
空基跟踪平台变焦镜头光机热集成分析
2020-06-07 12:00杜伟峰刘永志高文杰胡雄超
激光与红外 2020年5期
杜伟峰,刘永志,高文杰,胡雄超
(1.上海航天控制技术研究所,上海 200233; 2.火箭军装备部驻天津地区军事代表室,天津 300308)
1 引 言
空基光电跟踪平台作在复杂的温度环境下,跟踪镜头将会受到严酷的高空热载荷的考验。在温度应力的影响下,光机结构热变形会导致变焦镜头各光学元件表面产生刚体位移,导致光学元件倾斜、像面漂移等问题以及MTF的下降。根据技术指标要求,空基光电跟踪平台的许用温度为-20~50 ℃。当工况温度升降时,空基光电跟踪平台变焦光学系统的光学元件面型、距离和透镜厚度等都将受到随之变化,因此,为了确保光机镜头的成像质量,需要对跟踪平台变焦镜头进行光机热集成分析以完成温度适应性研究。
光机热集成分析技术在航空领域的应用以及较为成熟,通过设计-仿真-设计反复迭代过程[1-5],考核光机结构在工况载荷下的光学元件的中心厚度变化、间距变化、离轴、偏心等影响,优化空基、天基光机系统,提高系统的复杂空间环境的适应能力。本文以空基光电跟踪平台变焦光学系统为研究对象,通过光机热集成分析的方法对光学系统进行热光学分析,通过Sigfit软件进Zernike 多项式拟合,拟合后导入到 Zemax中分析成像质量。本文分析了由于温度变化所引起的刚体位移变化,镜片中心厚度变化,镜片间距变化,离轴、偏心等变化等,计算结果表明该系统满足空基温度环境下的使用要求。
2 光机热集成分析方法
1982年,美国霍尼韦尔公司光电中心的Jacob、Miller等人首次提出了光机热集成分析方法的概念,并第一次应用在光电仪器分析[6]。典型的光机热集成分析方法为TSO技术,即therma1-structura1-optica1数据转换集成化分析,以进行光机系统在力热载荷下的性能评估。TSO分析技术分析流程如图1所示。
