
热轧H型钢智能钻锯锁生产线研究
2020-06-08 02:04万春红范力栋段兴盖张恩寿杨彩玲
昆钢科技 2020年2期
万春红 钱 瑾 范力栋 段兴盖 张恩寿 杨彩玲 李 润 庄 园
(1.昆明电器科学研究所;2.昆钢推进用钢产业发展工作组)
1 引言
热轧H型钢侧向刚度强、抗弯强度大,在工业建筑、石油化工、电力生产、船舶及机械制造领域应用广泛;国内有超过2万家的钢结构生产加工企业,规模以上的达3 000余家,大量采用钻锯锁传统加工设备;在《中国制造2025》背景下,钢结构产品的生产加工朝着提高效率和生产管理水平,降低成本和人工劳动强度的方向发展。
国内虽有成熟的钻、锯、锁单机数控设备,尚没有成套的智能化生产线,传统生产线的每个工序,均需专人操作,工件在工序间流转均为行车或平车搬运,用人工较多、生产效率低;国外生产线制造厂家,如意大利的FICEP公司,由于起步早,其生产线及设备智能化相对成熟,可显著降低劳动强度、提高生产效率,但价格昂贵。
与国外同类设备相比,国内单机数控设备在功能、效率方面存在差距,但具有价格经济的优势,通过开展工艺设备优化及成套组合生产线研究,集成和研发生产线智能管控系统,实现热轧H型钢钻锯锁生产线的智能化,可有效提升钢结构企业的经营效益,减少安全生产事故,对热轧H型钢在建筑及装备制造行业的推广应用,延伸钢铁企业钢材的加工配送具有重要的现实意义。
2 传统生产线与智能生产线的对比
2.1 传统热轧H型钢钻锯锁加工生产线流程
传统热轧H型钢的生产加工可大致分为备料、锯切、钻孔、锁口加工和堆料下移五个步骤。
(1)备料:人工操作桥式起重机将成捆打包的未加工的热轧H型钢放置在备料口,由人工将其打开并通过悬臂吊(或直接)将单根H型钢放置到数控带锯床口前。
(2)锯切:夹紧热轧H型钢,对其进行测量后,移动到需要锯切的位置进行锯切加工,加工好后,经人工控制悬臂吊,把热轧H型钢放置到钻孔加工设备前。
(3)钻孔:采用三维数控钻孔床,与锯切加工类似,夹持工件,测量工件、定位、加工,加工好后,继续由人工操作送往锁口加工。
(4)锁口加工:采用数控铣削锁口加工机床,与锯切步骤类似。
(5)堆料下移:由人工将加工完成的热轧H型钢成捆打包,经人工操作桥式起重机,将其堆放到指定位置。
国内几乎所有钢结构生产厂家均采用传统加工生产流程,且该生产流程在20年前就已投入使用至今。
2.2 热轧H型钢智能钻锯锁加工生产线流程
在热轧H型钢智能生产线中,根据钻锯锁三种单机设备的工效匹配和组合,以采用两锯、一钻、两锁组成生产线为例,其工艺流程和生产线布置如图1、图2所示。
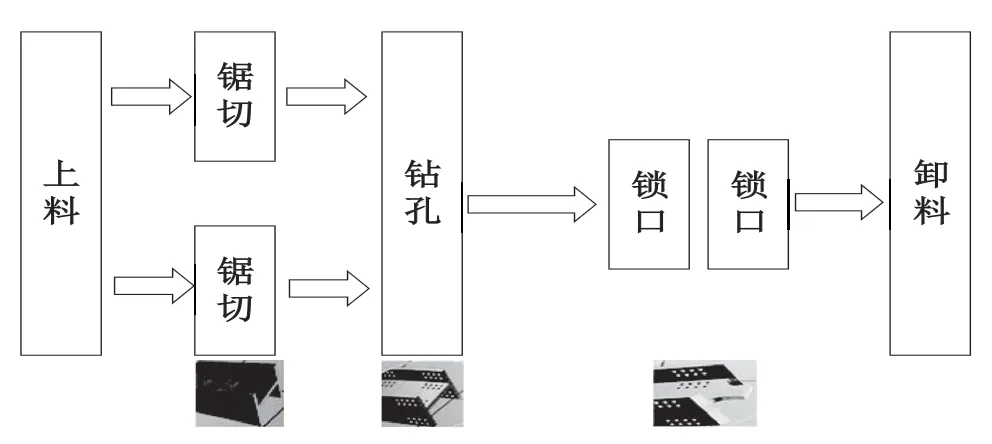
图1 热轧H钢智能钻锯锁生产线工艺流程图
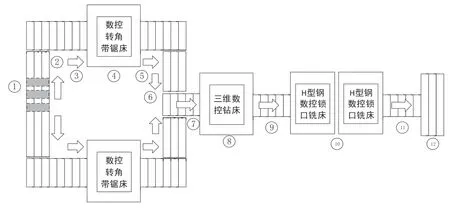
图2 热轧H型钢智能钻锯锁加工生产线布置图
生产线工序加工流程为:
