失控距离为Rs;导弹飞行速度为vd。
导弹飞行速度vd设为300m/s,导弹失控距离Rs设为300m,末制导雷达开机距离以5km~24km计算,舷外有源诱饵有效干扰时间如表1所示。
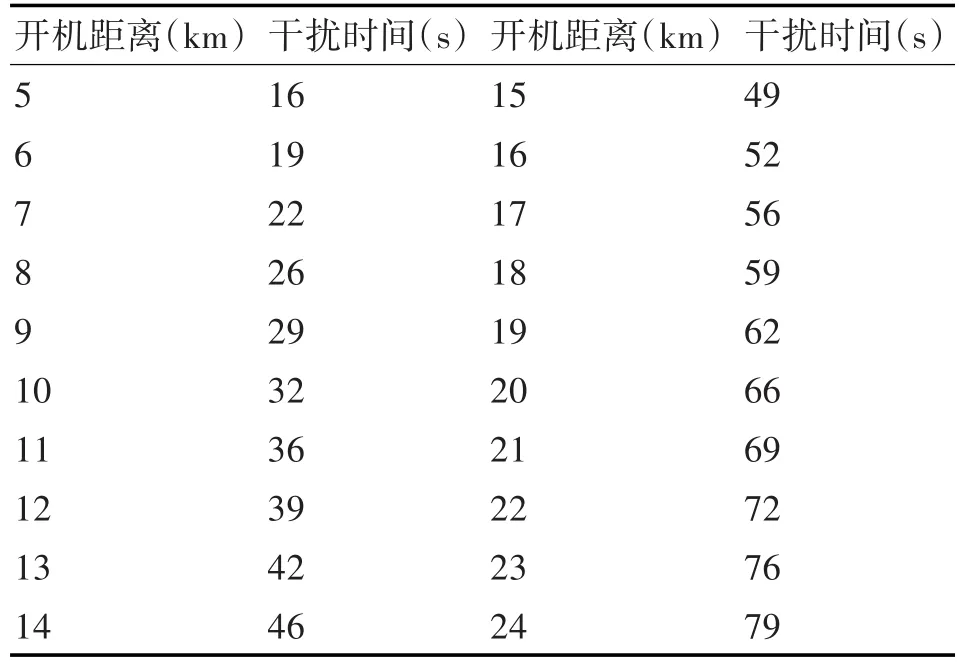
表1 末制导雷达开机距离对应舷外有源诱饵有效干扰时间表
4.2 干扰效果动态推算方法
干扰效果动态推算[7],主要分为以下几步:
1)用定位雷达、末制导雷达、北斗定位设备的测量结果数据计算出动态推算的导弹末制导雷达开机位置(5km~24km范围内);
2)将静态测量结果数据处理后,进行动态转化,以模拟导弹向质心点飞行的过程;
3)当末制导雷达波束不能同时包容目标舰和舷外有源诱饵两个目标时,即产生面目标效应时,进行推算模拟,计算目标分离过程。当目标舰和舷外有源诱饵分离完成,即一个目标被偏出雷达波束后,一次评定计算结束;
4)若未出现目标舰和舷外有源诱饵分离,则通过计算导弹脱靶量[8~10]判定干扰效果。
干扰效果动态推算方法示意图见图3。
图3 干扰效果动态推算方法示意图
图中字符含义:
Rmj为末制导雷达与目标舰之间的距离;Rmz为末制导雷达与质心点的距离;α为静态航偏角;∠e为舷外有源诱饵、目标舰相对定位雷达的夹角;∠g为目标舰相对末制导雷达的方位角;Rsj为定位雷达与目标舰的距离;Rsy为定位雷达与舷外有源诱饵的距离。
α'为动态航偏角的各时刻计算值;θ'为动态舷外有源诱饵与目标舰的夹角的各时刻计算值。
动态推算方法如下:
t=0时刻:末制导雷达听令开机,末制导雷达和定位雷达的电轴均对准目标舰。t'时刻,舷外有源诱饵开机,释放干扰,定位雷达、舷外有源诱饵、目标舰构成三角形。
t<t'时刻:末制导雷达电轴始终指向目标舰。
t≥t'时刻:各目标位置变化如图3所示。
求α'、θ':步骤如图4、图5所示。
图4 计算α′步骤
计算公式如下:

图5 计算θ′步骤
计算公式如下:
4.3 切割算法
切割过程[11~12]如下。
动态处理时,末制导雷达模拟动态导弹飞行,雷达波束线宽逐渐变短,舷外有源诱饵与目标舰的夹角逐渐变大,因末制导雷达跟踪能量中心,其航偏角逐渐变大,RCS较小的目标将被逐步偏离出雷达波束。这个偏出的过程就是末制导雷达波束对RCS较小的目标的切割过程。
当目标舰与舷外有源诱饵的RCS能量变化比发生变化后,末制导雷达跟踪质心点同步发生变化,末制导雷达的动态航偏角也需要同步进行修正。
切割算法过程如图6所示。

图6 末制导波束内RCS较小的目标被偏出波束的切割算法
5 干扰效果判定准则
通过计算,得出t时刻目标舰、舷外有源诱饵与末制导雷达形成的夹角θ。设导弹飞行速度vd,则Δt时刻后,末制导雷达模拟导弹向质心点飞行的距离为vd·Δt。
由公式计算出Δt时刻后,目标舰、舷外有源诱饵与末制导雷达形成的夹角θ'。依据Δt时刻前静态末制导雷达的航偏角推算出导弹飞行Δt时刻后末制导雷达的航偏角α'。
6 干扰效果结果分析
通过上述实际计算分析目标舰和舷外有源诱饵分离过程可以发现,从末制导雷达5km开机到24km开机,每一次末制导雷达开机的推算过程所出现的目标舰和舷外有源诱饵分离点是有明显差异的,如果末制导雷达8km开机进行推算时,目标舰和舷外有源诱饵分离点出现在13s~15s;末制导雷达9km开机进行计算时,目标舰和舷外有源诱饵分离点就出现在15s~17s;在末制导雷达24km开机进行计算时,目标舰和舷外有源诱饵分离点则可能出现在50s~60s。每一次目标舰和舷外有源诱饵分离后末制导雷达跟踪目标舰还是舷外有源诱饵,结果可能是有差异的,这说明利用海上一个航次的干扰效果试验数据进行末制导雷达不同开机距离的干扰效果推算计算是有意义的。
7 结语
舷外有源诱饵干扰是近年来美军舰载电子对抗领域的重要发展方向。本文提出的干扰效果动态评定方法,对舰艇装备试验具有较大的参考意义,也为今后更深层的战术使用研究打下了一定的基础。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
客联(2022年4期)2022-07-06
科普童话·神秘大侦探(2022年4期)2022-05-26
北京航空航天大学学报(2021年4期)2021-11-24
家庭影院技术(2021年9期)2021-11-05
文学少年(低幼版)(2019年5期)2019-07-25
电子技术与软件工程(2019年8期)2019-07-16
中学生数理化·教与学(2019年5期)2019-06-06
阅读与作文(小学低年级版)(2017年10期)2017-10-27
广西文学(2015年9期)2015-10-24