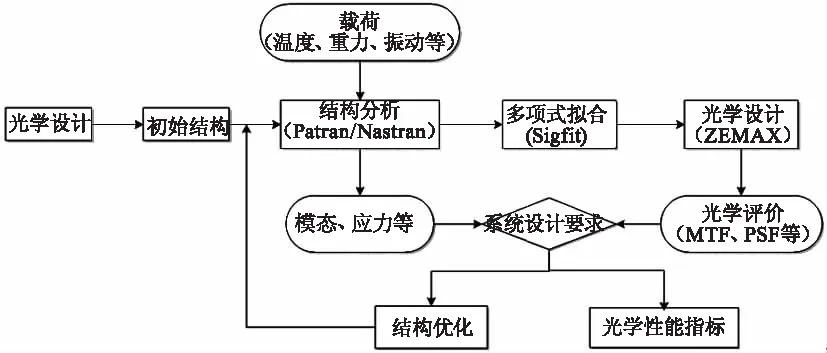
图1 TSO技术分析流程Fig.1 TSO technical analysis process
光机热集成分析方法的优势在于一个模型同时集成了动力载荷、热载荷等多重环境扰动,使得针对空间光学仪器系统集成级的工程分析成为可能。然而,如何将有限元结构分析技术计算出的刚体变形点云数据准确地联合至光学波像差、MTF变化是集成分析技术的核心。目前,国内外研究者均利用Zernike多项式作为光机热集成分析方法中的数据接口纽带,实现了结构有限元分析结果与光学分析间的数据转化、兼容、传输[7]。因为光学系统的波像差可以表达成一个完备基底函数的线性组合,而Zernike多项式恰好为单位圆内互为正交的完备多项式组合,可作为描述光学波像差的表达式,即Zernike多项式是理想的结构分析和光学分析之间的接口工具。
本文所采用Sigfit光机接口工具就是以Zernike多项式为基底函数,采用最小二乘法进行数据的处理和拟合,将变形后的面形点云刚体位移数据转换为ZEMAX软件可读取数据。Sigfit光机接口工具处理数据和拟合流程图如图2所示。
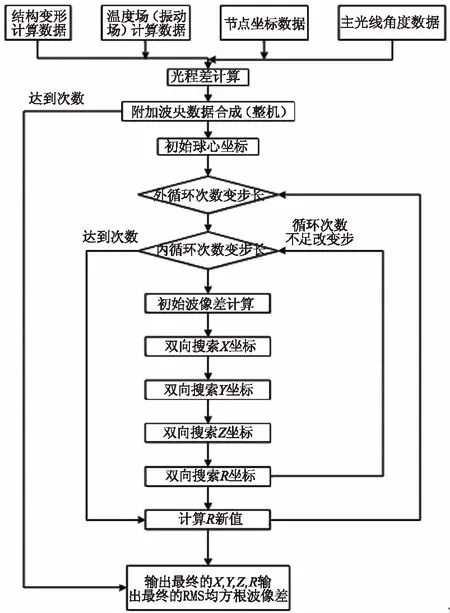
图2 Sigfit光机接口工具处理数据及拟合流程图Fig.2 Sigfit optomechanical interface tool processing data and fitting flow chart
3 变焦镜头光机系统设计