上料工人操作行车把H型钢工件放置在上料架上→辊道链条自动横向推动H型钢工件至纵向辊道→辊道自动运输H型钢工件至数控转角带锯床,准备锯切→数控转角带锯床对H型钢工件按程序单机作业锯切→辊道自动将锯切后的H型钢工件运输到三维数控钻床,准备三维钻孔→三维数控钻床对H型钢工件进行三维钻孔→辊道自动将三维钻孔后的H型钢工件运输到H型钢数控锁口铣床,准备锁口→H型钢数控锁口铣床对H型钢工件进行锁口→辊道自动把锁口后的H型钢运输至卸料架→卸料工人操作行车将H型钢卸下。
2.3 传统加工流程和智能化加工流程对比
国内现有传统的热轧H型钢钻锯锁生产线,每个工序均需有专人操作,工件在工序间流转均为行车或平车搬运,用人工较多(操作工和辅助工),生产效率低;以国产一锯一钻一锁设备组成的传统生产线为例,三工序各自分开,设备投资约300万元人民币,产能约10 000 t/年,用工约7人/班。
国外智能化生产线,以中建钢构广东公司2017年新上的钻锯锁生产线为例,整条生产线包括一锯一钻一锁设备、全套纵横传输辊道及电控设备、软件,总投资约1 300万人民币,产能30 000 t/年,除两端原材料上料、卸料需人工操作外,长度尺寸锯切、三维钻孔、机械锁口三道工序及工件在工序间流转,均为智能化程序控制,不需人工干预,用工少(2人/班),生产效率高。
与传统热轧H型钢钻锯锁生产线相比,智能生产线至少可提高生产效率2.5倍以上,减少用工50 %,预计增加投资400万元,远低于进口设备价格,在提高工效、降低劳动强度和节约成本方面具有显著优势。
3 热轧H型钢智能钻锯锁生产线控制系统关键技术
3.1 主加工设备电气控制系统的集成技术
三维数控钻床、数控带锯床、数控铣削锁口机的电气控制系统核心是数控系统,高端数控机床的数控系统,多采用国外公司产品,目前主要数控系统厂商,如FANUC、西门子、华数8系列、凯恩帝等,以西门子数控系统为例,整个系统采用PROFIBUS DP现场总线连接。
现场总线抗干扰性强、精度高,控制及反馈等信号均通过总线传递,布线简化、安全可靠、维护方便,采用全数字通讯方式,克服了传统脉冲、模拟量传递中易受干扰的缺陷;控制系统支持MODBUS,可通过RS232C在上位计算机监控设备运行情况。
现场总线控制在欧美非常流行,在国内目前还是少数高端应用,总线控制下的每一个数控轴均采用全数字通讯传输信号,可通过总线任意设置进给速度及目标值,也可通过总线监控每一个轴的运行状态,轴数越多总线控制优势越明显。
现场总线控制系统具有开放性,通过编程可实现任意轨迹的控制,可实时修改定位目标值,可即时修正腹宽、腹高的实时检测值;通过现场总线技术集成数控钻锯锁设备,可实现生产线的全自动、智能化和高效运行。
3.2 纵横向料道输送系统的伺服控制技术
纵向料道和横向料道是热轧H型钢二次成套加工生产线中的重要设备,可减少吊车、行车的使用频次,提高生产的安全性和效率,集成编码传感器和伺服电机系统,通过热轧H型钢输送控制系统,完成纵向料道和横向料道的自动控制。
纵向料道安装在机床的进料端和出料端,用于支撑工件。纵向料道由料道支架、支承辊、侧定位辊等组成。在料道支架定位侧安装有定位辊,为热轧H型钢定位基准用。纵向料道中含动力料道和非动力料道,动力料道带有液压浮动装置,以便输送,同时具备工件侧推装置,自动扶正热轧H型钢,所有纵向料道的送料辊都是淬火后磨削加工而成,避免侧推过程中送料辊表面刮伤后形成阻力。