3.1 变焦镜头光学系统
依据技术指标要求:焦距范围,20~100mm;波长,0.38~0.76 μm;像质,MTF大于0.2;工作温度,-20~+50 ℃。在ZEMAX中对变焦镜头进行优化设计,设计结果如图3所示。
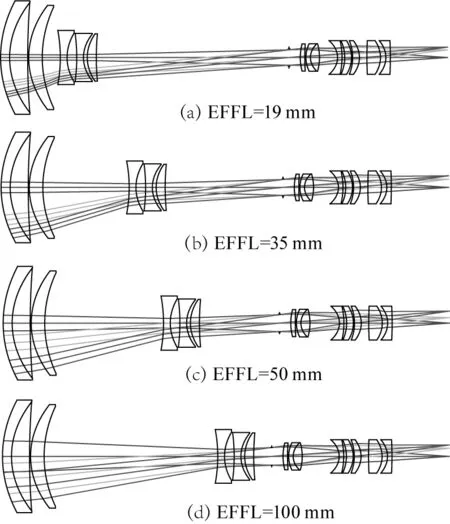
图3 变焦光学系统示意图Fig.3 Schematic diagram of zoom optical system
从图3中可以看出,在整个变焦距过程中,各组元移动未见碰撞情况。变焦镜头在不同焦距组态下的MTF如图4所示。
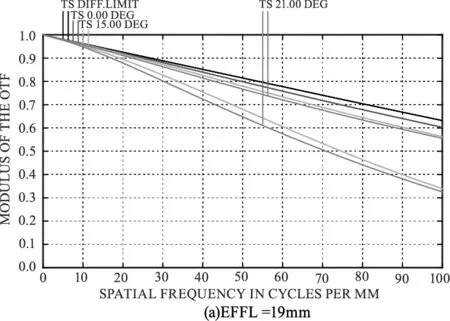
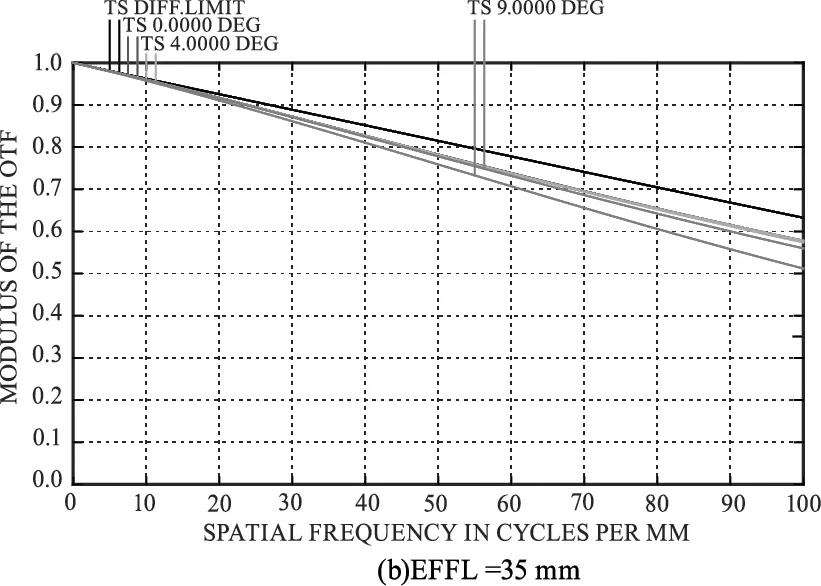
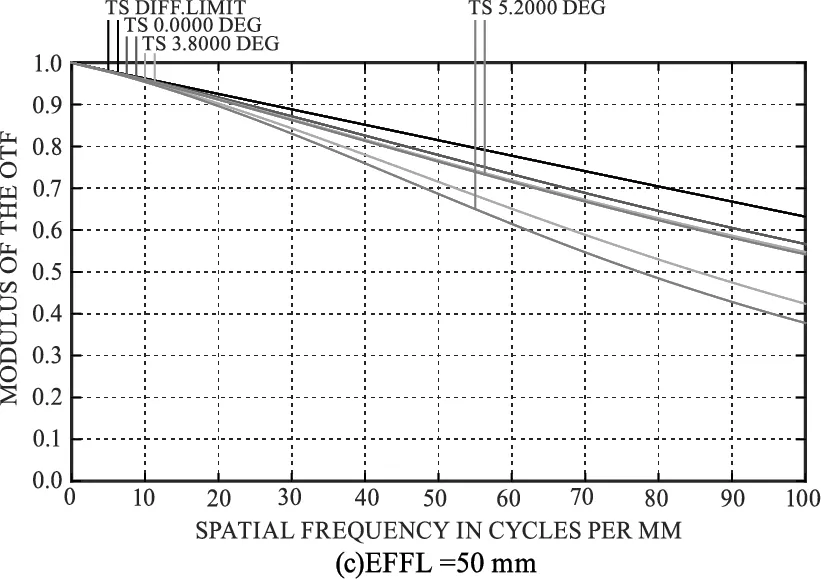
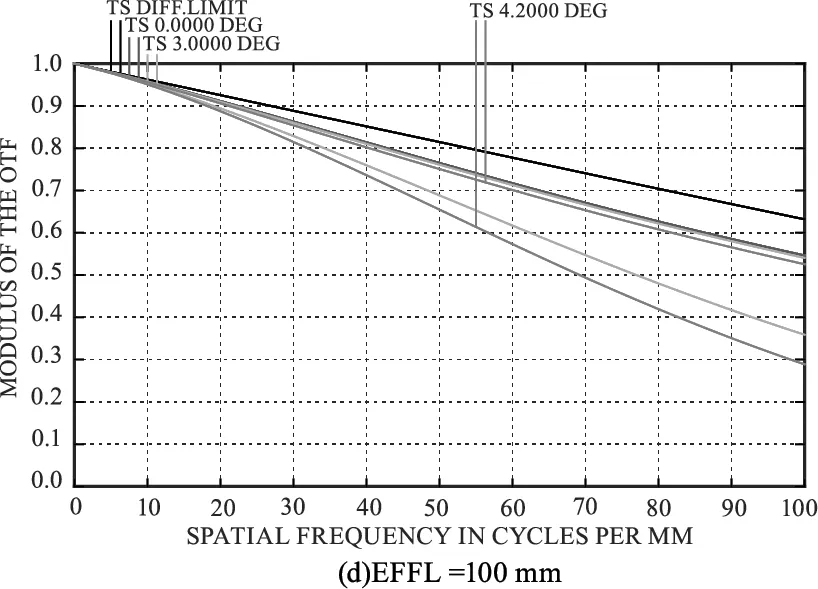
图4 多重焦距组态的MTF曲线Fig.4 MTF curve for multiple focal lengthconfiguration
从图4中可以看出,变焦镜头在不同焦距组态下中心视场的MTF>0.4@91 lp/mm,边缘视场处的MTF>0.3@91 lp/mm,很好地满足技术指标成像要求。
3.2 变焦镜头机械结构
变焦镜头为机械补偿变焦距系统,其光学结构由前固定组、变焦组和补偿组、后固定组构成[8]。由于补偿组的光轴位移量具有非线性特征,所以考虑采用精密机械凸轮沿周向旋转驱动变倍组和补偿组实现沿轴的直线移动,保证了变倍和补偿组实现周向线性同步运动,实现变焦过程中像面位置始终保持在同一稳定位置的目的。