横向料道具有垂直举升和横向移动的功能,多条横向料道的移动是同步进行的,它的作用是解决H型钢的横向转移,并在生产线中兼有储料功能。
由两种料道动力设备的自动输送控制系统受总线控制,可通过系统进行调节料道的传输速率,并且主设备中的传感器信号接入自动传输系统,通过设备的具体工作状态、效率进行自动调整,具体通过PLC、变频器、伺服电机等电气系统实现速率的控制。
3.3 智能生产线参数信息的数据采集技术
对热轧H型钢钻锯锁数控设备、料道输送系统的状态参数和生产信息的数据采集及其应用,是实现整条智能生产线集中监控的前提和基础。
一般来说,数据采集系统需采集生产线的“人、机、料、法、环”各类数据,其中“人、料”的信息采集,采用条码、RFID等方式来完成,“法”主要采集工艺实现、检验检测等信息,“机、环”两方面的数据采集,又以“机”为重中之重[1]。
热轧H型钢智能钻锯锁生产线控制系统数据采集的参数包括:钻锯锁数控设备参数、料道输送系统参数和生产信息参数等,具体参数如表1所示[1][2]。

表1 热轧H型钢智能钻锯锁生产线控制系统数据采集的参数
通过热轧H型钢智能钻锯锁生产线的集中监控系统(SCADA),以现场总线与现场数控设备、料道输送控制系统组网通信,通过工业以太网与MES系统通信,通过OPC技术[3],完成来自三方面数据源的数据采集任务,一是钻锯锁数控设备的内部数据;二是外加传感器的外部数据;三是MES系统的生产管理信息数据。
完成对热轧H型钢智能钻锯锁生产线的数据采集后,通过数据处理、数据传输、特征提取、状态识别[2],完成对生产线设备的控制,以及与生产任务、质量、生产进度等信息相关的联合分析,为生产线全生命周期预防性维护提供数据信息支持,提升生产线的运行可靠性、可控性和生产效率,保障生产线运行稳定、可靠、安全。
3.4 搬运机器人在智能生产线的应用技术
随着工厂自动化水平的提高,工业机器人在数控机床领域的应用越来越多,服务数控机床的工业机器人大体上分为:上下料和换刀两大类。机床上下料机器人采用工业机器人替代操作工,自动完成在加工过程中工件的自动抓取、上料、下料、装卡、工件移位翻转、工件转序等一系列上下料工作任务,能够极大的节约人工成本,提高生产效率[4]。
搬运机器人的实现依赖于强大的单片机控制技术,其关键技术主要涉及自动寻迹技术、自动避障技术、传感器识别技术、远程无线通信技术等。
自动寻迹主要解决方案有激光导引、磁导引和轨道运行作为搬运机器人的向导,指引搬运机器人的运动;其中轨道运行将机器人的运行路线固定于轨道上,相比激光导引和磁导引不具灵活性;激光导引利用激光通过发射板反射回来的信号判断与反射板的距离,搬运机器人自动判断是否到达预定位置或需要转向;磁导引主要是通过在搬运机器人路径底下埋磁钉,搬运机器人通过对磁传感器的数据进行判断是否到达或需要转向。