经过结构零件尺寸排布以及选材,最终得到一套性能可靠的光机结构如图5所示,系统结构由(1)前固定组,(2)变倍组,(3)补偿组,(4)后固定组,(5)定向圆柱导轨,(6)精密机械凸轮,(7)传动齿轮,(8)电机,(9)角度反馈器,(10)CCD组成。
4 空基变焦镜头光机热集成分析
4.1 有限元模型的建立
鉴于变焦镜头结构体均为轴对称回转体,所以镜头整体均采用六面体手动划分网格,以提高模型精度和计算精确性。在Hypermesh软件中建立有限元三维模型,共划分15227个高质量六面体单元并等效耦合节点,网格云雅各比小于0.7,占比率为92 %,其中导向柱采用一维梁单元划分,结构有限元剖视图如图6所示。镜头材料参数如表1所示。
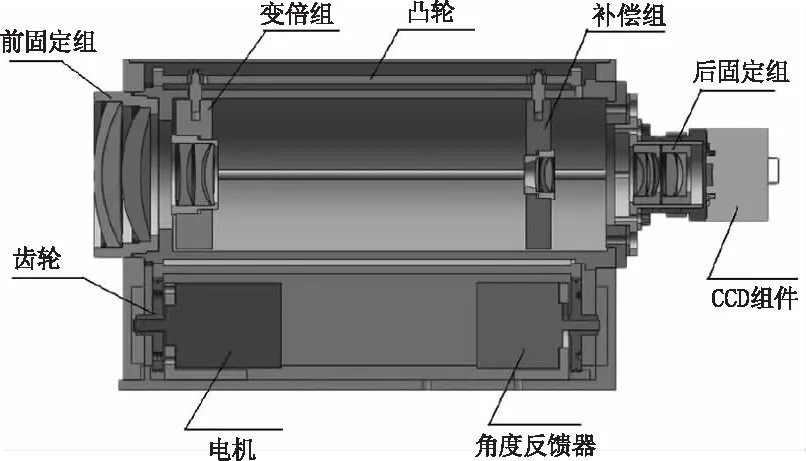
图5 变焦镜头光机结构Fig.5 Zoom lens optical machine structure
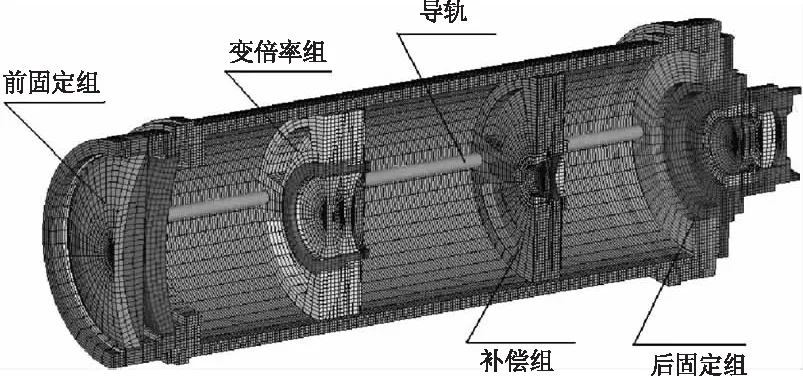
图6 变焦镜头有限元模型Fig.6 Zoom lens finite element model
表1 镜头光机材料参数表
Tab.1 Zoom lens material parameter table
4.2 热载荷分析结果
在Patran软件中对有限元模型加载热载荷以及位移约束,设镜头参考温度为室温20 ℃,指标要求环境极限温度为-20 ℃和50 ℃,作为温度载荷施加在系统光机结构上。设置位移约束位置为凸轮座与调整架的连接位置处。模型导入Nastran软件中进行解算,计算后发现在热力载荷影响下-20 ℃时镜头产生最大应变,镜头刚体位移云图如图7所示。
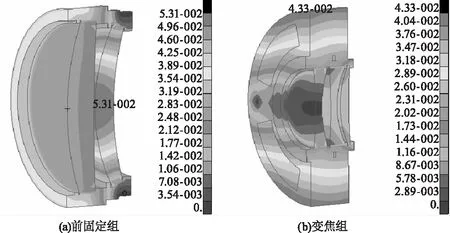
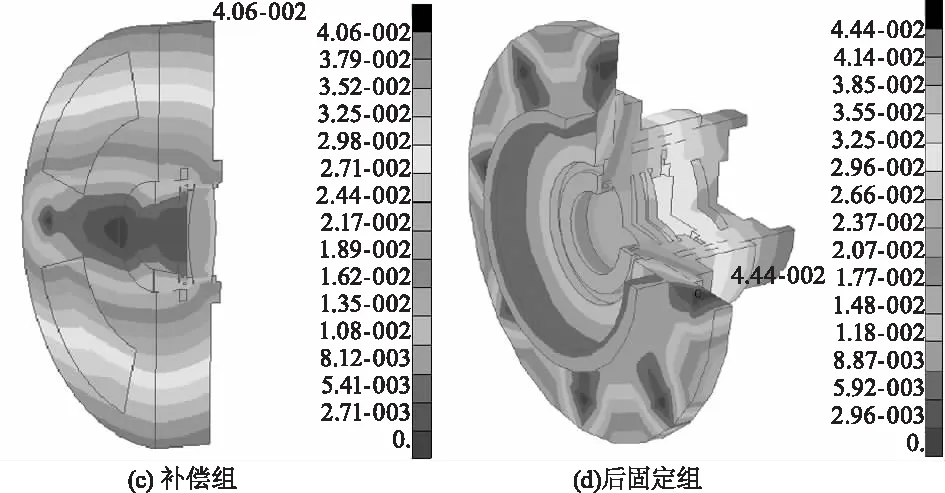

图7 -20 ℃变焦镜头热变形刚体位移云图Fig.7 Rigid body displacement nephogram of zoom lens
4.3 基于Sigfit的光机热集成分析
热载荷分析后需将各光学元件刚体位移与面形曲率变化体现在MTF 曲线上。本文以 Zernike 多项式作为有限元刚体位移与光学软件像质评价的衔接工具,提取各元件变形后的位移通过 Sigfit 软件采用 Fringe Zernike拟合计算分析,再将结果导入Zemax 软件分析像质。连续光学表面均采用标准 Zernike多项式线性组合进行表示[9-11]:

(1)
式中,ai为第i项的系数;Zi为Zernike环形多项式第i项的系数;ε为中心遮拦比;(ρ,θ)为变形后单元节点的坐标值。利用光机热Sigfit耦合具输入基本参数:包括波长、曲率半径、各组元每个透镜前后表面节点位置bdf文件、热变形后每个透镜前后表面节点扰动pch文件等,并对镜面节点云进行重新编码以防止遗漏或重复。最终得到的 Zernike系数,由于篇幅限制,这里仅列出前固定组元件的Zernike系数如表2、表3所示。
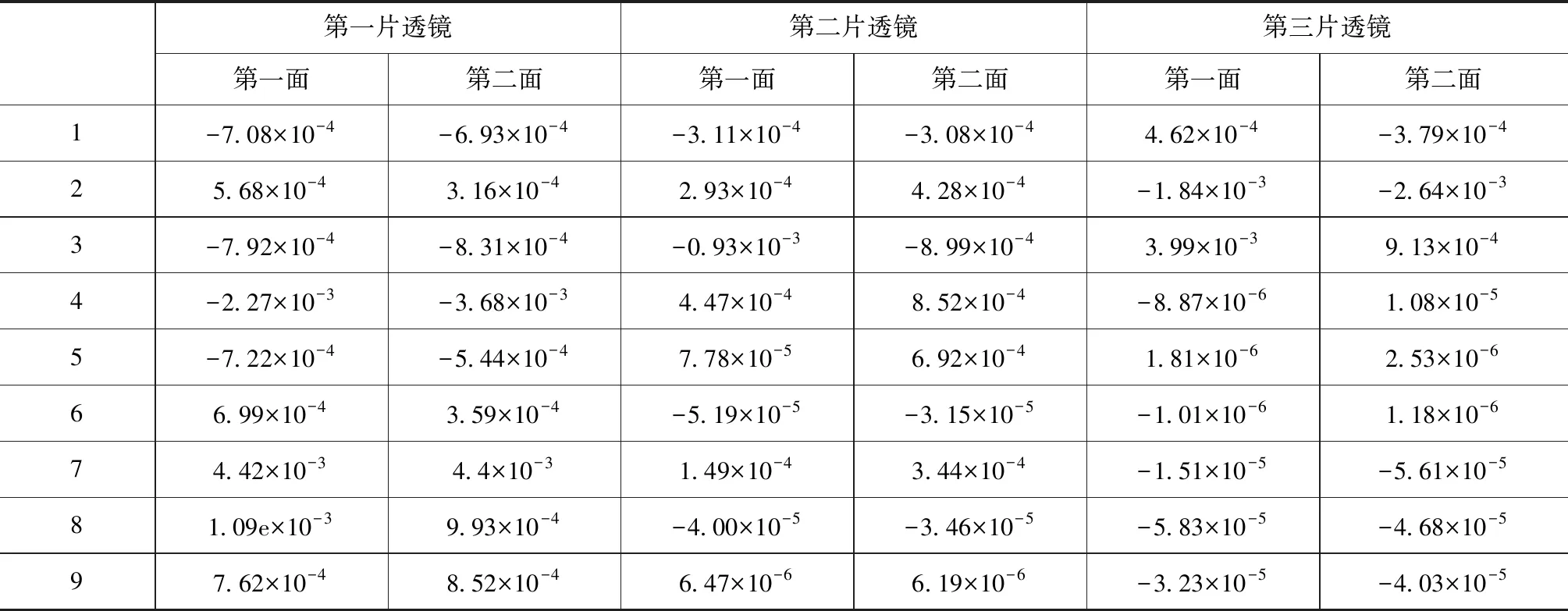
表2 -20 ℃温度载荷下前固定组各镜面 Zernike 系数Tab.2 Zernike polynomial of each surface of former fixed unit under temperature load of -20 ℃
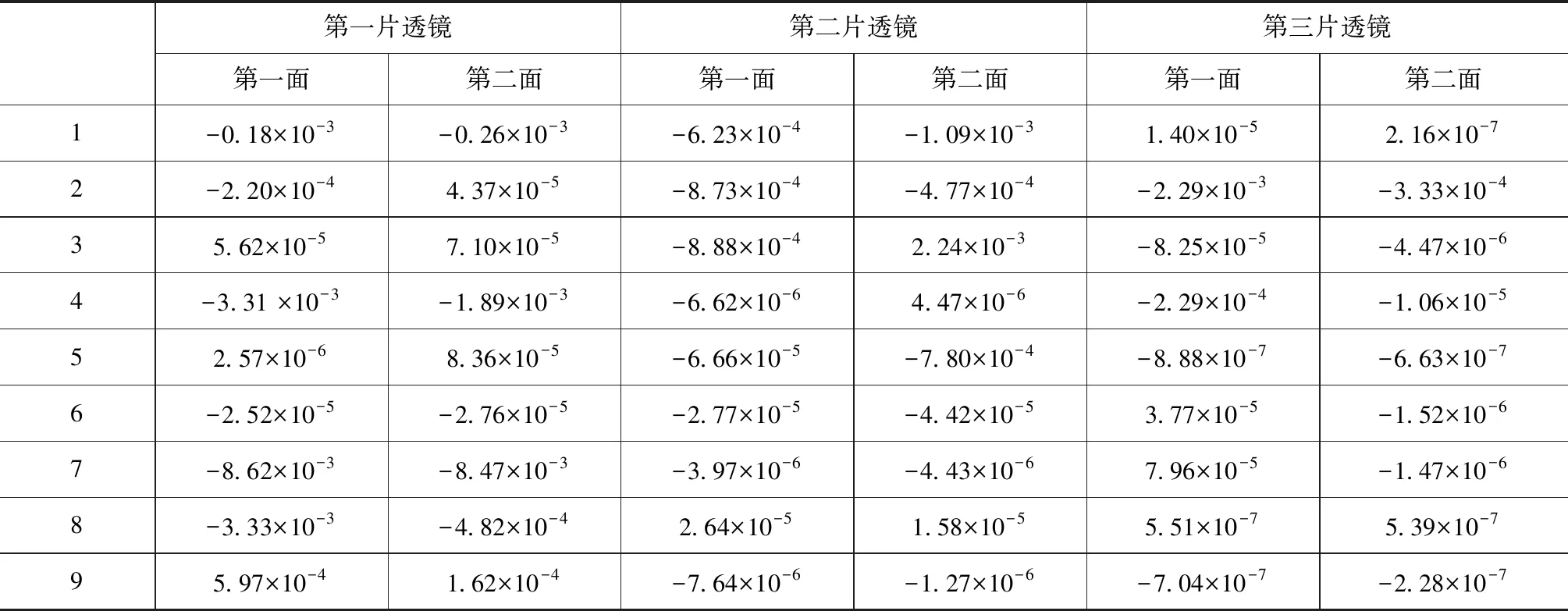