自动避障技术依赖于自动寻迹技术和后台强大的运算分析能力,寻找最优的路径进行搬运。后台通过加持AI算法,持续对搬运机器人的状态及位置信息进行跟踪,将优化好的路径通过无线通信技术发送至搬运机器人,搬运机器人按照最优化的路劲进行搬运,提高效率和减少故障发生。
传感器识别技术是搬运机器人运行的关键技术,触觉传感器、距离传感器、磁传感器等是搬运机器人必备的传感器。触及传感器多用于轨道式搬运机器人,用于判断是否需要转向或脱轨;距离传感器多用于激光导引搬运机器人,计算与反射板的距离;磁传感器多用于磁导引搬运机器人。
后台对搬运机器人的监控和通信主要是通过无线通讯实现,利用蓝牙、WiFi等无线通信技术,实现后台与搬运机器人之间的数据传输。
在热轧H型钢智能生产线工序加工流程中,有人工操作的两道工序,一是上料工人操作行车把H型钢工件放置在上料架上,二是卸料工人操作行车将H型钢卸下,先行尝试应用卸料机器人代替人工操作,完成卸料工序工作。
3.5 生产线各工艺环节的智能化检测技术
热轧H型钢钻锯锁生产线的产品质量达到要求与否,需要每道工艺环节的生产均达到产品质量要求,即生产线中每一台数控设备:三维数控钻床、数控带锯床、数控铣削锁口机的加工质量和精度,以及纵向料道和横向料道准确的物料输送和定位精度等均达到要求。
每一台数控设备的加工质量和精度取决于设备本身的制造、装配精度及数控系统的控制精度,主要包括几何精度、定位精度和加工精度。
几何精度综合反映了数控设备机械零部件装配、调整后的几何形状误差,检测时所使用的工具及检测方法类似于普通机床。数控设备的定位精度是指各坐标轴在数控装置控制下运动所达到的位置精度,而重复定位精度是指数控系统执行同一程序代码时设备坐标轴定位位置的一致程度,定位精度和重复定位精度综合反映了数控设备的机械传动精度和数控系统的控制精度,决定了数控设备所能加工零件的精度。
数控设备的加工精度由数控系统的控制精度和设备的机械精度共同组成。数控系统的精度高低、伺服控制的方法是否调整到最优直接影响数控设备的加工精度,而设备的机械本体 精度同样也会制约数控机床的加工精度,影响高精度数控系统实现高精度控制。要研究如何提高数控设备加工精度,设备精度的检测尤为重要。
数控设备存在着制造、装配误差,还存在数控系统的插补进给误差、位置控制误差、伺服系统误差等各种非机械原因造成的误差,实际使用中,这些误差并不可能完全消除。
随着使用时间的增加,数控设备工作时的综合运动误差会变得越来越大,直接影响到设备的加工精度,相应地实时检测、控制其综合运动误差,并适时地给以补偿,可保证设备使用时的正常精度达到产品质量要求,延长设备的使用年限;通过分析数控设备的综合运动误差和精度,对查寻数控设备故障原因,分析工件加工误差产生原因具有重要意义[5]。
为使热轧H型钢智能钻锯锁生产线数控设备和输送设备的加工质量和精度达到要求,既需要针对单台数控设备的检测技术和手段为保障,又需要集数控设备、测头系统、计算机系统及在线检测软件等为一体的在线检测系统,通过在线检测功能与数控系统的高度集成,实时检测和控制生产线的质量达到要求,热轧H型钢智能钻锯锁生产线检测技术如表2所示。

表2 热轧H型钢智能钻锯锁生产线检测技术
4 热轧H型钢智能钻锯锁生产线控制系统构建
4.1 智能生产线控制系统的需求分析和特征
(1)热轧H型钢钻锯锁单机数控系统,备料、存料、辊道输送系统与生产线智能管控系统的集成。
热轧H型钢钻锯锁智能生产线,不只是单机数控设备和备料、存料、辊道输送等设备的功能一体化,更重要的是按照智能生产线管控的系统需求,满足智能生产线的特征而设计、集成和制造;智能管控系统也不只是传统的单机数控设备控制,增加备料、存料和辊道输送等系统的组合控制,而是整条智能生产线的集中协调智能管控,实现单机数控化和智能生产线的全局协调管控。
(2)热轧H型钢钻锯锁生产线工艺设备状态、生产过程参数检测、数据采集及信息交互。
要实现热轧H型钢钻锯锁生产线的智能管控,在工艺设备组成生产线的几个环节,需要具备与智能管控系统之间的传感器检测、数据采集、通信和信息交互,包括:数控钻锯锁单机系统与智能管控系统之间;数控钻锯锁单机系统之间;备料系统与数控锯切工序之间;数控锁扣工序与存料系统之间等,形成信息驱动的网络化集成控制的智能化模式[5]。
(3)热轧H型钢钻锯锁生产线工艺知识数据库及工艺知识模型的建立,根据实时采集的生产线数据和信息,经工艺模型的计算和分析,提供最优的工艺路线及参数,对热轧H型钢钻锯锁生产线设备进行智能管控。
根据已有的热轧H型钢钻锯锁生产线工艺知识,建立工艺知识数据库和工艺知识模型,在生产中学习并获取新的工艺知识,智能维护工艺知识数据库;采集生产线信息,通过工艺知识数据库和工艺模型,对信息进行加工、计算和分析,为生产线智能管控提供最优工艺路线和参数。
4.2 智能生产线控制系统架构
以两锯、一钻、两锁组成的生产线为例,热轧H型钢智能钻锯锁生产线控制系统采用三层架构,分别为现场控制层、SCADA集中监控层和MES管理层,现场控制层与SCADA集中监控层采用现场总线通信网络,集中监控层与MES管理层采用以太网通信网络;卸料机器人与卸料工作站采用无线WiFi通信,如图3所示。
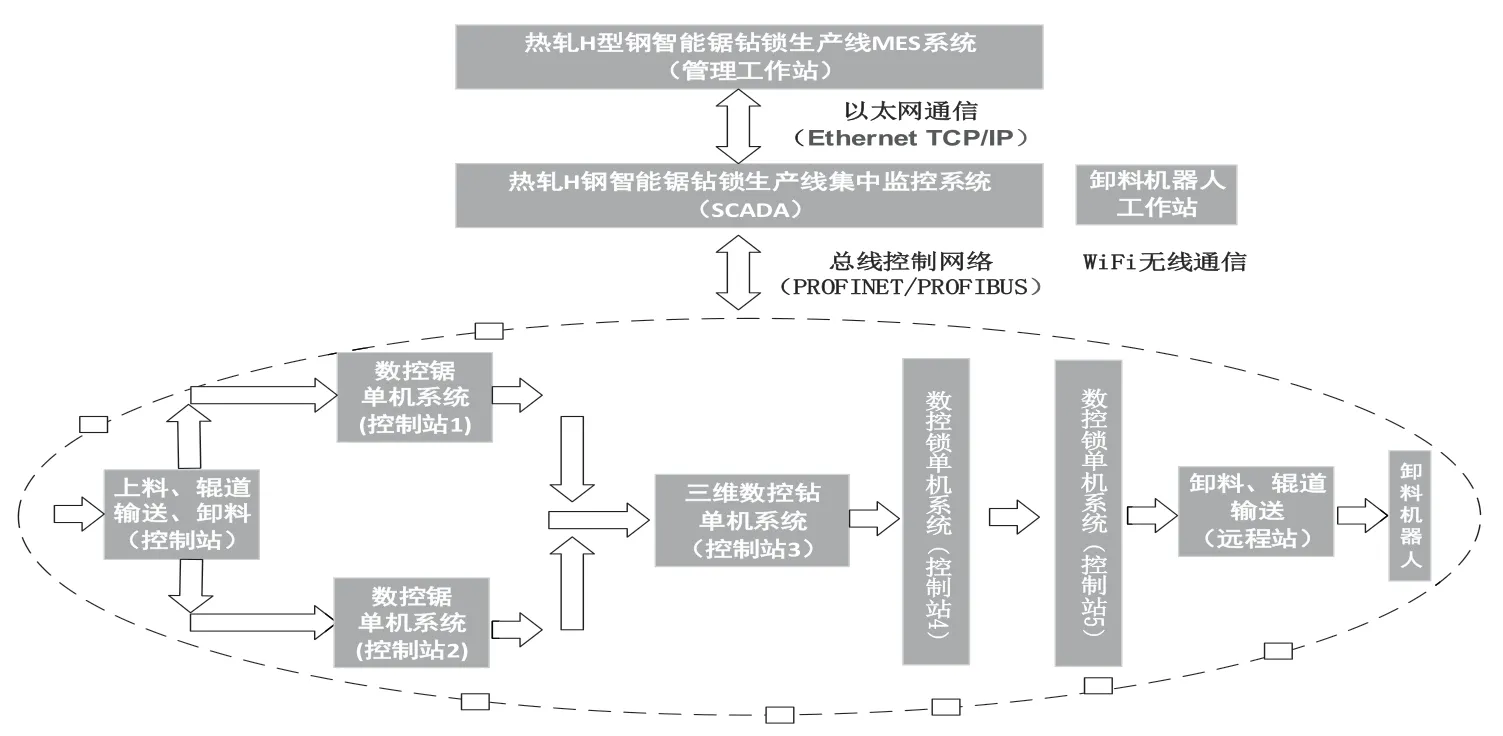
图3 热轧H型钢智能钻锯锁生产线控制系统架构
(1)现场控制层
现场控制层设有单机系统控制站5台,分别为控制站1至5,完成钻锯锁设备的单机控制;在生产线上料口附近,设控制站1台,在生产线卸料口附近,设远程站1台,完成对物料输送系统(包括上料、辊道输送和卸料)的控制;各单机系统通过现场总线形成总线控制网络;各控制站完成对各自伺服系统、检测系统、变频系统、I/O系统的控制;生产线卸料工序流程中,卸料机器人完成热轧H型钢加工成品的卸料。
(2)SCADA集中监控层
SCADA集中监控层设工作站计算机,通过现场总线通信模块接入现场总线网络,连接各个控制站;通过工业以太网通信接口,与MES管理系统连接。控制操作站直接控制生产线输送系统的PLC,同时通过总线网络,完成对各单机控制系统的信号交互,完成对生产线的协调集中控制,接收MES管理系统的最优工艺路线和参数的指令。
(3)MES管理层