表3 +50 ℃温度载荷下前固定组各镜面 Zernike 系数Tab.3 Zernike polynomial of each surface of former fixed unit under temperature load of +50 ℃
光学系统波像差可以表示为[12]:
W(ρ,θ)=apiston+adefocusρ2+atilt_xρsinθ+atilt_yρcosθ+asaρ4+acoma_xρ3cosθ+acoma_yρ+aas_0ρ2cos2θ+aas_45ρ2sin2θ
(2)
a为各项Seidel像差系数。采用前九项非归一化Zernike多项式进行拟合,以长焦组态为例,经sigfit解算后最大热载荷(-20 ℃)对光学系统的Seidel像差系数大小的影响如表4所示。
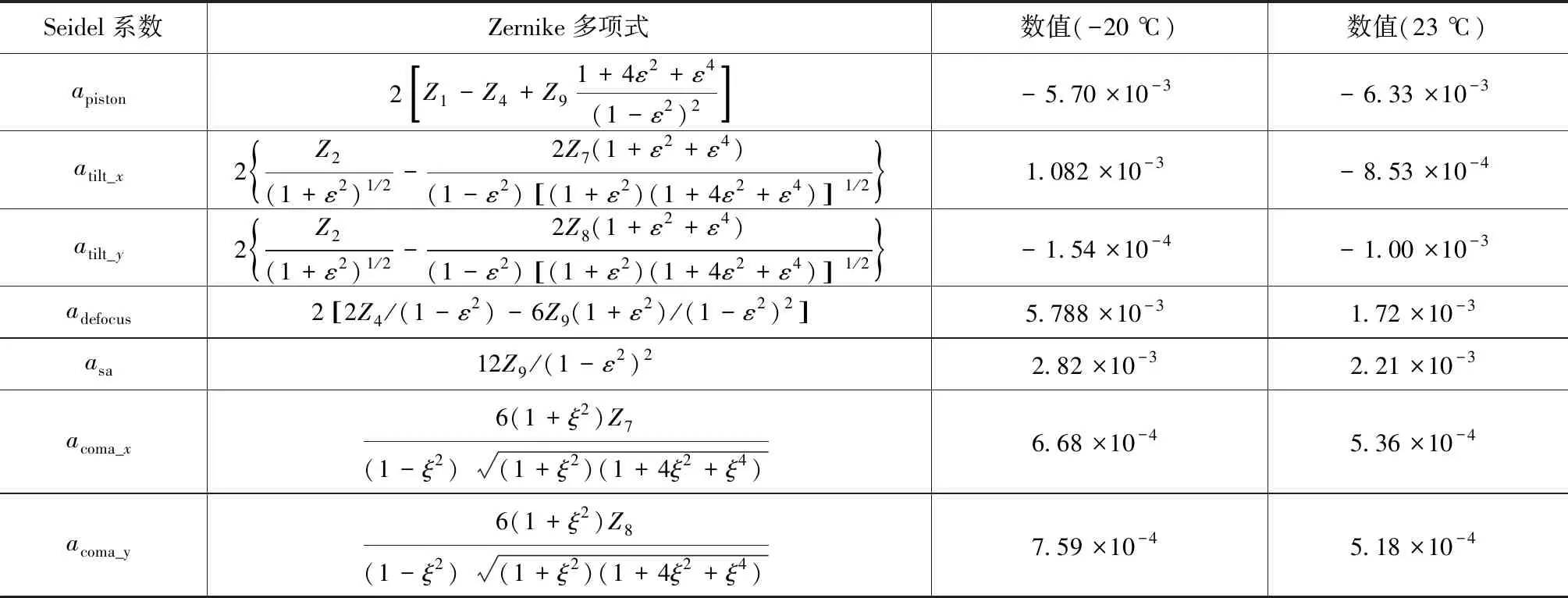
表4 -20 ℃温度载荷下Seidel像差系数Tab.4 Sediel aberration under temperature load of -20 ℃
将各组元光学元件的每个表面的前9项Zernike系数输入到ZEMAX中,得到变焦镜头在温度载荷下的MTF曲线如图8所示。
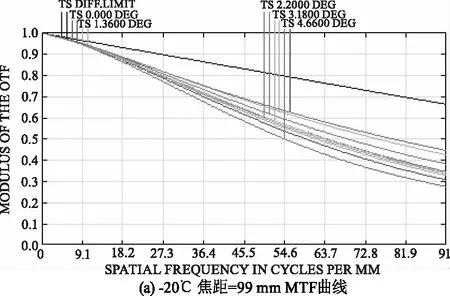
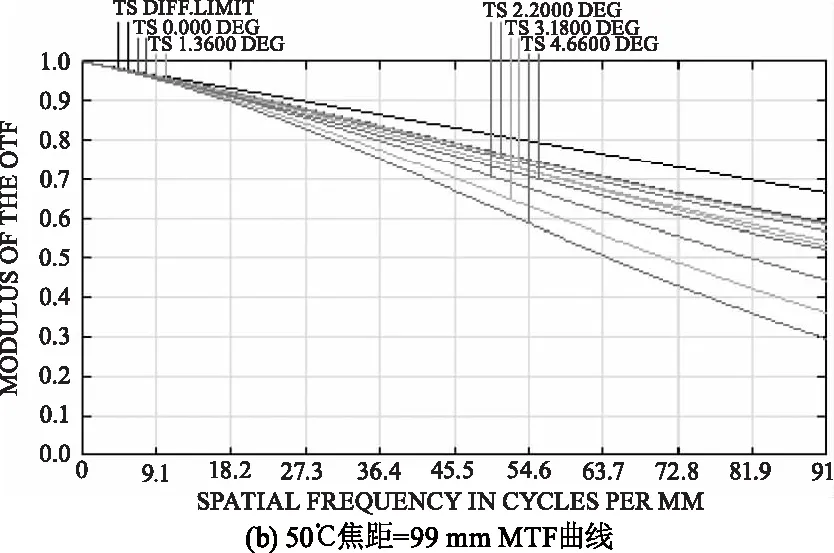
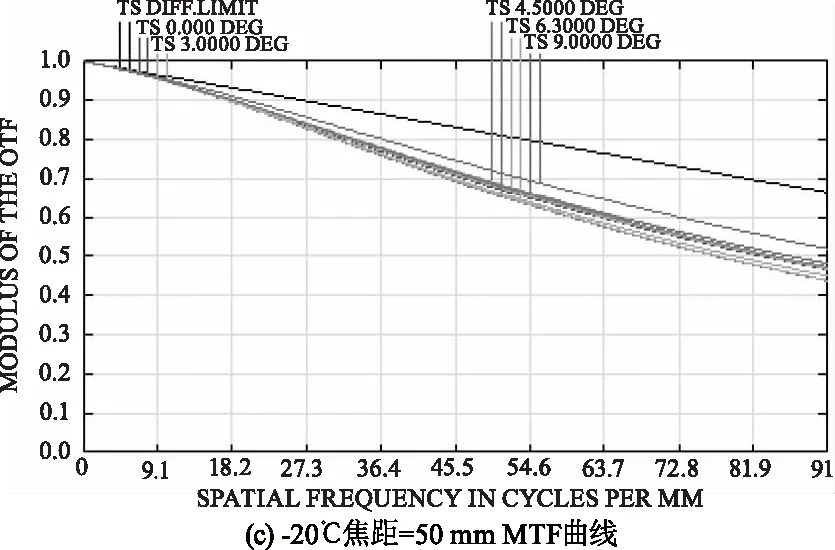
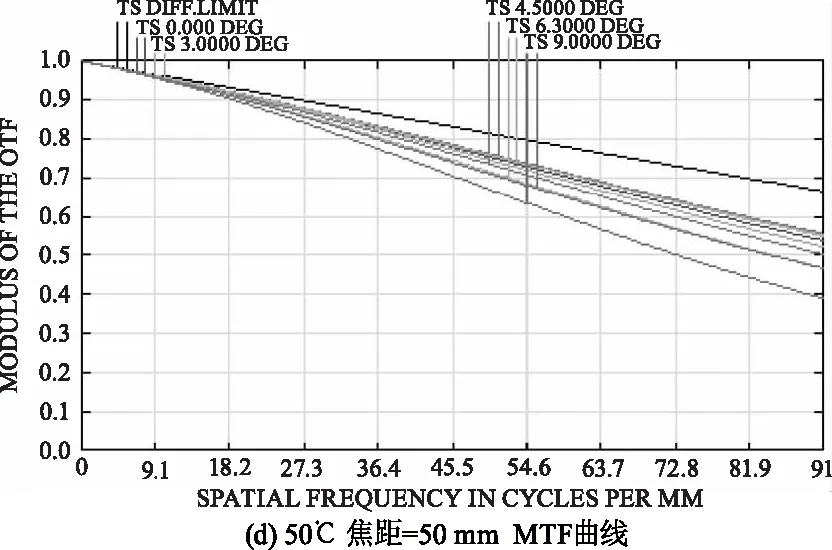
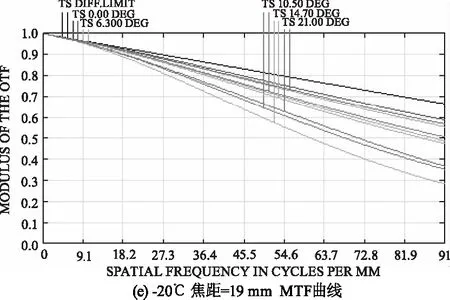