整条生产线设管理工作站,利用MES管理软件,集中管理生产线工艺设备及生产计划,在生产现场只需少量操作人员甚至无人化,热轧H型钢从程序启动开始,通过物料输送系统,将工件输送至各个加工单元,按照工艺路线和参数要求生产加工,完毕后继续执行其他排产计划。
4.3 智能生产线SCADA集中监控系统
热轧H型钢智能钻锯锁生产线SCADA集中监控系统,主要完成四大任务:一是对物料输送系统的控制,二是对各单机数控设备的数据采集和数据交互,三是对生产线工艺设备的集中监视和协调控制,四是与MES管理系统的管控功能集成,同时,SCADA系统与卸料机器人工作站之间,以通信方式建立信息交互,如图4所示。

图4 热轧H型钢智能钻锯锁生产线SCADA集中监控系统
4.4 MES管理系统
将MES管理系统集成到生产线控制系统中,即实现对热轧H型钢钻锯锁加工生产过程的智能管控,包括收集生产线生产信息,包括设备、安全、质量、产量等信息,对生产情况进行全方位跟踪,并出具各生产情况报表。
成本管控:按工艺环节收集生产线消耗原料信息,并通过原料价格、计划原料消耗等系统计算和分析后,得出各设备和生产环节的计划生产成本,实际消耗成本信息,掌握并监控生产成本情况。
工艺质量管控:智能维护生产线工艺知识库的参数 ,采集现场实际使用参数,经工艺模型计算、分析和比较 ,发现并调整生产环节各工艺参数和加工路线,对设备、原料出人库加工进行管理,包括库存管理,跟踪设备及物料库存情况 ,制定设备检修计划,记录设备故障及维修记录等[6]。
4.5 智能生产线系统控制程序策略
热轧H型钢智能钻锯锁生产线系统控制程序策略如图5所示。

图5 热轧H型钢智能钻锯锁智能生产线系统控制程序策略
智能生产线系统控制程序策略包括三个方面:一是采用生产线工序加工流程为主控流程顺序;二是主控流程每一步执行的条件,依据生产线全局实时数据,经分析判断算法,确定执行对应的子程序和步数,实现单机数控和智能生产线的全局协调运行;三是基于MES管理系统的工艺知识数据库和工艺模型,对生产线实时数据进行加工、计算和分析,为主控流程顺序确定最优工艺路线和技术参数,实现信息驱动的网络集成智能管控模式。
5 结语
通过对热轧H型钢智能钻锯锁生产线的研究,分析了国产智能化钻锯锁生产线研发的必要性和重要性,比较了传统生产线与智能化生产线的差异和特点,分析了智能生产线控制系统的关键技术、控制需求和特征,提出了智能生产线总体架构和控制系统程序策略,为研发热轧H型钢智能钻锯锁生产线做好前期准备。
猜你喜欢
杭州电子科技大学学报(自然科学版)(2022年4期)2022-08-23
杭州电子科技大学学报(自然科学版)(2022年3期)2022-06-08
网络安全与数据管理(2022年2期)2022-05-23
中国建筑金属结构(2022年3期)2022-04-30
科技创新与应用(2022年6期)2022-03-24
智能制造(2021年4期)2021-11-04
杭州电子科技大学学报(自然科学版)(2020年3期)2020-06-08
汽车文摘(2017年6期)2017-12-06
专用汽车(2016年1期)2016-03-01
安徽冶金科技职业学院学报(2015年3期)2015-12-02