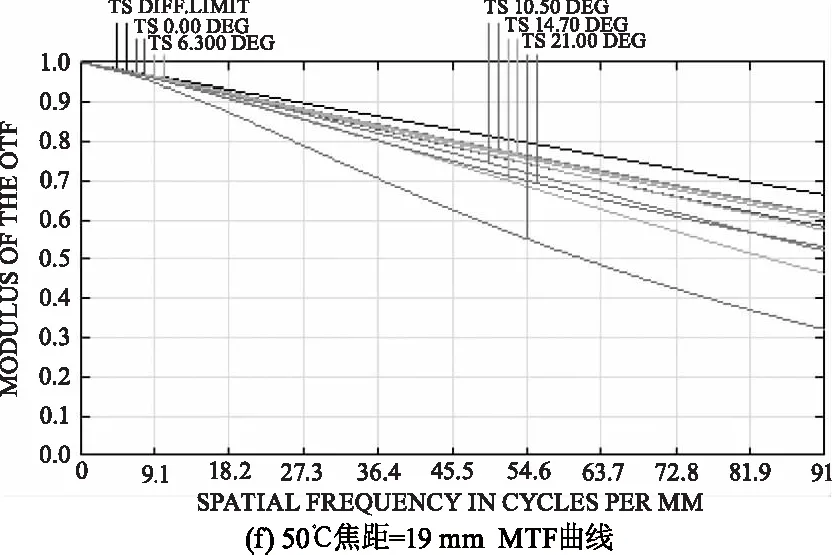
图8 变焦镜头的光学传递函数曲线Fig.8 Optical transfer function curve of zoom lens
通过对比图4与图8常温下与热载荷下的不同焦距的光学传递函数曲线可以得出:温度应力对光机系统焦距为99 mm时影响最大,此时边缘视场光学传递函减小了36 %,但全视场下的光学传函仍然在0.3以上,满足指标要求。热载荷下波前差的变化趋势如图9所示。

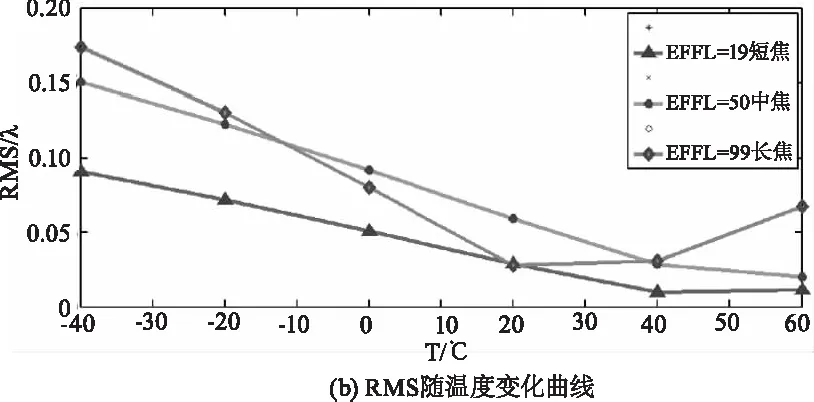
图9 波前差随温度变化曲线Fig.9 Wavefront difference with temperature curve
从上图观察得出RMS值随温度变化不大且小于中心波长的1/4,满足成像质量要求。光学系统对温度载荷并不敏感,成像质量较好且满足技术指标。综上,说明所涉及的变焦镜头光机设计合理,温度适应性良好。
5 镜头温度可靠性实验
为了验证光机热集成分析的准确性以及变焦镜头光机设计的合理性[13],镜头温度可靠性实验采用光学仪器温度应力可靠性实验平台作为检测设备,如图10所示。

图10 光学设备温度应力可靠性实验平台Fig.10 Reliability test platform with temperature stress for optical equipment
将变焦镜头安放温度应力可靠性检测平台中的高低温实验箱中,由积分球提供均匀光源,经由安装有分辨率板的平行光管构建无穷远虚拟目标。无温度应力载荷时(20 ℃)一号分辨率板能够观察至25组线,见图11(a),即焦距为20 mm、50 mm、99 mm处的空间分辨率均大于91 lp/mm。当温控试验箱对镜头施予-20 ℃温度应力2 h,一号分辨率板能仅察至21组线,如图11(b),即焦距为20 mm、50 mm、99 mm处的空间分辨率大于87 lp/mm。在温度应力可靠性检测平台施加温度应力的过程中,变焦镜头基本保持成像清晰。
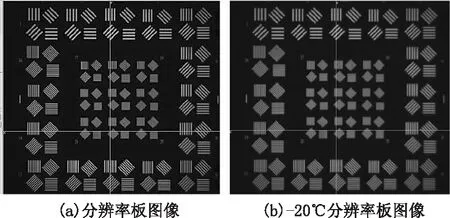
图11 分辨率板图像Fig.11 Resolution board image
6 结 论
本文针对某空基跟踪平台变焦镜头进行光机热集成分析研究,设计了一套5倍变焦距光机系统。利用Sigfit作为光机耦合分析接口软件,进行了跟踪试验前的镜头温度应力适应性预判分析,重点考核镜头在温度载荷下的MTF曲线以及波前差的变化趋势,分析结果表明,跟踪镜头温度适应性良好,设计有效合理。文中所提供的光机热集成分析过程是一套高效、准确、适用范围广的光机热集成分析流程,通过可靠性实验验证变焦镜头的温度适应性,证明该研究方法合理可行,并可应用到其他光学系统的热光学分析研究中。
猜你喜欢
航天制造技术(2022年4期)2022-09-30
花火·绘阅读(2021年2期)2021-09-10
雪豆月读·高年级(2020年7期)2020-09-10
儿童时代·快乐苗苗(2018年6期)2018-09-03
摄影之友(影像视觉)(2018年1期)2018-03-22
大陆桥视野·下(2017年5期)2017-06-19
航空模型(2016年10期)2017-05-09
中国公共安全(2017年9期)2017-02-06
北京航空航天大学学报(2016年7期)2016-11-16
现代防御技术(2016年1期)2016-06-01
